


259
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享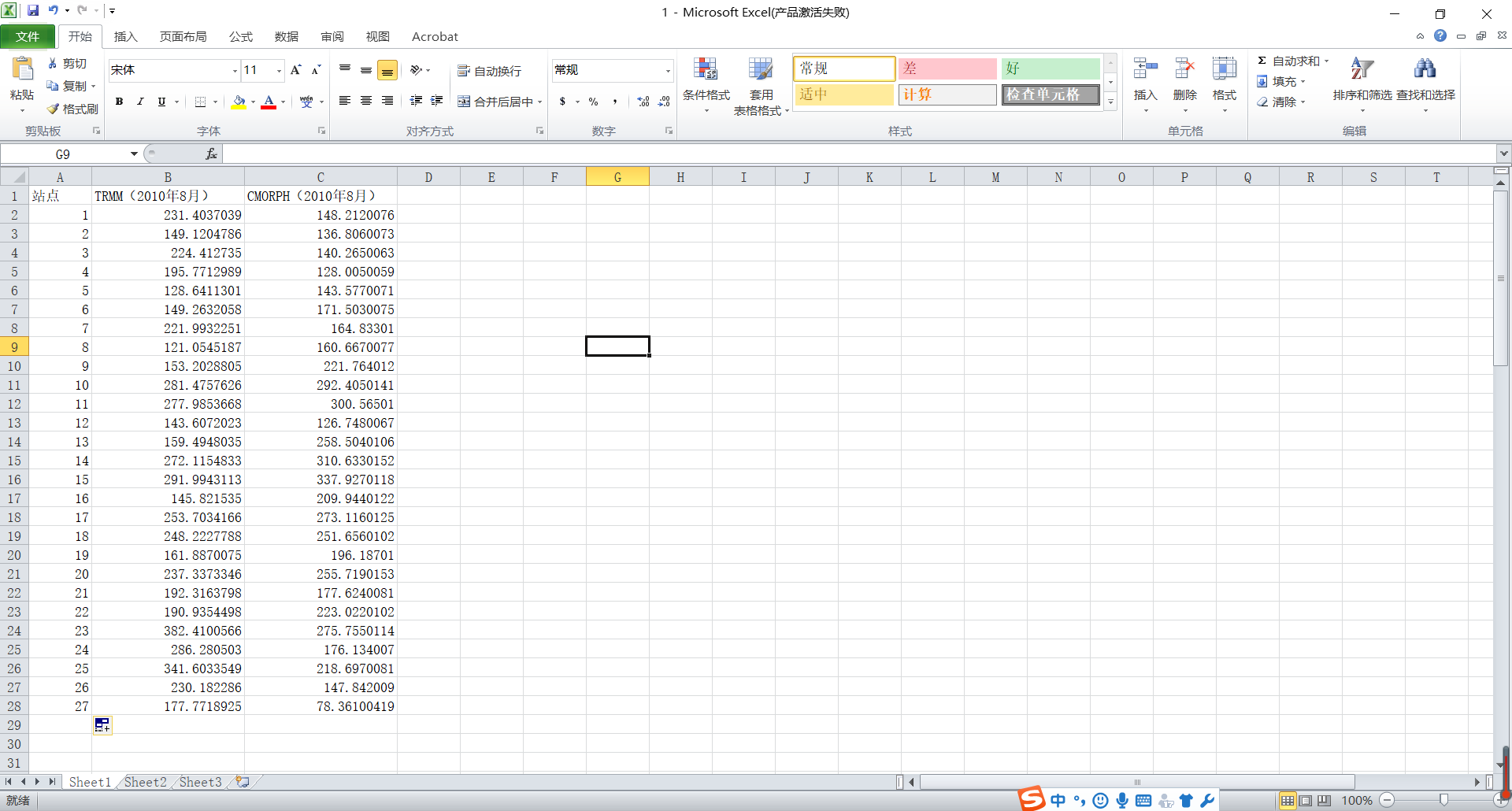
clear all;
clc;
%% 卫星遥感降水数据的导入及参数的设定
Dec = 0.25; %降水数据空间分辨率
Site_number = 27; %实测站点个数
A = 1; %状态转移矩阵
H = 1; %观测算子
data = xlsread('.\ENKF\1.xlsx'); %导入背景场降水数据和融合数据
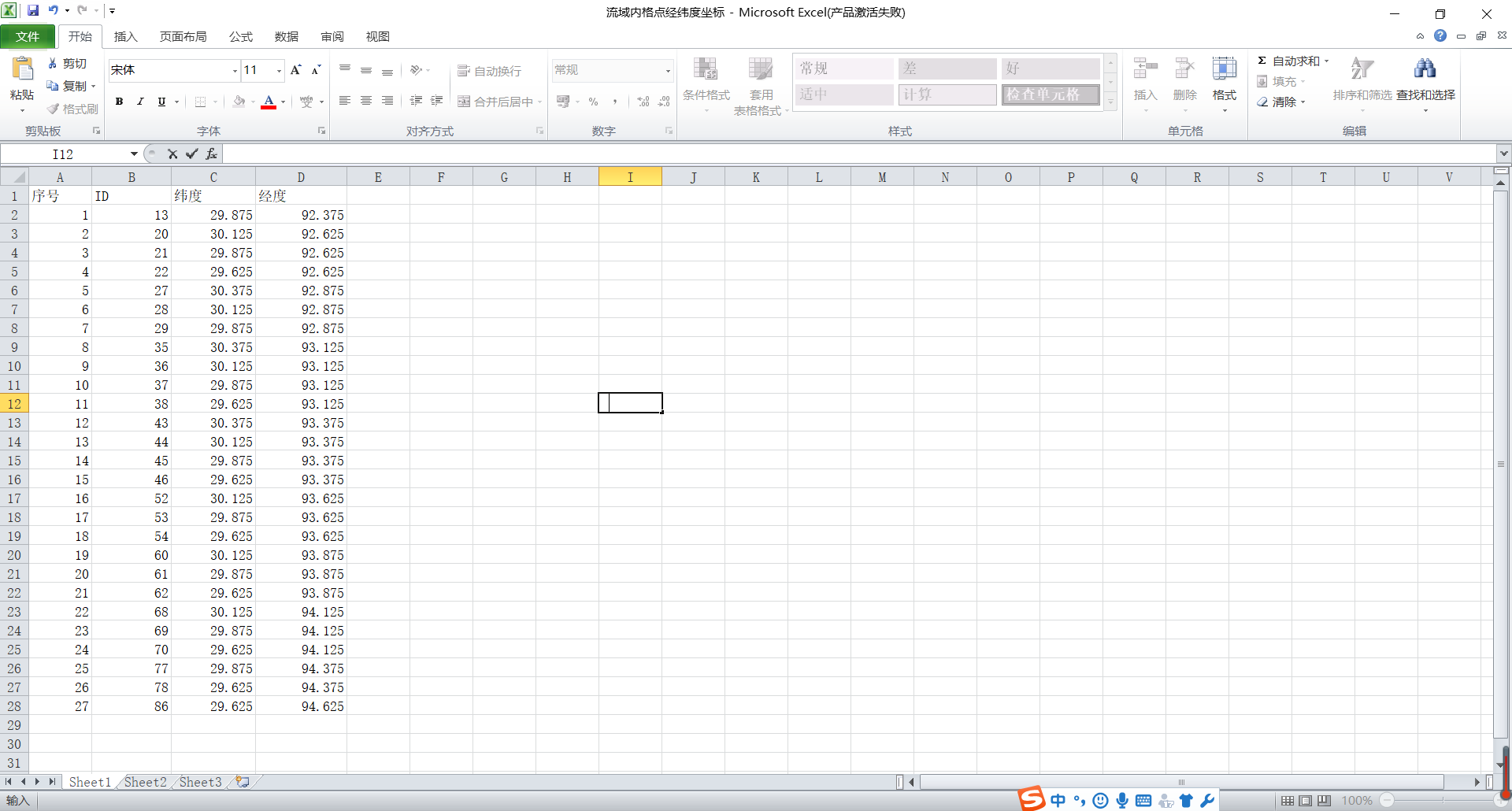
Coord = xlsread('.\ENKF\流域内格点经纬度坐标.xlsx'); %导入尼洋河流域内网格点经纬度坐标
x1 = data(:,1); %背景场降水数据1
x2 = data(:,2); %观测场降水数据
R = 0.7;
Random_count = 1000; %设定生成随机数个数
N=50; %设定从随机数中抽取的个数
n=80; %设定观测数
%% 生成背景场集合及观测场集合的随机扰动
for i=1:Site_number
random = 0+randn(1,Random_count); %随机生成符合均值为0,方差为1的共1000个随机数(背景场)
randomGC = 0+sqrt(R)*randn(1,Random_count); %随机生成符合均值为0,方差为R的共1000个随机数(观测场)
randomcopy(i,:) = random; %记录此行的所有随机数(背景场)
randomcopyGC(i,:) = randomGC; %同理(观测场)
random_choose(i,:) = randsample(Random_count,N,false); %从之前生成的随机数中随机选取其中N个数作为列的索引(背景场)
random_chooseGC(i,:) = randsample(Random_count,n,false); %同理(观测场)
Random(i,:) = random(random_choose(i,:)); %按照上面的索引获取N个随机数的值(背景场)
RandomGC(i,:) = randomGC(random_chooseGC(i,:)); %同理(观测场)
end
%% 对背景场集合及观测场集合添加扰动
x1copy = kron(x1,ones(1,N)); %将初始背景场x1复制为每列都相同的数组
x2copy = kron(x2,ones(1,n)); %将初始观测场x2复制为每列都相同的数组
Xb = x1copy+Random; %生成带扰动的背景场集合
XbGC = x2copy+RandomGC; %生成带扰动的观测场集合
%% 计算背景场及观测场的误差协方差矩阵
Xbmean = mean(Xb,2); %求集合平均值
Xbmeancopy = kron(Xbmean,ones(1,N)); %将集合平均值复制为每列都相同的n列数组
XbRD = Xb-Xbmeancopy; %计算背景场集合扰动项
Q = var(XbRD,0,2); %计算背景场集合扰动项的方差
PbInitial = (XbRD*XbRD')/(N-1); %计算初始背景场误差协方差矩阵
Ob = (RandomGC*RandomGC')/(n-1); %计算观测场误差协方差矩阵
%% 计算局地裁剪函数并更新背景场误差协方差矩阵
for j=1:size(data,1)
for m=1:size(data,1)
Z(j,m) = Distance(Coord(j,3),Coord(j,4),Coord(m,3),Coord(m,4)); %计算距离Z的矩阵
LCF(j,m) = Local_clipping(Z(j,m),0.75); %计算局地裁剪函数的矩阵
end
end
Pb = LCF.*PbInitial; %计算局地化之后的背景场误差协方差矩阵
%% ENKF数据融合
for ii=1:27
X(1,:,ii) = Xb(ii,:); %初始最优估计值
P(ii,1) = Pb(ii,ii); %初始误差协方差
for jj=2:n+1 %迭代次数jj
%% 1、预测方程
X(jj,:,ii) = A*X(jj-1,:,ii); %计算模式预测值
P1(ii,jj-1) = A*P(ii,jj-1)*A'+Q(ii); %计算误差协方差预测值,代表第ii个站点的背景场误差协方差
%% 2、更新方程
Kg(ii,jj-1) = P1(ii,jj-1)*H'/(H*P1(ii,jj-1)*H'+Ob(ii,ii)); %计算此状态卡尔曼系数,代表第ii个站点迭代到第jj次的Kg
XGC = kron(XbGC(ii,:)',ones(1,N));
X(jj,:,ii) = X(jj,:,ii)+Kg(ii,jj-1)*(XGC(jj-1,:)-H*X(jj,:,ii)); %计算此状态最优估计值,代表第ii个站点迭代到第jj次的值
P(ii,jj) = (1-Kg(ii,jj-1)*H)*P1(ii,jj-1); %计算此状态下最优协方差,代表第ii个站点迭代到第jj次的最优协方差
end
Xmean(ii,:) = mean(X(:,:,ii),2)'; %其最后一列的数据为最终融合后的降水数据
end
function [ Z ] = Distance( lat1,lon1,lat2,lon2 )
% Distance函数用于计算两个网格点的经纬度坐标之间的距离
Z = sqrt((lat1-lat2)^2 + (lon1-lon2)^2);
end
function [ P ] = Local_clipping( z,c )
%Local_clipping函数是局地裁减函数,用于减少长距离伪相关的影响
if z>=0 && z<c
P=1-(5/3)*(z/c)^2+(5/8)*(z/c)^3+(1/2)*(z/c)^4-(1/4)*(z/c)^5;
elseif z>=c && z<=2*c
P=-(2/3)*(z/c)^-1+4-5*(z/c)+(5/3)*(z/c)^2+(5/8)*(z/c)^3-(1/2)*(z/c)^4+(1/12)*(z/c)^5;
else
P=0;
end

您好,请问您的问题解决了吗





