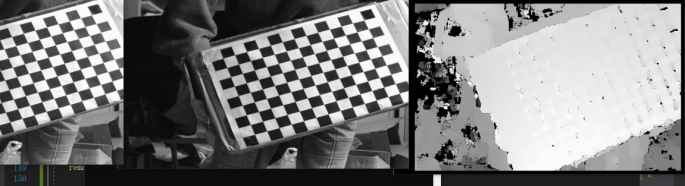
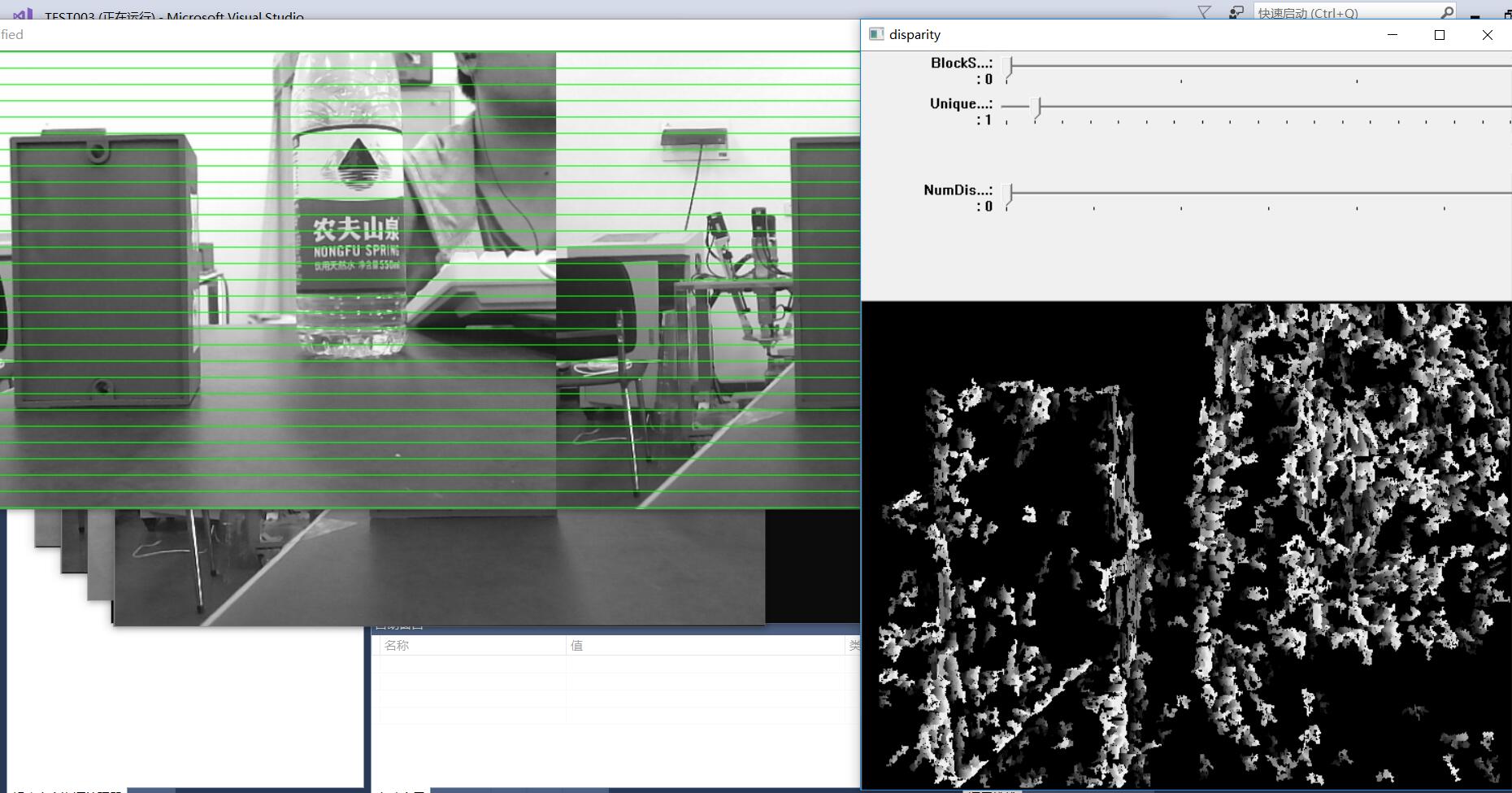
[quote=引用 楼主 qq_34759242的回复:]小生毕设做双目测距的,看过了很多博客,最终是依照https://blog.csdn.net/xiao__run/article/details/78900652 这篇博客的代码为基础写的。用的是matlab标定,效果感觉还不错。但视差图的效果实在是差强人意,网上各种博客的视差图都是链接区域的快状,而我出来的都是零零散散,星星点点的形状,求问是哪个环节出了问题。以下为效果图
小生毕设做双目测距的,看过了很多博客,最终是依照https://blog.csdn.net/xiao__run/article/details/78900652 这篇博客的代码为基础写的。用的是matlab标定,效果感觉还不错。但视差图的效果实在是差强人意,网上各种博客的视差图都是链接区域的快状,而我出来的都是零零散散,星星点点的形状,求问是哪个环节出了问题。以下为效果图
4,246
社区成员
942
社区内容
加载中
OpenCV中国团队官方博客:https://blog.csdn.net/opencvchina
试试用AI创作助手写篇文章吧




 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享