STM32F103RET6中,选了这个,程序就不能正常运行。编译出来的目标代码还要大些。害人的东西。
体积小,所以小应用喜欢这个
27,521
社区成员
28,799
社区内容
加载中
试试用AI创作助手写篇文章吧


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享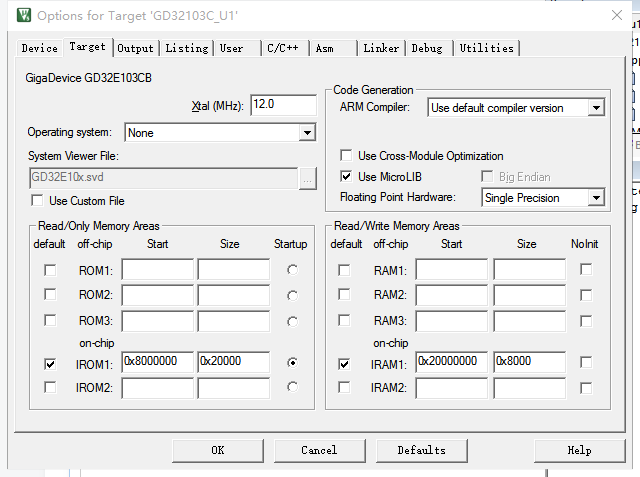



 选和不选在开发中几乎没什么区别吧?
或者说有没有什么要注意的,能否分享一下,多谢大神
选和不选在开发中几乎没什么区别吧?
或者说有没有什么要注意的,能否分享一下,多谢大神
