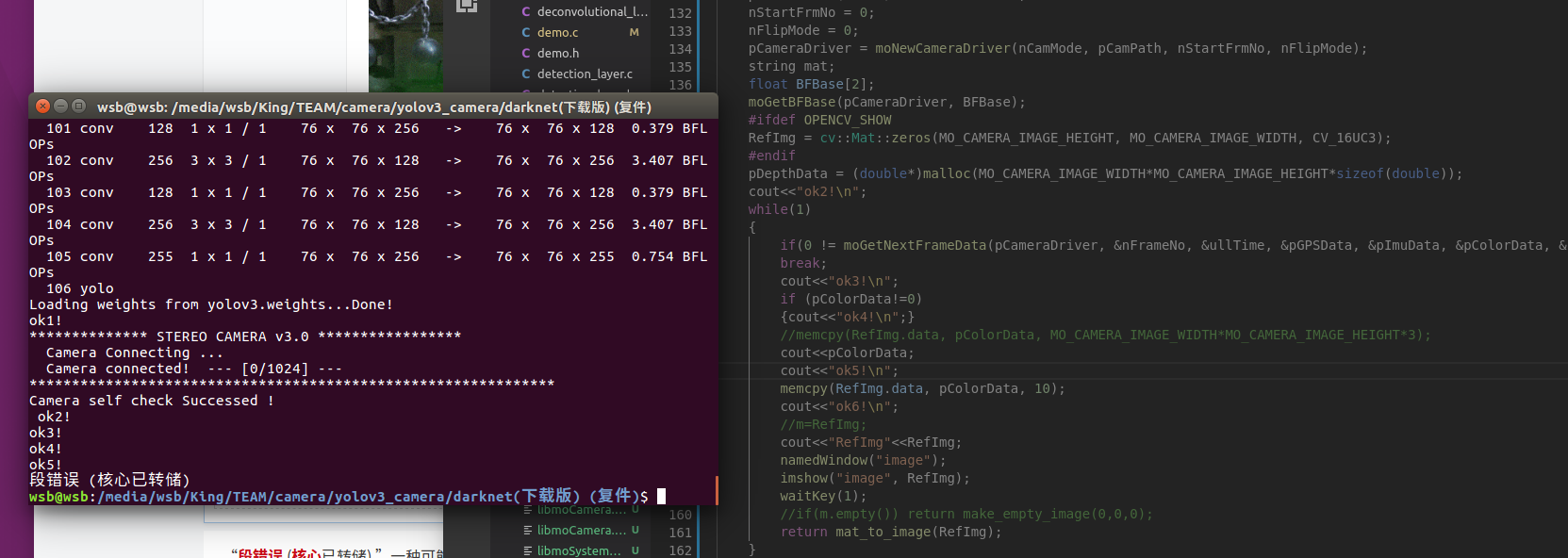
帮忙看一下c++代码,一直报“段错误,核心转存”,大概知道错误在get_image_from_stream函数中的memcpy位置,
 科研小学生 2019-05-28 10:37:23
科研小学生 2019-05-28 10:37:23 #ifdef OPENCV
#include "stdio.h"
#include "stdlib.h"
#include "opencv2/opencv.hpp"
#include "image.h"
using namespace cv;
#include </media/wsb/King/yolov3_camera/darknet1/src/moCameraDriver.h>
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
#include <iostream>
#include <string>
#include<algorithm>
#ifdef OPENCV_SHOW
#include </usr/local/include/opencv2/opencv.hpp>
#endif
#define MO_CAMERA_IMAGE_WIDTH (1280)
#define MO_CAMERA_IMAGE_HEIGHT (720)
/* camera driver */
MO_CAM_DRIVER pCameraDriver;
/* camera parameters */
char nCamMode; //0: Camera
char* pCamPath;
int nStartFrmNo;
char nFlipMode;
/* camera output */
int nFrameNo;
unsigned long long ullTime;
int nChannel, nChangeChn;
void *pGPSData, *pImuData;
unsigned long long Dep=0;
unsigned char* pDspData;
unsigned char* pRefData;
unsigned char* pColorData;
double *pDepthData;
/* show image */
#ifdef OPENCV_SHOW
#endif
using namespace cv;
using namespace std;
extern "C" {
IplImage *image_to_ipl(image im)
{
int x,y,c;
IplImage *disp = cvCreateImage(cvSize(im.w,im.h), IPL_DEPTH_8U, im.c);
int step = disp->widthStep;
for(y = 0; y < im.h; ++y){
for(x = 0; x < im.w; ++x){
for(c= 0; c < im.c; ++c){
float val = im.data[c*im.h*im.w + y*im.w + x];
disp->imageData[y*step + x*im.c + c] = (unsigned char)(val*255);
}
}
}
return disp;
}
image ipl_to_image(IplImage* src)
{
int h = src->height;
int w = src->width;
int c = src->nChannels;
image im = make_image(w, h, c);
unsigned char *data = (unsigned char *)src->imageData;
int step = src->widthStep;
int i, j, k;
for(i = 0; i < h; ++i){
for(k= 0; k < c; ++k){
for(j = 0; j < w; ++j){
im.data[k*w*h + i*w + j] = data[i*step + j*c + k]/255.;
}
}
}
return im;
}
Mat image_to_mat(image im)
{
image copy = copy_image(im);
constrain_image(copy);
if(im.c == 3) rgbgr_image(copy);
IplImage *ipl = image_to_ipl(copy);
Mat m = cvarrToMat(ipl, true);
cvReleaseImage(&ipl);
free_image(copy);
return m;
}
image mat_to_image(Mat m)
{
IplImage ipl = m;
image im = ipl_to_image(&ipl);
rgbgr_image(im);
return im;
}
void *open_video_stream(const char *f, int c, int w, int h, int fps)
{
VideoCapture *cap;
if(f) cap = new VideoCapture(f);
else cap = new VideoCapture(c);
if(!cap->isOpened()) return 0;
if(w) cap->set(CV_CAP_PROP_FRAME_WIDTH, w);
if(h) cap->set(CV_CAP_PROP_FRAME_HEIGHT, w);
if(fps) cap->set(CV_CAP_PROP_FPS, w);
return (void *) cap;
}
image get_image_from_stream(void *p)
{
//VideoCapture *cap = (VideoCapture *)p;
//*cap >> m;
//Mat m;
cv::Mat RefImg;
nCamMode = 0;
pCamPath = (char*) "192.168.80.10";
nStartFrmNo = 0;
nFlipMode = 0;
pCameraDriver = moNewCameraDriver(nCamMode, pCamPath, nStartFrmNo, nFlipMode);
string mat;
float BFBase[2];
moGetBFBase(pCameraDriver, BFBase);
#ifdef OPENCV_SHOW
RefImg = cv::Mat::zeros(MO_CAMERA_IMAGE_HEIGHT, MO_CAMERA_IMAGE_WIDTH, CV_8UC3);
#endif
cout<<"RefImg"<<RefImg;
pDepthData = (double*)malloc(MO_CAMERA_IMAGE_WIDTH*MO_CAMERA_IMAGE_HEIGHT*sizeof(double));
while(1)
{
if(0 != moGetNextFrameData(pCameraDriver, &nFrameNo, &ullTime, &pGPSData, &pImuData, &pColorData, &pRefData, &pDspData))
break;
memcpy(RefImg.data, pColorData, MO_CAMERA_IMAGE_WIDTH*MO_CAMERA_IMAGE_HEIGHT*3);
return mat_to_image(RefImg);
}
}
image load_image_cv(char *filename, int channels)
{
int flag = -1;
if (channels == 0) flag = -1;
else if (channels == 1) flag = 0;
else if (channels == 3) flag = 1;
else {
fprintf(stderr, "OpenCV can't force load with %d channels\n", channels);
}
Mat m;
m = imread(filename, flag);
if(!m.data){
fprintf(stderr, "Cannot load image \"%s\"\n", filename);
char buff[256];
sprintf(buff, "echo %s >> bad.list", filename);
system(buff);
return make_image(10,10,3);
//exit(0);
}
image im = mat_to_image(m);
return im;
}
int show_image_cv(image im, const char* name, int ms)
{
Mat m = image_to_mat(im);
imshow(name, m);
int c = waitKey(ms);
if (c != -1) c = c%256;
return c;
}
void make_window(char *name, int w, int h, int fullscreen)
{
namedWindow(name, WINDOW_NORMAL);
if (fullscreen) {
setWindowProperty(name, CV_WND_PROP_FULLSCREEN, CV_WINDOW_FULLSCREEN);
} else {
resizeWindow(name, w, h);
if(strcmp(name, "Demo") == 0) moveWindow(name, 0, 0);
}
}
}
#endif



 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享