

65,211
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享
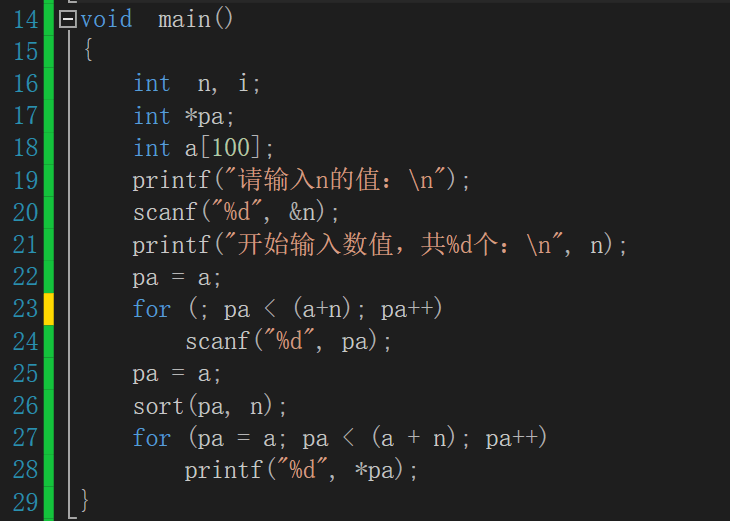


void SortArray(int * p, int n)
{
for (int i = 0; i < n - 1; i++)
{
for (int j = 0; j < n - 1 - i; j++)
{
if (p[j] < p[j + 1])
{
int temp;
temp = p[j];
p[j] = p[j + 1];
p[j + 1] = temp;
}
}
}
}




