社区
智能硬件
帖子详情
课程设计之ROS履带车底盘(导言)
暗香独自开
2019-04-02 07:03:13
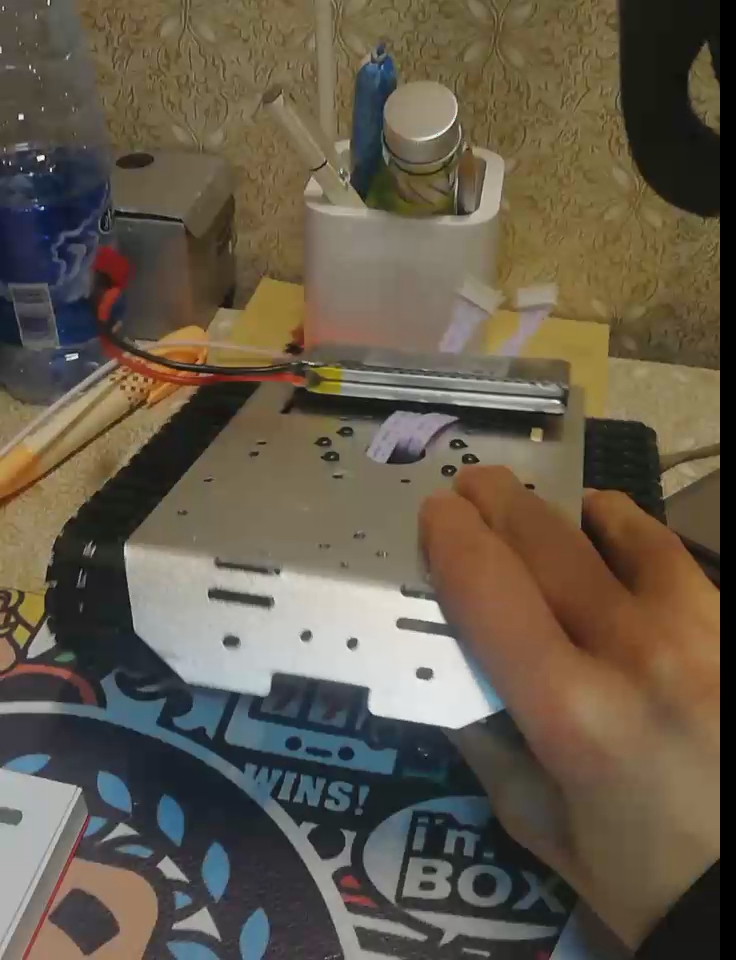
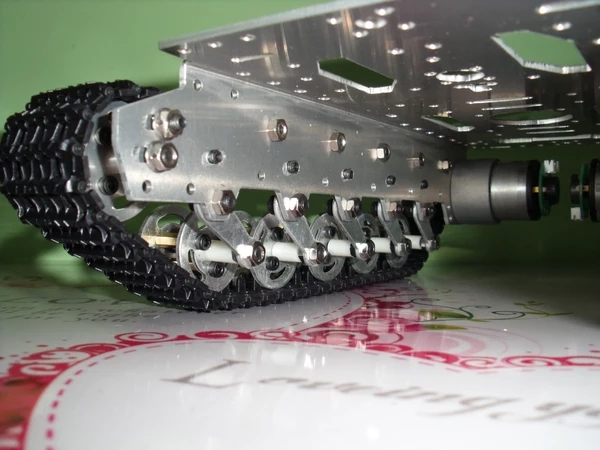
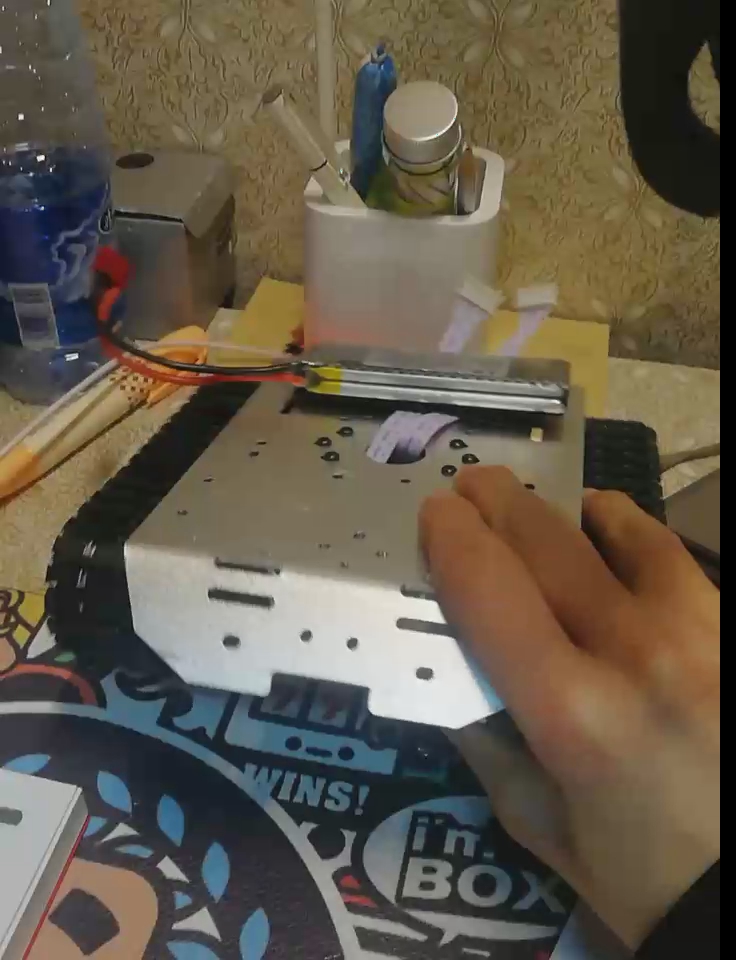
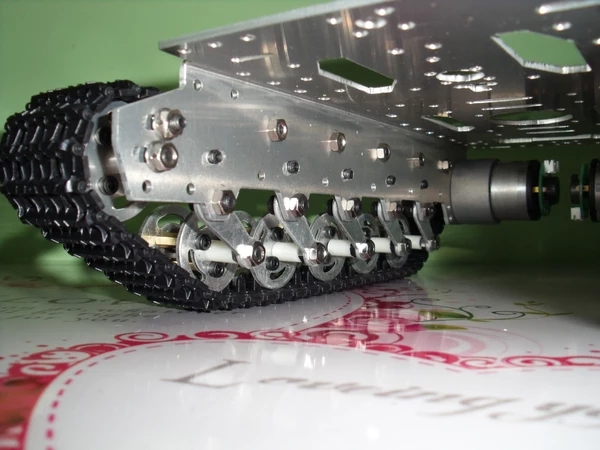
又快到六月份了,毕业季也是分手季,大四的毕业设计着实让人难受,还好今年大二的我在本学期学期末有一个课程叫做--机械工程设计,就在某一个夜黑风高,春风十里的夜里,我突发奇想,早点准备课程设计到时候认认真真的美滋滋岂不是更美哉,于是乎我就发挥想象徘徊在代码逻辑之中..... 我想做的课程设计首先是以机械结构为主,增加电子模块使之完成我脑海里浮现出的想法----在3m的距离内在一群人中识别出指定的人脸,然后跟踪他,当然机器人的速度比人平时走路平均速度要快,(在这里是个追击相遇问题),当机器人与这个人的距离小于等于1m时,调整炮台姿态,----->瞄准 ------>发射炮弹! 在此假想过程中,得自己去设计合理的炮台旋转机构,和炮弹弹射机构,我打算在本专栏的以后的几篇文章里利用Solidworks去画出这些机构的步骤,然后,最终从机械结构到程序设计都详细的说一下,利用ROS这个平台,实现我的跟踪发射机器人.... 我现在手上有一个较小的底盘,如图: 利用这个底盘的话,装上激光雷达和jetson nano会显得十分变扭,不自然,因此我在学校又做了一个比之长两倍,既:270*220*73(mm) ,如图这个底盘我现在不知道该如何处置,说小吧,它还可以做其他的比赛用,比如寻线,硕大吧,他不能做配激光雷达实现我以前做过的无人驾驶小车,唉,先暂时放着吧,如果哪位电子发烧友看中了,请留言给我,我们畅聊一下,搞个py交易也行,其实我还想用这个小底盘做个雷达车再配上摄像头和小型机械臂或者喷枪,搞个恶作剧,唉,可惜时间不允呀,只有早早到了暑假才能让我大显身手.... 好了,现在配一下我的大底盘。。 下一篇我们继续,预告一下 ------>底盘的制作!
...全文
696
2
打赏
收藏
课程设计之ROS履带车底盘(导言)
又快到六月份了,毕业季也是分手季,大四的毕业设计着实让人难受,还好今年大二的我在本学期学期末有一个课程叫做--机械工程设计,就在某一个夜黑风高,春风十里的夜里,我突发奇想,早点准备课程设计到时候认认真真的美滋滋岂不是更美哉,于是乎我就发挥想象徘徊在代码逻辑之中..... 我想做的课程设计首先是以机械结构为主,增加电子模块使之完成我脑海里浮现出的想法----在3m的距离内在一群人中识别出指定的人脸,然后跟踪他,当然机器人的速度比人平时走路平均速度要快,(在这里是个追击相遇问题),当机器人与这个人的
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
2 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
xqhrs232
2019-04-03
打赏
举报
回复
很高深啊!!!牛
暗香独自开
2019-04-03
打赏
举报
回复
我的第一代小车还是有点小,现在有了第二代不知道该如何处置它,哈哈哈
基于
ROS
履带
车
从零开始制做(2):科普人工智能,无人驾驶
历史 推荐电影:《模仿游戏》 --讲的是图灵机的诞生 第一次低谷1974 - 1980: 计算机的运算能力 计算复杂性和指数爆炸 常识与推理 (训练数据集) 。证明定理和解决几何问题对计算机而言相对容易,而一些看似简单的任务,如人脸识别或穿过屋子,实现起来却极端困难。这也是70年代中期机器视觉和机器人方面进展缓慢的原因 第二次AI低谷:1987 - 1993: 专家系统维护费用居高不下。它们难以升级,难以使用,脆弱(当输入异常时会出现莫名其.
基于
ROS
履带
车
从零开始制做(1)-序
背景 毕业近5年,从大二开始接触嵌入式(单片机),接触过不同行业,也陆陆续续做过很多项目,随着时间的推移,对嵌入式行业的认知也越来越深刻。简述一下我的工作经历。在第一份工作,做的产品是AGV(自动导引小
车
),主要是在汽
车
长通过磁条自动循迹,RFID路标,无线(wifi)上位机调度的拉货小
车
。 使用的ST 的单片机控制 ,主要的技术点就是 运动控制(PID),通讯协议,逻辑控制。做的最多的事就是逻辑控制,即将货物沿着轨道运送到指定的地点。其实这个专题的产生很大程度是受 第一份工作的影响,AGV确实是个很有.
ROS
机器人小
车
底盘
DIY有何难?不枉学一番工业设计,巧手搭躯壳
ROS
机器人小
车
底盘
DIY有何难?不枉学一番工业设计,巧手搭躯壳 目标: 四轮驱动,可扩展多层的
车
架结构。 孔位设计: 固定轮子(底座) 固定雷达 固定扩展多层支柱 固定主板,其他传感器,穿线孔等 尺寸就比着一张A4纸来做参考。 图 cad画图,找个朋友的工厂来激光切割、折弯、喷漆。 图
ros
机器人
底盘
的电机,当然是得有反馈,这样才能用PID方法来控制旋转速度和位置。 选个便宜的编码器电机吧 图 电控部分: 电源用12v锂电 两个TB6612驱动电机 12v转5v stm32F103c8t6
开源自主导航小
车
MickX4(一)
ROS
底盘
硬件
开源自主导航小
车
MickX41 小
车
底盘
1.1
底盘
机械组装1.2
底盘
硬件框图2 电气系统搭建 本系列教程意在分享自己学习
ROS
自主导航小
车
时候的笔记,教程内容包含了从零开始搭建一个四轮的小
车
模型,小
车
的名字为 MickX4,教程一共分为4篇: 开源自主导航小
车
MickX4(一)— 小
车
底盘
硬件 开源自主导航小
车
MickX4(二)— 小
车
底盘
软件 开源自主导航小
车
MickX4(三)— 小
车
ROS
节点 1 小
车
底盘
小
车
底盘
运动控制系统(简称:运控系统)主要实现小
车
底盘
的精准速度控制和向工控机提供
底盘
传感器
开源自主导航小
车
MickX4(二)
ROS
底盘
运动控制
开源自主导航小
车
MickX41
ROS
底盘
运动控制 1
ROS
底盘
运动控制 图展示了小
车
底盘
运动控制的功能模块图 小
车
的运动控制包含遥控指令的解析,电机PID控制,电机反馈指令的解析 首先运行外设初始化函数 CAN模块初始化 串口初始化函数 IMU初始化函数 超声波模块初始化函数 PID初始化函数 小
车
核心代码1,串口1使用DMA接受,并解析大疆遥控器发送过来的指令 小
车
核心代码2,电机反馈数据 由于我们使用的大疆M3508电机反馈的数据中包含了电机的转角、速度、电流、温度信息,因此我们定义了一个如下的结构
智能硬件
1,624
社区成员
757
社区内容
发帖
与我相关
我的任务
智能硬件
智能硬件,智能手表,可穿戴设备,智能电视,谷歌眼镜,Google Glass 相关讨论。
复制链接
扫一扫
分享
社区描述
智能硬件,智能手表,可穿戴设备,智能电视,谷歌眼镜,Google Glass 相关讨论。
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章




 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享