社区
Web 开发
帖子详情
webseverices explore error 500
_肆
2019-04-19 08:29:29
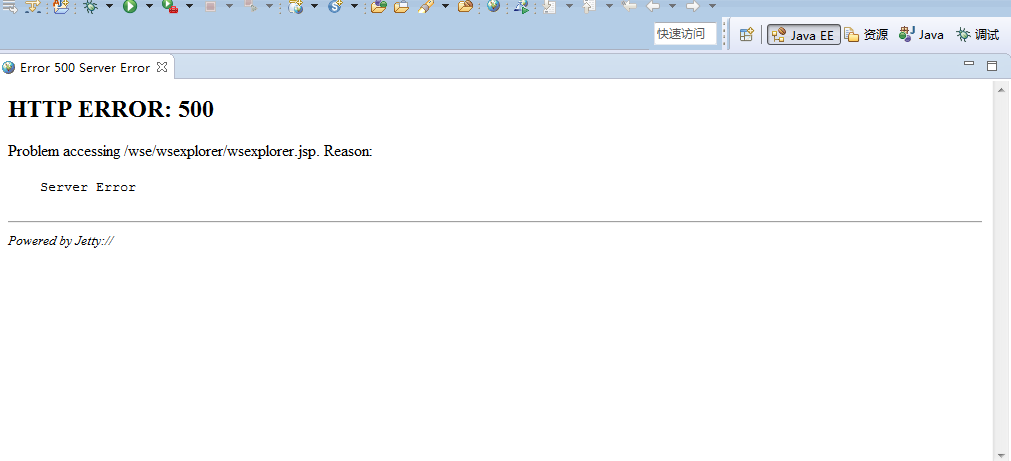
在学尚硅谷的web service,仿照他的操作,什么工程都没,就直接点击java ee下的快捷方式launch web services explore,弹出的界面中是500错误,如图:
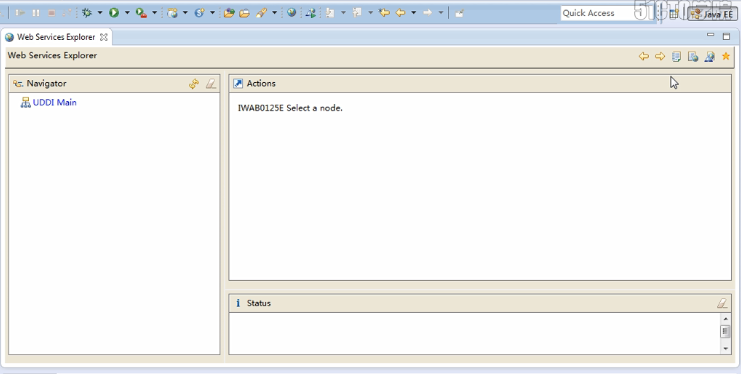
但是老师的打开如图,我试过别人的电脑打开也是好的:
...全文
105
1
打赏
收藏
webseverices explore error 500
在学尚硅谷的web service,仿照他的操作,什么工程都没,就直接点击java ee下的快捷方式launch web services explore,弹出的界面中是500错误,如图: 但是老师的打开如图,我试过别人的电脑打开也是好的:
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
1 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
_肆
2019-04-19
打赏
举报
回复
红色勾的这个图标
软考高项论文模板-论信息系统项目的工作绩效域
软考高项论文模板-论信息系统项目的工作绩效域
政府科技管理者在推动区域科技创新数智大脑建设中,如何解决企业数据资源整合难的问题?.docx
政府科技管理者在推动区域科技创新数智大脑建设中,如何解决企业数据资源整合难的问题?
An_overview_of_robot_calibration.pdf
An_overview_of_robot_calibration.pdf
docker-desktop-x86-64.pkg.tar.zst
docker-desktop-x86_64.pkg.tar.zst
linux + c + 伪汇编指令解析执行 + 伪汇编指令解析执行模拟器
在本任务中,你将实现并操作一个虚拟堆栈。在阅读一组伪汇编指令(这些指令指示应在堆栈上执行的操作)之前,你需要模拟这个虚拟堆栈来存储和引用变量以及堆栈帧上下文。你的程序将接受一个命令行参数,即包含伪汇编代码的文件的名称。 在尝试完成这项作业之前,熟悉堆栈、寄存器、堆栈帧、堆栈指针和程序计数器会是个好主意。在完成这项作业的过程中,你将需要跟踪自己的堆栈帧、管理操作、动态分配内存和处理文件。 程序代码内有备注,有文档说明,程序通过测试运行成功。
Web 开发
81,110
社区成员
341,727
社区内容
发帖
与我相关
我的任务
Web 开发
Java Web 开发
复制链接
扫一扫
分享
社区描述
Java Web 开发
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章




 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享
