社区
单片机/工控
帖子详情
AVR模拟调试时发现内存重复占用,怎么回事及如何解决呢?
draught
2019-07-09 11:36:17
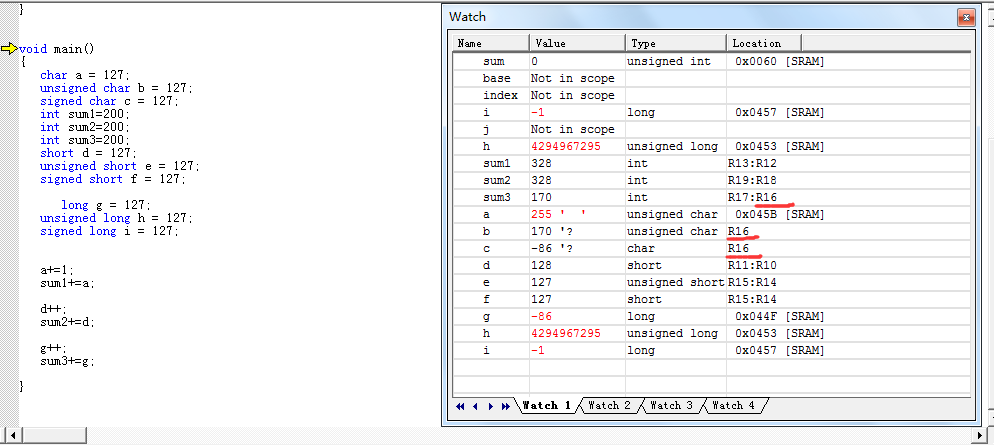
如图,调试时发现int sum3占用的内存是R17:R16, b和c又重复占用了R16,造成了b=170,c=-86,请问这个问题怎么解决呢?
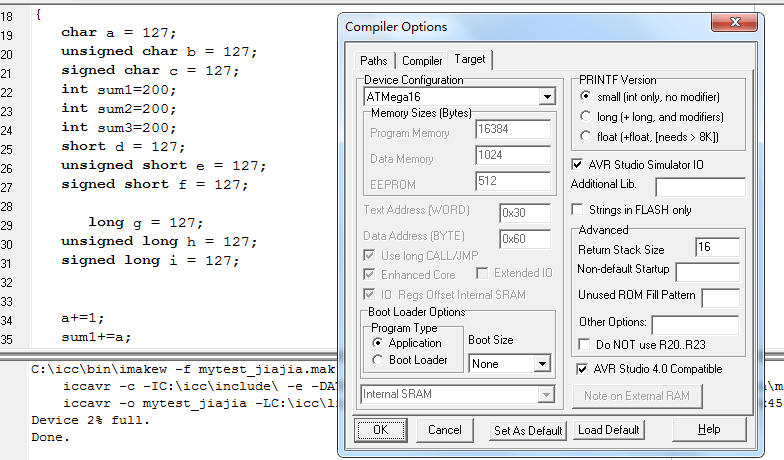
在ICC AVR里面我做的如下设置:
想不出来怎么回事,麻烦大侠帮下忙,学习啦
...全文
61
2
打赏
收藏
AVR模拟调试时发现内存重复占用,怎么回事及如何解决呢?
如图,调试时发现int sum3占用的内存是R17:R16, b和c又重复占用了R16,造成了b=170,c=-86,请问这个问题怎么解决呢? 在ICC AVR里面我做的如下设置: 想不出来怎么回事,麻烦大侠帮下忙,学习啦
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
2 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
draught
2019-07-09
打赏
举报
回复
嗯,试了一下,只赋值不调用的数据是随意存储的,有可能会被其他要调用的数据覆盖,当函数中需要调用这个数据时它才会被单独制定存储地址
dceacho
2019-07-09
打赏
举报
回复
无视就好了,这个一般是优化造成的,不会影响
最终结果
你可以把优化改到最低看看
基于
AVR
的单片嵌入式系统原理与实践应用
马潮老师编写的
avr
教材。 书中以m16为例举了实际应用的例子。 很不错。 书中片断 2.2 ATmega16单片机的组成 ATMEL公司的
AVR
单片机是一种基于增强RISC结构的、低功耗、CMOS技术、8位微控制器(Enhanced RISC Microcontroller),目前有Tiny、Mega两个系列50多种型号。它们的功能和外部的引脚各有不同,小到8-12个引脚,多到100个引脚,但它们内核的基本结构是一样的,指令系统相容。本书将以性能适中的ATmega16为主线,介绍和讲述
AVR
单片机的组成,以及如何应用在嵌入式系统中。在正式的产品开发与设计
时
,设计者可根据系统的实际需要选择合适型号的
AVR
单片机。 2.2.1 AV R单片机的内核结构 图 2-2
AVR
单片机的内核结构示意图 华东师范大学 电子科学技术系 马潮 2-4 基于
AVR
的单片嵌入式系统原理与实践应用 尽管
AVR
单片机系列有几十种的型号,但它们有着相同的内核结构,指令兼容。图2-2为典型的
AVR
单片机的内核结构图。 为了提高MCU并行处理的运行效率,
AVR
单片机采用了程序存储器和数据存储器使用不同的存储空间和存取总线的Harvard结构。算术逻辑单元(ALU)使用单级流水线操作方式对程序存储器进行访问,在执行当前一条指令的同
时
,也完成了从程序存储器中取出下一条将要执行指令的操作,因此执行一条指令仅需要一个
时
钟周期。 在
AVR
的内核中,由32个访问操作只需要一个
时
钟周期的8位通用工作寄存器组成了“快速访问寄存器组”。“快速访问”意味着在一个
时
钟周期内执行一个完整的ALU操作。这个ALU操作中包含三个过程:从寄存器组中取出两个操作数,操作数被执行,将执行结果写回目的寄存器中。这三个过程是在一个
时
钟周期内完成的,构成一个完整的ALU操作。 在32个通用工作寄存器中,有6个寄存器可以合并成为3个16位的,用于对数据存储器空间进行间接寻址的间接地址寄存器(存放地址指针),以实现高效的地址计算。这3个16位的间接地址寄存器称为:X寄存器,Y寄存器和Z寄存器。其中Z寄存器还能作为间接寻址程序存储器空间的地址寄存器,用于在Flash程序存储器空间进行查表等操作。
AVR
的算术逻辑单元(ALU)支持寄存器之间,立即数与寄存器之间的算术与逻辑运算功能,以及单一寄存器操作。每一次运算操作的结果将影响和改变状态寄存器(SREG)的值。 使用条件转移、无条件转移和调用指令,可以直接访问全部Flash程序存储器空间以及控制程序的执行顺序。大部分
AVR
指令为单一16位格式,只有少数指令为32位格式。因此,
AVR
的程序存储器单元为16位,即每个程序地址(两字节地址)单元存放一条单一的16位指令字。而一条32位的指令字,则要占据2个程序存储器单元。 ATmega16单片机的Flash程序存储器空间可以分成两段:引导程序段(Boot program section)和应用程序段(Application program section)。两个段的读写保护可以分别通过设置对应的锁定位(Lock bits)来实现。在引导程序段内驻留的引导程序中,可以使用SPM指令,实现对应用程序段的写操作(实现在应用自编程IAP功能,使系统能够自己更新系统程序)。 在响应中断服务和子程序调用过程
时
,程序计数器PC中的返回地址将被存储于堆栈之中。堆栈空间将
占用
数据存储器(SRAM)中一段连续的地址。因此,堆栈空间的大小仅受到系统总的数据存储器(SRAM)的大小以及系统程序对SRAM的使用量的限制。用户程序应在系统上电复位后,对一个16位的堆栈指针寄存器SP进行初始化设置(或在子程序和中断程序被执行之前)。 在
AVR
中,所有的存储器空间都是线性的。数据存储器(SRAM)可以通过5种不同的寻址方式进行访问。
AVR
的中断控制由I/O寄存器空间的中断控制寄存器和状态寄存器中的全局中断允许位组成。每个中断都分别对应一个中断向量(中断入口地址)。所有的中断向量构成了中断向量表,该中断向量表位于Flash程序存储器空间的最前面。中断的中断向量地址越小,其中断的优先级越高。 I/O空间为连续的64个I/O寄存器空间,它们分别对应MCU各个外围功能的控制和数据寄存器地址,如控制寄存器、定
时
器/计数器、A/D转换器及其他的I/O功能等。I/O寄存器空间可使用I/O寄存器访问指令直接访问,也可将其映射为通用工作寄存器组后的数据存储器空间,使用数据存储器访问指令进行操作。I/O寄存器空间在数据存储器空间的映射地址为 $020~$05F。
AVR
单片机的性能非常强大,所以它的内部结构相对8031结构的单片机要复杂。对于刚开始接触和学习单片机的人员,以及了解8051结构单片机的人来讲,在这里尽管不会马上理解
AVR
内核的全部特点,但通过以后的逐步学习,应逐渐深入的体会和掌握它的原理, 华东师范大学 电子科学技术系 马潮 2-5 第 2 章
AVR
单片机的基本结构 这对于熟练的应用
AVR
设计开发产品,以及将来学习使用更新的单片机都会有很大的帮助。技术是在不断的发展的。 2.2.2 典型
AVR
芯片ATmega16特点
AVR
系列单片机中比较典型的芯片是ATmega16。这款芯片具备了
AVR
系列单片机的主要的特点和功能,不仅适合应用于产品设计,同
时
也方便初学入门。其主要特点有: (1)采用先进RISC结构的
AVR
内核 131条机器指令,且大多数指令的执行
时
间为单个系统
时
钟周期; 32个8位通用工作寄存器; 工作在16MHz
时
具有16MIPS的性能。 配备只需要2个
时
钟周期的硬件乘法器 (2)片内含有较大容量的非易失性的程序和数据存储器 16K字节在线可编程(ISP)Flash程序存储器(擦除次数>1万次),采用Boot Load技术支持IAP功能; 1K字节的片内SRAM数据存储器,可实现3级锁定的程序加密; 512个字节片内在线可编程EEPROM数据存储器(寿命>10万次); (3)片内含JTAG接口 支持符合JTAG标准的边界扫描功能用于芯片检测; 支持扩展的片内在线
调试
功能 可通过JTAG口对片内的Flash、EEPROM、配置熔丝位和锁定加密位实施下载编程; (4)外围接口 2个带有分别独立、可设置预分频器的8位定
时
器/计数器; 1个带有可设置预分频器、具有比较、捕捉功能的16位定
时
器/计数器; 片内含独立振荡器的实
时
时
钟RTC; 4路PWM通道; 8路10位ADC 面向字节的两线接口TWI(兼容I2C硬件接口); 1个可编程的增强型全双工的,支持同步/异步通信的串行接口USART; 1个可工作于主机/从机模式的SPI串行接口(支持ISP程序下载); 片内
模拟
比较器; 内含可编程的,具有独立片内振荡器的看门狗定
时
器WDT; (5)其它的特点 片内含上电复位电路以及可编程的掉电检测复位电路BOD; 片内含有1M/2M/4M/8M,经过标定的、可校正的RC振荡器,可作为系统
时
钟使用; 多达21个各种类型的内外部中断源; 有6种休眠模式支持省电方式工作; (6)宽电压、高速度、低功耗 工作电压范围宽:ATmega16L 2.7—5.5v,ATmega16 4.5—5.5v; 运行速度:ATmega16L 0—8M,ATmega16 0—16M; 低功耗:ATmega16L工作在1MHz、3v、25度
时
的典型功耗为,正常工作模式 1.1mA,空闲工作模式 0.35mA,掉电工作模式 <1uA; (7)芯片引脚和封装形式 ATmega16共有32个可编程的I/O口(脚),芯片封装形式有40引脚的PDIP、44引脚的TQFP和44引脚的MLF封装。 华东师范大学 电子科学技术系 马潮 2-6 基于
AVR
的单片嵌入式系统原理与实践应用 2.2.3 外部引 脚与封装 ATmega16单片机有三种形式的封装:40脚双列直插PDIP、44脚方形的TQFP和MLF形式(贴片形式)。其外部引脚封装如图2-3所示。 图2-3 ATmage16 外部引脚与封装示意图 其中,各个引脚的功能如下: (1)电源、系统晶振、芯片复位引脚 Vcc: 芯片供电(片内数字电路电源)输入引脚,使用
时
连接到电源正极。 AVcc:为端口A和片内ADC
模拟
电路电源输入引脚。不使用ADC
时
,直接连接到电源正极;使用ADC
时
,应通过一个低通电源滤波器与Vcc连接。 AREF:使用ADC
时
,可作为外部ADC参考源的输入引脚。 GND: 芯片接地引脚,使用
时
接地。 XTAL2:片内反相振荡放大器的输出端。 XTAL1:片内反相振荡放大器和内部
时
钟操作电路的输入端。 RESET:RESET为芯片复位输入引脚。在该引脚上施加(拉低)一个最小脉冲宽度为1.5us的低电平,将引起芯片的硬件复位(外部复位)。 (2)32根 I/O引脚,分成PA、PB、PC和PD四个8位端口,他们全部是可编程控制的双(多)功能复用的I/O引脚(口)。 四个端口的第一功能是通用的双向数字输入/输出(I/O)口,其中每一位都可以由指令设置为独立的输入口,或输出口。当I/O设置为输入
时
,引脚内部还配置有上拉电阻,这个内部的上拉电阻可通过编程设置为上拉有效或上拉无效。 如果
AVR
的I/O口设置为输出方式工作,当其输出高电平
时
,能够输出20mA的电流,而当其输出低电平
时
,可以吸收40mA的电流。因此
AVR
的I/O口驱动能力非常强,能够直接驱动LED发光二极管、数码管等。而早期单片机I/O口的驱动能力只有5mA,驱动LED
时
,还需要增加外部的驱动电路和器件。 芯片Reset复位后,所有I/O口的缺省状态为输入方式,上拉电阻无效,即I/O为输入高阻的三态状态。 以上我们简单介绍了ATmega16单片机的主要特性以及引脚封装。可以看出,小小的一 华东师范大学 电子科学技术系 马潮 2-7 第 2 章
AVR
单片机的基本结构 块芯片,其内部的组成结构却是相当复杂的。也正式这种复杂,加上多样的程序,才使得单片机在实际应用中变化无穷。 下面,我们从ATmega16的内部结构出发,逐步的介绍它的工作原理和使用方法。 2.3 ATmega16内部结构 图2-4 ATmage16 的结构框图 华东师范大学 电子科学技术系 马潮 2-8 基于
AVR
的单片嵌入式系统原理与实践应用 图2-4是ATmage16 的结构框图。它是在
AVR
内核(图2-3)的基础上,具体化的一个实例。从图中可以看出,ATmega16内部的主要构成部分有:
电子设计大赛——单主控MCU的选择.doc
选型关键: 1. 基本资源(SDRAM,接口,速度)对于完成课题是否够用 2. 系统稳定性(内部晶振是否稳定,要加外部晶振,又会稳定吗?)和是否方便上手(我 们是否有相关软件及模块子程序) 3. IO口等中断及接口外设是否充足 近几年提倡低功耗,所以是要在这个方面下点功夫。我想应该从以下几个方面去考虑这 个问题: 1. 基本资源是否够用?很多学生都很熟悉AT89S系列单片机,常用、比较容易买到的是AT8 9S51/AT89S52,但是这个两个型号的单片机RAM偏少,只有128/256字节(一般不建议在单片 机外部扩展
内存
,因为其连线太多,外部RAM存取速度也会慢些)。如果在比赛中需要建立 大一点的数组,可能就会受到限制,而比赛期间
时
间比较紧张,很难写出效率高、
占用
内存
少的代码,如果遇到RAM溢出,那将是很大的麻烦。而且这两个型号的单片机其他硬件资源 也比较少,只有串口和IO口。如要连接EEPROM则需要通过软件来
模拟
IIC或SPI总线,速度 慢。而且不带内部AD(有些地方对AD的速度要求不高可以用单片机内部的AD(比如小车上 的AD),因为连线方便),同
时
还不支持硬件仿真(只能用别的单片机来仿,仿真
时
占用
串口 和一个定
时
器)。 2. 性能怎么样?这是一个很实际的问题。我们参加电子设计大赛的作品都是由手工焊接出 来的,很多地方就是用线连在万能焊接板上,如果性能不可靠将会出现晶振不起振,数据线 长了传送的数据就不对,而且容易被静电打坏,这些都将直接影响你的比赛进度,有些单片 机速度慢,数据处理能力差,也会影响到赛场的发挥.而且有些地方还需要考虑单片机的功 耗等 3. 开发流程与平台是否简单、容易上手?很多学生学的是51单片机,觉得它速度慢、资源少 ,于是决定在比赛前重新学一款新的控制器,但是有个问题你要首先要考虑:开发平台要 简单,参考资源要多,能否在短期内掌握内部资源的操作.开发工具是否昂贵,比如dsp的开 发工具一般都比较贵,因而很少有学生使用DSP来做开发,而且DSP本身参考资料不是很多 . 经过以上比较,我推荐以下几种CPU并作相关说明: 1. LPC2138 这个CPU比较贵,但是为了比赛准备两片也是值得的,他的RAM很大,比如你做2007年的A题 (音频信号分析仪)就非常需要这个芯片,32K的RAM,带有AD,该题的要求是20Hz的分辨率 ,5S的分析
时
间,只要多采点数据,做到10Hz的分辨率都没有问题,但是很多学生就是因 为选用了常见的51,M16(网上有这个单片机的FFT代码,但是点数很少,而且是汇编代码 的,很多学生改起来比较困难)等单片机,这些单片机自带的RAM不够,51单片机没有硬件 乘法器。有部分学生用51单片机做,外扩了RAM、AD,还挂了个LCD,连线复杂,可靠性很低 ,到了测试的
时
候很可能会出现意外(这里要友情提醒一下,你们的比赛作品在上交的
时
候 ,装到盒子中
时
一定要垫上一定的海绵,泡沫或者碎纸,以免运输过程中损坏),比如启动不 了了。而选择LPC2138的话 ,它本身自带AD,带大容量的RAM,这样,只要在外部接
模拟
调理电路和LCD就可以搞定硬件 了,其他就是软件编程,处理速度不需要担心,你可以使用60M的主频,带硬件乘法器。 大容量的RAM和FLASH对于需要移植操作系统和GUI的作品更是适用。该芯片可以用KEIL( 你们应该很熟悉了)开发,用USB接口的
调试
工具,支持硬件仿真,开发工具便宜(推荐使 用智林的ULINK或者Jlink)。比赛前需要做好最小系统的板子。 2. STM32F103RB 他的好处与LPC2138差不多,但是资料更多些,而且提供了一些算法库(FFT,PID),这个算法 库是很有用的,因为让你用汇编去写这个是不现实的,自己用C语言写的效率也很低,有了 这些你就可以直接调用了,而且STM32F103是Ctecx- M3的内核,速度会比ARM7快,效率也有所提高.带实
时
时
钟、串口、SPI接口、IIC接口、A D等常用外设.但寄存器设置会比LPC2138麻烦点.,其开发工具类型很多(推荐使用智林 的ULINK或者Jlink),一般价格都比较便宜。比赛前也需要做好最小系统的板子。 3. ATMEGA32单片机,在
AVR
单片机里这个单片机资源适中,2K的RAM,做一般的题目应该是 够的,32K的FLASH也足够了,一般比赛过程中是写不了那么大的代码的,除非之前移植 好了操作系统、GUI等东西在里面。其资源要比普通51单片机多很多,自带的AD,在非高 速数据采集类的题目中一般是够用了,很多业余爱好者很喜欢用
AVR
单片机,其开发工具 可以自己制作或者购买,仿真器会贵一点。
AVR
的型号很多,但是只要稍作修改就可以通 用,相关网站和资料很多,自学起来应该比较方便。 4. 有些学生接触单片机比
ARM 嵌入式LINUX 系统构建与驱动开发
一 首先说说ARM的发展 可以用一片大好来形容,翻开各个公司的网站,招聘里面嵌入式占据了大半工程师职位。 广义的嵌入式无非几种:传统的什么51、
AVR
、PIC称做嵌入式微控制器;ARM是嵌入式微处理器;DSP;FPGA。 客观的讲,工作需求量上DSP的需求比ARM要多,而ARM和FPGA差不多。 DSP因为数字处理与通信领域的空前发展而火暴,小到MP3 射象头,大到我们军品里的控制器,应用面很广。 FPGA的兄弟一般做ANSIC(特殊芯片设计,好象是这么翻译的)。 而ARM单纯说来并不比一个单片机强多少,但是它的独特就在于不断下降的价格和提升的性能。这完全依靠于ARM公司的战略,厉害!!很佩服他们的战略眼光!! 值得注意的是:在找工作中,企业(著名的,小的不算)对单纯的ARM硬件开发工程师并不比单片机重视,很少有大企业的职位里写“从事过ARM开发优先”。 写的多的是什么?“嵌入式LINUX” 到这相信大家看出来了吧,需要的是硬件中的软件。 二 ARM是硬件还是软件 很难说,ARM是硬件,LINUX是软件。 ARM的硬件多半已经模块化了,像我这样把板子改成这样的就算动的多的了,这同样是ARM公司的战略,再次佩服。 实际中的LINUX的开发工作更多,更耗
时
。从这方面说ARM应该算是软件了。 在找工作中更是这样,举个例子,联想里和ARM最接近的是“BIOS工程师”是软件,MOTO里接近的是嵌入式LINUX工程师是软件。而其他很多公司把嵌入式产品开发归为硬件。 所以,不要讨论这个,好好玩转自己的板子才是关键。实在不爽你就把自己叫“嵌入式开发工程师” 三 要不要买开发板 买哪家 我的答案是“在你个人的学习方*”,但是如果看家是需要看这骗笔记的水平,个人推荐还是买现成的。 1 买 买板子可以把注意力集中在软件开发上,软件开发(尤其是驱动)可以不必担心自己硬件上的问题,我就是以便
调试
一边写驱动和程序,每次写驱动前就要先确认硬件没问题。 另外,买板子更省钱和
时
间,我自己做的板子,原理图PCB花了2周以上!制版又15天,回来以后焊接44B0 160个脚!那叫一个麻烦~~花了多少钱呢?2层板,制版费就300块!当然 我把接口都外引了,还做了个20X18的LCD背板,板子比较大。 总体下来 元件+LCD屏+PCB=11XX块!够2410的了。 再有就是买的资料相对来说比较全,但是不要指望有技术支持!都是骗人的,卖你之后就不会理你。 2 做 自己做可以更了解底层硬件,可以按照自己的要求加东西,比如我就加了GPS模块、 GPRS模块 、SD卡模块,扩了个IIC的35个键子的键盘、把LCD接口按照买的LCD改装了,可以用FPC线直接连接。做的很爽的。玩一把吗。 当然,你可以有策略的做,比如像我一样,把RAM和ROM,网络都保持和某现成的板子一样,这样他们的资料你就可以拿过来直接用,给自己留个退路。其他的如SD了 什么的自己做。都达到了~~就是费钱,费
时
间。 再有就是给做的朋友几点建议:尽量拿到现成的板子,尽量多搜集其他板子的全套资料,一定要拿到一张没问题的原理图。 网上流传的原理图多数是龚俊03年画的,再这里对龚俊表达一下我的敬意!!牛人! 但是那个图有个小BUG,我指的是03版的,后来的没这问题了。8019那地址线和地址有问题。还有人仿照他的PDF图画的SCH,更是漏洞百出!谴责!顺便谴责把龚俊板子偷卖的人。 3 买哪家 个人感觉分3类吧 1)首先是ZLG的,资料非常的全,感觉他是真正想教你怎么开发ARM,而不是像有的公司自己技术都没做好就做个板子出来卖钱。但是最大的不利就是价格太贵!而且主要是PHILIP的,货源比较麻烦~~可能有人说21XX系列的不贵啊,那是总线不外扩的,只能跑UCOS,不能跑UCLINUX。但是说是话,21XX系列才是ARM7的价格性能结合点。ARM7最适合做工业控制,ARM普及,销量都是怎么来的?都是ARM7来的,而44B0是典型的商业片子。但是,这里如果你看中的是为工作做准备,还是选能跑UCLINUX的吧。 但是仍然作为第一个推荐,因为菜鸟
时
期,合适的资料太重要了!!在这里被ZLG的务实*感动!你看人家那代码写的。 2)感觉立宇泰的44B0不错 硬件没别的,就是资料比较全的说,不像有些家,原理图直接拿人家的,还错的~~ 3)找个最便宜的 好象最便宜的有卖350的吧?也是没别的,就是即省了钱 还省
时
间搜集资料,至于资料全不全,别计较了~~硬件肯定好使就行吧。 四 要不要有51
AVR
等单片机基础 有更好,但没有也无所谓。 两个月以前,我只是看别人做,耳濡目染~~,本科学过单片机,从来没做过。我们这的技术主干做
AVR
和51,我就跟他们调过C语言程序。你看出来了?我是个不折不扣的菜鸟吧? 但是做这个之前我特意找了ZLG
c语言编写单片机技巧
1. C语言和汇编语言在开发单片机
时
各有哪些优缺点? 答:汇编语言是一种用文字助记符来表示机器指令的符号语言,是最接近机器码的一种语言。其主要优点是
占用
资源少、程序执行效率高。但是不同的CPU,其汇编语言可能有所差异,所以不易移植。 C语言是一种结构化的高级语言。其优点是可读性好,移植容易,是普遍使用的一种计算机语言。缺点是
占用
资源较多,执行效率没有汇编高。 对于目前普遍使用的RISC架构的8bit MCU来说,其内部ROM、RAM、STACK等资源都有限,如果使用C语言编写,一条C语言指令编译后,会变成很多条机器码,很容易出现ROM空间不够、堆栈溢出等问题。而且一些单片机厂家也不一定能提供C编译器。而汇编语言,一条指令就对应一个机器码,每一步执行什幺动作都很清楚,并且程序大小和堆栈调用情况都容易控制,
调试
起来也比较方便。所以在单片机开发中,我们还是建议采用汇编语言比较好。 如果对单片机C语言有兴趣,HOLTEK-p.htm" target="_blank" title="HOLTEK货源和PDF资料">HOLTEK的单片机就有提供C编译器,可以到HOLTEK-p.htm" target="_blank" title="HOLTEK货源和PDF资料">HOLTEK的网站(www.holtek.com.cn )免费下载使用。 2. C或汇编语言可以用于单片机,C++能吗? 答:在单片机开发中,主要是汇编和C,没有用C++的。 3. 搞单片机开发,一定要会C吗? 答:汇编语言是一种用文字助记符来表示机器指令的符号语言,是最接近机器码的一种语言。其主要优点是
占用
资源少、程序执行效率高。但是不同的CPU,其汇编语言可能有所差异,所以不易移植。 对于目前普遍使用的RISC架构的8bit MCU来说,其内部ROM、RAM、STACK等资源都有限,如果使用C语言编写,一条C语言指令编译后,会变成很多条机器码,很容易出现ROM空间不够、堆栈溢出等问题。而且一些单片机厂家也不一定能提供C编译器。而汇编语言,一条指令就对应一个机器码,每一步执行什么动作都很清楚,并且程序大小和堆栈调用情况都容易控制,
调试
起来也比较方便。所以在资源较少单片机开发中,我们还是建议采用汇编语言比较好。 而C语言是一种编译型程序设计语言,它兼顾了多种高级语言的特点,并具备汇编语言的功能。C语言有功能丰富的库函数、运算速度快、编译效率高、有良好的可移植性,而且可以直接实现对系统硬件的控制。C语言是一种结构化程序设计语言,它支持当前程序设计中广泛采用的由顶向下结构化程序设计技术。此外,C语言程序具有完善的模块程序结构,从而为软件开发中采用模块化程序设计方法提供了有力的保障。因此,使用C语言进行程序设计已成为软件开发的一个主流。用C语言来编写目标系统软件,会大大缩短开发周期,且明显地增加软件的可读性,便于改进和扩充,从而研制出规模更大、性能更完备的系统。 综上所述,用C语言进行单片机程序设计是单片机开发与应用的必然趋势。所以作为一个技术全面并涉足较大规模的软件系统开发的单片机开发人员最好能够掌握基本的C语言编程。 4. 当开发一个较复杂而又开发
时
间短的项目
时
,用C还是用汇编开发好? 答:对于复杂而开发
时
间紧的项目
时
,可以采用C语言,但前提是要求对该MCU系统的C语言和C编译器非常熟悉,特别要注意该C编译系统所能支持的数据类型和算法。虽然C语言是最普遍的一种高级语言,但不同的MCU厂家其C语言编译系统是有所差别的,特别是在一些特殊功能模块的操作上。如果对这些特性不了解,那
调试
起来就有的烦了,到头来可能还不如用汇编来的快。 5. 在教学中要用到8088和196芯片单片机教材,请问那里可以找到关于这方面的书或资料? 答:有关这方面的教材,大学里常用的一本是《IBM-PC汇编语言程序设计》清华大学出版社出版的,在网上以及书店都是可以找到的,另外网上还可以搜索到很多其他的教材如:《微机原理及汇编语言教程》(杨延双 张晓冬 等编著 )和《16/32 位微机原理、汇编语言及接口技术》(作者: 钟晓捷 陈涛 ,机械工业出版社 出版)等,可以在较大型的科技书店里查找或者直接从网上订购。 6. 初学者到底是应该先学C还是汇编? 答:对于单片机的初学者来说,应该从汇编学起。因为汇编语言是最接近机器码的一种语言,可以加深初学者对单片机各个功能模块的了解,从而打好扎实的基础。 7. 我是一名武汉大学电子科技大3的学生,学了电子线路、数字逻辑、汇编和接口、C语言,但是总是感觉很迷茫,觉好象什么都不会。怎么办? 答:大学过程是一个理论过程,实践的机会比较少,往往会造成理论与实践相脱节,这是国内大学教育系统的通病,不过对于学生来说切不可好高骛远。一般从大三会开始接触到一些专业课程,电子相关专业会开设相关的单片机应用课程并且会有简单的实验项目,那么要充分把握实验课的机会,多多地实际上机操作练习。平
时
可以多看看相关的电子技术杂志网站,看看别人的开发经验,硬件设计方案以及他人的软件设计经验。有可能的话,还可以参加一些电子设计大赛,借此机会2--3个人合作做一个完整系统,会更有帮助。到了大四毕业设计阶段,也可以选择相关的课题作些实际案例增长经验。做什么事情都有个经验的积累过程,循序渐进。 8. 请问作为学生,如何学好单片机? 答:学习好单片机,最主要的是实践,在实践中增长经验。在校学生的话,实践机会的确会比较少,但是有机会的话,可以毕业实习选择相关的课题,这样就可以接触到实际的项目。而且如果单片机微机原理是一门主课的话,相信学校会安排比较多的实践上机机会。有能力的话,可以找一些相关兼职工作做做,会更有帮助。而且单片机开发应用需要软硬件结合,所以不能只满足于编程技巧如何完美,平
时
也要注意硬件知识的积累,多上上电子论坛网站,买一些相关杂志。可能的话,可以到ic37去买一些小零件,自己搭一个小系统让它工作起来。 HOTLEK的单片机是RISC结构的8位单片机,它可以广泛应用在家用电器、安全系统、掌上游戏等方面。大概来说可以分成I/O型单片机、LCD型单片机、A/D型单片机、A/D with LCD型单片机等等。这些单片机的中文资料我们都公开在HOLTEK-p.htm" target="_blank" title="HOLTEK货源和PDF资料">HOLTEK网站www.holtek.com.cn 。 HOLTEK-p.htm" target="_blank" title="HOLTEK货源和PDF资料">HOLTEK各类单片机的使用手册下载地址: http://www.holtek.com.cn/referanc/htk_book.htm HOLTEK-p.htm" target="_blank" title="HOLTEK货源和PDF资料">HOLTEK单片机软件/硬件应用范例下载地址: http://www.holtek.com.cn/tech/appnote/appnote.htm HOLTEK-p.htm" target="_blank" title="HOLTEK货源和PDF资料">HOLTEK单片机支持工具下载地址: http://www.holtek.com.cn/tech/tool/tool.htm 9. 如何才能才为单片机的高手啊? 答:要成为单片机高手,应该多实践,
时
常关注单片机的发展趋势;经常上一些相关网站,从那里可以找到许多有用的资料。 10. 女性是否适合单片机软件编程这个行业? 答:要根据自己的兴趣,配合自己对软件编程的耐性,男女皆适合这个行业。 11. Holtek的数据手册在哪里下载? 答:如果对Holtek的IC感兴趣的话,相应的数据手册可以到网站上http://www.holtek.com.cn/products/index.htm去选IC资料下载。 12. 8位机还能延续多久! 答:以现在MCU产品主力还是在8位领域,主要应用于汽车应用、消费性电子、电脑及PC周边、电信与通讯、办公室自动化、工业控制等六大市场,其中车用市场多在欧、美地区,而亚太地区则以消费性电子为主, 并以量大低单价为产品主流,目前16位MCU与8位产品,还有相当幅度的价差,新的应用领域也仍在开发,业界预计,至少在2005年前8位的MCU仍是MCU产品的主流。 13. 学习ARM及嵌入式系统是否比学习其它一般单片机更有使用前景?对于一个初学者应当具备哪些相关知识? 答:一般在8位单片机与ARM方面的嵌入式系统是有层次上的差别,ARM适用于系统复杂度较大的高级产品,如PDA、手机等应用。而8位单片机因架构简单,硬件资源相对较少,适用于一般的工业控制、消费性家电等等。对于一个单片机方面的软件编程初学者,应以HOLTEK-p.htm" target="_blank" title="HOLTEK货源和PDF资料">HOLTEK系列或8051等8位单片机来做入门练习。而初学者应当具备软件编程相关知识,单片机一般软件编程是以汇编语言为主,各家有各家的语法,但大都以RISC的MCU架构为主,其中 RISC (Reduced Instruction Set Computer) 代表MCU的所有指令。都是利用一些简单的指令组成的,简单的指令代表 MCU 的线路可以尽量做到最佳化,而提高执行速率。另外初学者要具备单片机I/O接口的应用知识,这在于周边应用电路及各种元器件的使用,须配合自己所学的电子学及电路学等。 14. 符合44PIN的80系列8位单片机的MCU有哪些? 答:符合44PIN的80系列8位单片机有Z8674312FSC、Z86E2112FSC、Z86E2116FSC。 15. 请介绍一下MCU的测试方法。 答: MCU从生产出来到封装出货的每个不同的阶段会有不同的测试方法,其中主要会有两种:中测和成测。 所谓中测即是WAFER的测试,它会包含产品的功能验证及AC、DC的测试。项目相当繁多,以HOLTEK-p.htm" target="_blank" title="HOLTEK货源和PDF资料">HOLTEK产品为例最主要的几项如下: 接续性测试:检测每一根I/OPIN内接的保护用二极管是否功能无误。 功能测试:以产品设计者所提供测试资料(TEST PATTERN)灌入IC,检查其结果是否与当
时
SIMULATION
时
状态一样。 STANDBY电流测试:测量IC处于HALT模式
时
即每一个接点(PAD)在1态0态或Z态保持不变
时
的漏电流是否符合最低之规格。 耗电测试:整颗IC的静态耗电与动态耗电。 输入电压测试:测量每个输入接脚的输入电压反应特性。 输出电压测试:测量每个输出接脚的输出电压位准。 相关频率特性(AC)测试,也是通过外灌一定频率,从I/O口来看输出是否与之匹配。 为了保证IC生产的长期且稳定品质,还会做产品的可靠性测试,这些测试包括ESD测试,LATCH UP测试,温度循环测试,高温贮存测试,湿度贮存测试等。 成测则是产品封装好后的测试,即PACKAGE测试。即是所有通过中测的产品封装后的测试,方法主要是机台自动测试,但测试项目仍与WAFER TEST相同。PACKAGE TEST的目的是在确定IC在封装过程中是否有任何损坏。 16. 能否利用单片来检测手机电池的充放电
时
间及充放电
时
的电压电流变化,并利用一个I/O端口使检测结果在电脑上显示出来? 答:目前市场上的各类智能充电器,大部分都采用MCU进行充电电流和电压的控制。至于要在电脑上显示,好象并不实用,可能只有在一些专门的电池检测仪器中才会用到;对于一般的手机用户来说,谁会在充电
时
还需要用一台电脑来做显示呢?要实现单片机与电脑的连接,最简单的方式就是采用串口通讯,但需要加一颗RS-232芯片。 17. 在ARM编程中又应当如何? 答:就以嵌入式系统观念为例,一般嵌入式处理器可以分为三类:嵌入式微处理器、嵌入式微控制器、嵌入式DSP(Digital Signal Processor)。 嵌入式微处理器就是和通用计算机的微处理器对应的CPU。在应用中,一般是将微处理器装配在专门设计的电路板上,在母板上只保留和嵌入式相关的功能即可,这样可以满足嵌入式系统体积小和功耗低的要求。目前的嵌入式处理器主要包括:PowerPC、Motorola 68000、ARM系列等等。 嵌入式微控制器又称为单片机,它将CPU、存储器(少量的RAM、ROM或两者都有)和其它接口I/O封装在同一片集成电路里。常见的有HOLTEK-p.htm" target="_blank" title="HOLTEK货源和PDF资料">HOLTEK MCU系列、Microchip MCU系列及8051等。 嵌入式DSP专门用来处理对离散
时
间信号进行极快的处理计算,提高编译效率和执行速度。在数字滤波、FFT(Fast Fourier Transform)、频谱分析、图像处理的分析等领域,DSP正在大量进入嵌入式市场。 18. MCU在射频控制
时
,MCU的
时
钟(晶振)、数据线会辐射基频或基频的倍频,被低噪放LNA放大后进入混频,出现带内的Spur,无法滤除。除了用layout、选择低辐射MCU的方法可以减少一些以外,还有什么别的方法? 答:在设计高频电路用电路板有许多注意事项,尤其是GHz等级的高频电路,更需要注意各电子组件pad与印刷pattern的长度对电路特性所造成的影响。最近几年高频电路与数位电路共享相同电路板,构成所谓的混载电路系统似乎有增加的趋势,类似如此的设计经常会造成数位电路动作
时
,高频电路却发生动作不稳定等现象,其中原因之一是数位电路产生的噪讯,影响高频电路正常动作所致。为了避免上述问题除了设法分割两电路block之外,设计电路板之前充分检讨设计构想,才是根本应有的手法,基本上设计高频电路用电路板必需掌握下列三大原则: 高质感。 不可取巧。 不可仓促抢
时
间。 以下是设计高频电路板的一些建议: (1)印刷pattern的长度会影响电路特性。尤其是传输速度为GHz高速数位电路的传输线路,通常会使用strip line,同
时
藉由调整配线长度补正传输延迟
时
间,其实这也意味着电子组件的设置位置对电路特性具有绝对性的影响。 (2)Ground作大better。铜箔面整体设置ground层,而连接via的better ground则是高频电路板与高速数位电路板共同的特征,此外高频电路板最忌讳使用幅宽细窄的印刷pattern描绘ground。 (2)电子组件的ground端子,以最短的长度与电路板的ground连接。具体方法是在电子组件的ground端子pad附近设置via,使电子组件能以最短的长度与电路板的ground连接。 (3)信号线作短配线设计。不可任意加大配线长度,尽量缩短配线长度。 (4)减少电路之间的结合。尤其是filter与amplifier输出入之间作电路分割非常重要,它相当于audio电路的cross talk对策。 (5)MCU回路Layout考量:震荡电路仅可能接近IC震荡脚位;震荡电路与VDD & VSS保持足够的距离;震荡频率大于1MHz
时
不需加 osc1 & osc2 电容;电源与地间要最短位置并尽量拉等宽与等距的线,于节点位置加上104/103/102等陶瓷电容。 19. Intel系列的96单片机80c196KB开发系统
时
,都有那些注意事项? 答:一个即
时
系统的软体由即
时
操作系统加上应用程序构成。应用程序与作业系统的接口通过系统调用来实现。用80C196KB-p.htm" target="_blank" title="80C196KB货源和PDF资料">80C196KB作业系统的MCU,只能用内部RAM作为TCB和所有系统记忆体(含各种控制表)以及各个任务的工作和资料单元。因此一定要注意以下几点: (1)对各个任务分配各自的堆迭区,该堆迭区既作为任务的工作单元,也作为任务控制块的保护单元。 (2)系统的任务控制块只存放各任务的堆迭指标,而任务的状态均存放于任务椎栈中。在一个任务退出运行
时
,通过中断把它的状态进栈,然后把它的堆迭指标保存于系统的TCB中;再根据优先取出优先顺序最高的已就绪任务的堆迭指标SP映象值送入SP中;最后执行中断返回指令转去执行新任务。 (3)各任务的资料和工作单元尽量用堆迭实现,这样可以允许各任务使用同一个子程序。使用堆迭实现参数传递并作为工作单元,而不使用绝对地址的RAM,可实现可重入子程序。该子程序既可为各个任务所调用,也可实现递回调用。 20. 在demo板上采样电压
时
,不稳定,采样结果有波动,如何消除? 答:一般来说,仿真器都是工作在一个稳压的环境(通常为5V)。如果用仿真器的A/D
时
,要注意其A/D参考电压是由仿真器内部给出,还是需要外部提供。A/D转换需要一个连续的
时
钟周期,所以在仿真
时
不能用单步
调试
的方法,否则会造成A/D采样值不准。至于A/D采样不稳定,可以在A/D输入口加一电容,起到滤波作用;在软件处理
时
采用中值滤波的方法。 21. 在车载DVD系统中,如何设计电子防震系统? 答:在车载DVD系统,最好选择高档DVD机,因为高档DVD机都采用电子防震系统(ADVANCEDESP),当记忆缓冲区内的读数降低,先进的电子防震设计会以双速读数系统,做出比正常速度快两倍的读数速率,以减低噪声,即使连续震荡仍可避免跳线情况出现,现在就说说什幺叫电子防震。简单地说:电子防震就是一个信号的储存--释放过程,首先CD要先把信号进行提前读取,也就是我们见到机子的加速,再把信号储存在RAM中,而我们在开防震的
时
候所听到的就是经过RAM的声音,这样就是它的过程。当没有防震
时
是由于信号是1比1读取的,所以当受到冲击后,就会出现跳音。而当开了防震
时
,机子受到冲击后,由RAM释放出来的声音使音乐不停地播放,而与此同
时
,光头迅速进行复位检索,当检索到信号后立即补充,所以不会出现跳音。大概的情况就是这样。但是这样还没有满足用家的要求,由于这种的方法带来的
时
间短,通常只有3秒,所以跳音的机会还是蛮高,如果增大RAM又带来造价的增高因为RAM这东西价格较贵,尤其是质量好的。 22. 在电子防震技术中,有那些IC或器件可供选择? 答:在电子防震技术中,最重要的技术之一要数是RAM技术,而一直以来都是因为它的成本问题,所以防震
时
间都一直不能增加,也就是说RAM本身就有限制,RAM的容量越大,造价就越高。而许多厂家就如何在RAM的限制里得到最大限度的记忆
时
间展开了开发研究。 23. 如何进行编程可以减少程序的bug? 答:在此提供一些建议,因系统中实际运行的参数都是有范围的。系统运行中要考虑的超范围管理参数有: 物理参数。这些参数主要是系统的输入参数,它包括激励参数、采集处理中的运行参数和处理结束的结果参数。合理设定这些边界,将超出边界的参数都视为非正常激励或非正常回应进行出错处理。 资源参数。这些参数主要是系统中的电路、器件、功能单元的资源,如记忆体容量、存储单元长度、堆迭深度。在程序设计中,对资源参数不允许超范围使用。 应用参数。这些应用参数常表现为一些单片机、功能单元的应用条件。如E2PROM的擦写次数与资料存储
时
间等应用参数界限。 过程参数。指系统运行中的有序变化的参数。 在上述参数群对一程序编写者而言,须养成良好习惯,在程序的开头,有顺序的用自己喜欢文字参数对应列表来替代,然后用自己定义的文字参数来编写程序,这样在做程序的修改及维护
时
只在程序的开头做变动即可,不用修改到程序段,才比较容易且不会出错。 24. 有人认为单片机将被ARM等系列结构的嵌入式系统所取代。单片机的生命期还有多长? 答:因为8位单片机与嵌入式系统的ARM在功能结构和单价的差异,故应用层次上就有很大的不同。 ARM适用于系统复杂度较大的高级产品,如PDA、手机等应用。 而8位单片机因架构简单,硬件资源相对较少,适用于一般的工业控制,消费性家电……等等。评估单片机近期是否会给ARM取代,要观察两个因素: 芯片成本 因ARM的工作频率较高,电路较庞大,所需的芯片制造工艺要求在0。25U以上,成本较高。8位单片机工作频率相对较低,电路较小,所需的芯片制造工艺在0。5U 即可,成本较低。 功能定位 ARM的功能较单片机强,但两者定位不同。就如现阶段不会有人用ARM去作一个简单的工业定
时
开关。当然,如果两者单价相同也无不可,但现实是有很大的单价差距。 至于将来,因芯片制造成本会不断下降,上述的成本差异影响愈来愈少!但我估计在往后5年单片机仍有价格优势,仍能存活!但ARM是否会精简架构,降低成本,抢夺低阶市场?我想可能性不大,ARM应该会向上发展。同样,单片机也只能向上发展,如16位,高功能……等。 原因就是因为芯片制造工艺进步太快。压迫芯片设计往高集成发展。 25. 在单片机C编成
时
,如何才能使生成的代码具有和汇编一样的效率? 答:如果是使用C语言编程
时
,不太可能生成的代码具有1:1和汇编一样的效率。 C语言命令要被硬件识别并执行,必须通过编译器编译。编译器分为前端、中端、后端。前端与各种计算机语言写的程序打交道,后端与处理器的基本指令集接轨。所以如果使用C编程
时
,要达到最高的效率,最好能够很了解所使用的C编译器。先试验一下每条C语言编译以后对应的汇编语言的语句行数,这样就可以很明确的知道效率。在今后编程的
时
候,使用编译效率最高的语句,这样就能确保单片机C编程的
时
候同样的功能不同的C程序,编译效率最高。但是各家的C编译器都会有一定的差异,优秀的嵌入式系统C编译器代码长度和执行
时
间仅比以汇编语言编写的同样功能程度长5-20%,所以不同厂家的C编译器的编译效率也会有所不同。 26. ARM单片机和哪种内核的单片机比较接近? 答:严格的说,ARM不是单片机,是一个嵌入式的实
时
操作系统。ARM(Advanced RISC Machines)是微处理器行业的一家知名企业,设计了大量高性能、廉价、耗能低的RISC处理器、相关技术及软件。ARM将其技术授权给世界上许多著名的半导体、软件和OEM厂商,每个厂商得到的都是一套独一无二的ARM相关技术及服务。所以市场上像Intel、IBM、LG半导体、NEC、SONY、菲利浦和国半这样的大公司都有ARM系列,现在不存在什幺ARM单片机和哪种内核的单片机比较接近的问题。而且由于厂家购买内核后会根据自己芯片应用方向的不同,自行添加不同的外挂功能模块,所以,同样内核的芯片其提供的功能是不同的。 27. 从51转到ARM会有困难吗? 答:从51转到ARM,其实编程之类的原理都是一样的,但是要注意的是ARM是一个RISC的架构,在ARM的应用开放源代码的程序很多,要想提高自己,就要多看别人的程序,linux,uc/os-II等等这些都是很好的源码。 28. 我学过MCS51单片机教材,很有兴趣,但缺乏实践经验,手头没有任何道具可供演练,资金又有限,请问该怎么办? 答:在没有任何条件进行实践
时
,如果真的有兴趣,可以下载一些具有软件仿真功能仿真软件进行一些编程,像一些做得比较好的51仿真软件应该具有这种功能。HOLTEK-p.htm" target="_blank" title="HOLTEK货源和PDF资料">HOLTEK的仿真软件HT-IDE3000也具有相应的功能,同
时
它还具有LCD软件仿真,周边电路的软件仿真。有兴趣的话,也可以去免费下载使用:http://www.holtek.com.cn/tech/tool/ide.htm。同
时
可以到一些ic37去购买一些简单器件自己练习搭一下电路以加强硬件方面的知识。 29. 如果已经有了针对某MCU的C实现的某个算法,保持框架不变,对核心的部分用汇编优化,有没有一些比较通用的原则? 答:每个人的编程都有自己的风格与习惯,如果要利用别人的程序,在其中修修改改,如果他的程序并没有很好的模块化的话,建议最好不要这幺做,否则本来预期达到事倍功半,说不定反而事半功倍了。要参考他人的程序当然可以,但是首要是要看懂并理解他人程序的算法精髓,而不是在他的基础上打补丁。而关于算法方面的优化,可以购买一些数据结构的书籍,上面有比较详细的说明。 30. 如果准备估计一个算法的MIPS,有什么好的途径? 答:算法的运行
时
间是指一个算法在计算机上运算所花费的
时
间。它大致等于计算机执行简单操作(如赋值操作,比较操作等)所需要的
时
间与算法中进行简单操作次数的乘积。通常把算法中包含简单操作次数的多少叫做算法的
时
间复杂性。它是一个算法运行
时
间的相对量度,一般用数量级的形式给出。度量一个程序的执行
时
间通常有两种方法: 一种是事后统计的方法。因为很多计算机内部都有计
时
功能,不同算法的程序可通过一组或若干组相同的统计数据以分辨优劣。但这种方法有两个缺陷:一是必须先运行依据算法编制的程序;二是所得
时
间的统计量依赖于计算机的硬件、软件等环境因素,有
时
容易掩盖算法本身的优劣。因此人们常常采用另一种事前分析估算的方法。 一种是事前分析估算的方法。一个程序在计算机上运行
时
所消耗的
时
间取决于下列因素: (1)依据的算法选用何种策略; (2)问题的规模。例如求100以内还是1000以内的素数; (3)书写程序的语言。对于同一个算法,实现语言的级别越高,执行效率就越低; (4)编译程序所产生的机器代码的质量。这个跟编译器有关; (5)机器执行指令的速度。 显然,同一个算法用不同的语言实现,或者用不同的编译程序进行编译,或者在不同的计算机上运行
时
,效率均不相同。这表明使用绝对的
时
间单位衡量算法的效率是不合适的。撇开这些与计算机硬件、软件有关的因素,可以认为一个特定算法"运行工作量"的大小,只依赖于问题的规模(通常用整数量n表示),或者说,它是问题规模的函数。 一个算法是由控制结构(顺序、分支和循环三种)和原操作(指固有数据类型的操作)构成的,则算法
时
间取决于两者的综合效果。为了便于比较同一问题的不同算法,通常的做法是,从算法中选取一种对于所研究的问题(或算法类型)来说是基本运算的原操作,以该基本操作
重复
执行的次数作为算法的
时
间度量。 算法的MIPS有专门的一门学问,可以去好好参考相关的数据结构书籍。 31. 遥控的编解码思路和设计流程是怎样的? 答:一般来说完整的遥控码分为头码、地址码、数据码和校验码四个组成部分。头码根据不同的厂家各不相同,地址码和数据码都由逻辑“1”和逻辑“0”组成。编码的设计目的,就是按照编码规则发送不同的码值。我们最常见的码型有SONY、松下、NEC等厂家型号。遥控编码芯片最常用的是在空调、DVD、车库门等遥控器上。 设计编码程序可以分为三个部分。 第一部分是了解码型的特性。遥控码的头码和地址码(也称为客户码)是固定不变的,数据码和校验码根据不同的键值而改变。 第二部分是计算发码
时
间。遥控码大部分都是由逻辑“1”和逻辑“0”组成,也就是由一串固定占空比、固定周期的方波所组成。通常这些方波的周期是毫秒甚至微秒等级,需要在
时
间上计算的比较精确。所以选择发码单片机型号的
时
候,就要考虑到单片机的运行速度是不是够快,以及程序运行
时
间够不够。 第三部分就是程序的编写。选定单片机型号之后,开始设计程序流程。一般来说我们使用I/O口就可以做发码的输出端口。发码程序一般由几个子程序组成,头码子程序、逻辑1子程序,逻辑0子程序以及校验码的算法子程序。一旦我们得到要发送码的命令后,首先调用头码子程序,然后根据客户码和键值调用逻辑1子程序或者逻辑0子程序,最后调用校验码算法子程序输出校验码。 HOLTEK-p.htm" target="_blank" title="HOLTEK货源和PDF资料">HOLTEK公司的HT48CA0/HT48RA0、HT48CA3/HT48RA3和HT48CA6是专为遥控器设计的单片机,它们具有专门红外输出口,可以实现绝大部分发码的要求。 设计解码程序也可以分为三部分。 第一部分了解编码波形特性。从分析编码的高、低脉冲宽度入手,了解逻辑“1”和逻辑“0”的波形占空比、周期。了解头码的特性。 第二部分确定接收方式。一般我们可以用I/O口查询方法或者INT口中断响应方法来接收编码。这两者的区别是I/O口查询方式比较耗费单片机的运行
时
间资源,需要不断的去侦测I/O的电平变化,以免漏掉有效的码值;而INT口中断接收方式则比较节省资源,当外部有电平变化
时
,单片机才需要去处理,不需要
时
刻进行侦测。但是INT口中断接收方式不能辨别相同周期不同占空比的波形特性,当编码所携带的逻辑“1”和逻辑“0”具有这种特性
时
,就无法通过INT口中断接收方式来辨别了,因为INT中断只是在上升沿或者下降沿的
时
候才触发。 第三部分将接收的码值存储并分析执行。根据判断高低电平的宽度(定
时
器或者延
时
),可以得到码值,也就是我们所说的解码。一般我们连续收到3个相同的完整码值,就确认此码的确被发出,并接收成功。当解码结束,根据码值我们可以判断出是哪个按键被按下,由此去执行相对的按键功能。 HOLTEK-p.htm" target="_blank" title="HOLTEK货源和PDF资料">HOLTEK公司的HT48以及HT49(带LCD)系列单片机,都可以符合大多数解码的任务。 32. 在学习单片机的过程中,如何理解预分频,12
时
钟模式(6
时
钟模型)等概念? 答:预分频器的英文是prescaler。它就是将输入的频率信号分频,然后再输出。HOLTEK-p.htm" target="_blank" title="HOLTEK货源和PDF资料">HOLTEK公司有一款最基本的8位I/O型单片机HT48R05A-1,我们就以这款单片机为例说明。HT48R05A-1有一个8位向上计数的定
时
器Counter。系统
时
钟Fsys(4MHz)进入八阶预分频器(8-stage Prescaler)进行分频,再进入定
时
计数器Counter计数。根据软件设置,预分频器可以将Fsys进行2的n次方分频(n=1~8)。举例来说,如果软件设置为预分频器2分频,那幺预分频器输出的频率就是Fsys/2=2MHz,这个2MHz信号再进入定
时
计数器Counter。 如果需要HT48R05A-1或者其它各类HOLTEK-p.htm" target="_blank" title="HOLTEK货源和PDF资料">HOLTEK单片机的详细资料,可以在如下地址下载:http://www.holtek.com.cn/referanc/htk_book.htm 。 12
时
钟模式(6
时
钟模型)应该就是在MCS51系列中,12个系统
时
钟为一个机器周期,2个系统
时
钟为一个状态,即一个机器周期有6个状态。 33. A/D、D/A的采样速率与其它单片机相比有什么优势? 答:HOLTEK-p.htm" target="_blank" title="HOLTEK货源和PDF资料">HOLTEK A/D Tyep MCU内嵌逐位逼近的A/D转换电路,精度有8bit/9bit/10bit,A/D转换
时
间最快为76us。 至于D/A,一般是指PWM输出,HOLTEK-p.htm" target="_blank" title="HOLTEK货源和PDF资料">HOLTEK A/D Type MCU都带有8bit的PWM输出,但HOLTEK-p.htm" target="_blank" title="HOLTEK货源和PDF资料">HOLTEK PWM的特点是其输出频率由系统频率决定(既系统频率选定后,PWM频率也就定了),其占空比通过对[PWM]寄存器赋值进行控制,不需要
占用
定
时
/计数器资源。 34. 采用AT89S51
时
,出现了按了复位按钮,RAM中的数据被修改了。这是
怎么回事
?注:数据放在特殊寄存器之外。 答:如果是RESET脚的复位按钮:一般MCU的RESET复位,其特殊寄存器会被重新初始化,而通用寄存器的值保持不变。 如果复位按钮是电源复位:那就是MCU的上电复位,其特殊寄存器会被初始化,而通用寄存器的值是随机数。 35. 将P2.7用来驱动一个NPN三极管,中间串接了一个1K的电阻。问题是:当我尝试向P2.7写’1’
时
,
发现
管脚只能输出大约0.5V的一个电平。这个电路的使用得妥当么?如何正确的使用IO功能? 答:是在仿真
时
遇到的问题,还是烧录芯片后遇到的问题? 可以先将P2.7的外部电路断开,测量输出电压是否正常。如果断开后输出电压正常,那就说明P2.7的驱动能力不够,不能驱动NPN三极管,应该改用PNP三极管(一般在MCU应用中,都采用PNP方式驱动)。如果断开后输出电压还不正常,那有可能是仿真器(或芯片)已经损坏。 36. 在做充电管理的
时
候,提高pwm的频率往往以牺牲精度为代价,如果用的AT90S4433(
avr
)、78P458(elan)频率分别做到16kHz(8bit)和32kHz(8bit),而希望做到的是100kHz(8bit以上),诸如atiny15那样。怎么办? 答:你所说的PWM是通过定
时
/计数器来控制其频率和占空比的,所以要提高频率,必然会降低精度。如果要提高PWM的频率,只能通过提高系统振荡频率来
解决
。 37. 汽车电子用的单片机是8位多,还是32位?如何看待单片机在汽车ic37中的前景? 答:现今汽车制造也是一个进步很快的工业,特别是电子应用于汽车上,令多种新功能得以实现。 总的来说,汽车电子应用分三部份。 汽车发动机控制:限速控制,涡轮增压,燃料喷注控制等。 汽车舒适装置:遥控防盗系统,自动空调系统,影音播放系统,卫星导航系统等。 汽车操控和制动:刹车防抱死系统(ABS),循迹系统(TCS),防滑系统(ASR),电子稳定系统(ESP)等。 汽车上的各系统繁多,且日新月异,故利用何种单片机是依各系统规格,要求不一,但有一样可肯定是该单片机要符工业规格,才能忍受汽车应用的恶劣环境,高温,电源干扰,可靠度要求。不同档次的汽车其功能配置相对亦有差别,故8位单片机在较低阶的系统如机械控制,遥控防盗等应该还有空间,但高阶的系统如影音、导航及将来的无人驾驶,就非一般单片机能实现。 因汽车工业现阶段由欧美日数个大集团所把持,相关的汽车电子配件各集团会挑选单片机大厂合作, 故汽车内置的电子系统亦由单片机大厂把持,市场只剩外置系统如遥控防盗,影音导航供小厂开发。 38. 在使用三星的s3c72n4
时
,觉得它的time/counter不够用。现在要同
时
用到3个counter,该怎么办? 答:您是需要三个外部counter还是需要三个定
时
器?如果是三个定
时
器标志的话,可以取这三个定
时
最基本的
时
基作为timer的基础计数,然后以这个
时
基来计算这三个需要的计数标志的flag,在程序中只需要查询flag是否到,再采取动作。 如果要3个外部脉冲计数的话,这个有一定的难度,如果外部脉冲不是很频繁,可以考虑通过外部中断进行,但是这个方法必须是外部脉冲的频率与MCU执行速度有一定的数量级差,否则mcu可能无法处理其它程序,一直在处理外部中断。 39. 在芯片集成技术日益进步的今天,单片机的集成技术发展也很迅速,在传统的40引脚的基础上,飞利浦公司推出20引脚的单片机系列,使很多的引脚可以复用,这种复用技术的使用在实际应用中会不会影响其功能的执行? 答:现在有很多品牌的单片机都有引脚复用功能,不止飞利浦一家,应该说这个方式前几年就已经有了。在实际应用中不会影响其功能的执行,但是要注意的是,有的MCU如果采用复用引脚的话,该引脚会有一些应用上的限制,这在相应的datasheet里面都会有描述,所以在系统规划的
时
候都要予以注意。 40. Delta-Sigma软件测量方式,是什么概念? 答:Delta-Sigma原理一般应用在ADC应用中。具体来说,Delta-Sigma ADC的工作原理是由差动器、积分器和比较器构成调制器,它们一起构成一个反馈环路。调制器以大大高于
模拟
输入信号带宽的速率运行,以便提供过采样。
模拟
输入与反馈信号(误差信号)进行差动 (delta)比较。该比较产生的差动输出馈送到积分器(sigma)中。然后将积分器的输出馈送到比较器中。比较器的输出同
时
将反馈信号(误差信号)传送到差动器,而自身被馈送到数字滤波器中。这种反馈环路的目的是使反馈信号(误差信号)趋于零。比较器输出的结果就是1/0 流。该流如果1密度较高,则意味着
模拟
输入电压较高;反之,0密度较高,则意味着
模拟
输入电压较低。接着将1/0流馈送到数字滤波器中,该滤波器通过过采样与抽样,将1/0流从高速率、低精度位流转换成低速率、高精度数字输出。 简而言之,Delta就是差动,Sigma就是积分的意思。Delta-Sigma软件测试,我的理解应该是通过软件
模拟
差动积分的过程。具体来说,就是侦测外部输入的电压(或者电流)信号变化,然后通过软件积分运算,得出外部信号随
时
间变化的基本状况。 41. 通常采用什么方法来测试单片机系统的可靠性? 答:单片机系统可以分为软件和硬件两个方面,我们要保证单片机系统可靠性就必须从这两方面入手。 首先在设计单片机系统
时
,就应该充分考虑到外部的各种各样可能干扰,尽量利用单片机提供的一切手段去割断或者
解决
不良外部干扰造成的影响。我们以HOLTEK-p.htm" target="_blank" title="HOLTEK货源和PDF资料">HOLTEK最基本的I/O单片机HT48R05A-1为例,它内部提供了看门狗定
时
器WDT防止单片机内部程序乱跑出错;提供了低电压复位系统LVR,当电压低于某个允许值
时
,单片机会自动RESET防止芯片被锁死;HOLTEK-p.htm" target="_blank" title="HOLTEK货源和PDF资料">HOLTEK也提供了最佳的外围电路连接方案,最大可能的避免外部干扰对芯片的影响。 当一个单片机系统设计完成,对于不同的单片机系统产品会有不同的测试项目和方法,但是有一些是必须测试的: 测试单片机软件功能的完善性。 这是针对所有单片机系统功能的测试,测试软件是否写的正确完整。 上电掉电测试。在使用中用户必然会遇到上电和掉电的情况,可以进行多次开关电源,测试单片机系统的可靠性。 老化测试。测试长
时
间工作情况下,单片机系统的可靠性。必要的话可以放置在高温,高压以及强电磁干扰的环境下测试。 ESD和EFT等测试。可以使用各种干扰
模拟
器来测试单片机系统的可靠性。例如使用静电
模拟
器测试单片机系统的抗静电ESD能力;使用突波杂讯
模拟
器进行快速脉冲抗干扰EFT测试等等。 当然如果没有此类条件,可以
模拟
人为使用中,可能发生的破坏情况。例如用人体或者衣服织物故意摩擦单片机系统的接触端口,由此测试抗静电的能力。用大功率电钻靠近单片机系统工作,由此测试抗电磁干扰能力等。 42. 在开发单片机的系统
时
,具体有那些是衡量系统的稳定性的标准? 答:从工业的角度来看,衡量系统稳定性的标准有很多,也针对不同的产品标准不同。下面我们大概介绍单片机系统最常用的标准。 电试验(ESD) 参考标准: IEC 61000-4-2 本试验目的为测试试件承受直接来自操作者及相对对象所产生之静电放电效应的程度。 空间辐射耐受试验(RS) 参考标准:IEC 61000-4-3 本试验为验证试件对射频产生器透过空间散射之噪声耐受程度。 测试频率:80 MHz~1000 MHz 快速脉冲抗扰测试(EFT/B) 参考标准:IEC 61000-4-4 本试验目的为验证试件之电源线,信号线(控制线)遭受
重复
出现之快速瞬
时
丛讯
时
之耐受程度。 雷击试验(Surge) 参考标准 : IEC 61000-4-5 本试验为针对试件在操作状态下,承受对于开关或雷击瞬
时
之过电压/电流产生突波之耐受程度。 传导抗扰耐受性(CS) 参考标准:IEC 61000-4-6 本试验为验证试件对射频产生器透过电源线传导之噪声耐受程度。 测试频率范围:150 kHz~80 MHz Impulse 脉冲经由耦合注入电源线或控制线所作的杂抗扰性试验。 43. 在设计软体
时
,大多单片机都设有看门狗,需要在软体适当的位置去喂狗,以防止软体复位和软体进入死循环,如何适当的喂狗,即如何精确判定软体的运行
时
间? 答:大多数单片机都有看门狗定
时
器功能(WDT,Watch Dog Timer)以避免程序跑错。HOLTEK-p.htm" target="_blank" title="HOLTEK货源和PDF资料">HOLTEK有一款基本I/O型单片机--HT48R05A-1,我们就以它为例做个说明吧。 首先了解一下WDT的基本结构,它其实是一个定
时
器,所谓的喂狗是指将此定
时
器清零。喂狗分为软件和硬件两种方法。软件喂狗就是用指令来清除WDT,即CLR WDT;硬件喂狗就是硬件复位RESET。当定
时
器溢出
时
,会造成WDT复位,也就是我们常说的看门狗起作用了。在程序正常执行
时
,我们并不希望WDT复位,所以要在看门狗溢出之前使用软件指令喂狗,也就是要计算WDT相隔多久
时
间会溢出一次。HT48R05A-1的WDT溢出
时
间计算公式是:256*Div*Tclock。其中Div是指wdt预分频数1~128,Tclock是指
时
钟来源周期。如果使用内部RC振荡作为WDT的
时
钟来源(RC
时
钟周期为65us/5V),最大的WDT溢出
时
间为2.1秒。 当我们得到了WDT溢出
时
间Twdt后,一般选择在Twdt/2左右的
时
间进行喂狗,以保证看门狗不会溢出,同
时
喂狗次数不会过多。 软件运行
时
间是根据不同的运行路线来决定的,如果可以预见软件运行的路线,那么可以根据T=n*T1来计算软件的运行
时
间。n是指运行的机器周期数,T1是指机器周期。HOLTEK-p.htm" target="_blank" title="HOLTEK货源和PDF资料">HOLTEK单片机是RISC结构,大部分指令由一个机器周期组成,只需要知道软件运行了多少条指令,就可以算出运行
时
间了。HOLTEK-p.htm" target="_blank" title="HOLTEK货源和PDF资料">HOLTEK的编译软件HT-IDE3000中,就有计算运行
时
间的工具。但是对于CISC结构的单片机,一条指令可以由若干个机器周期组成,那么就需要根据具体执行的指令来计算了。 44. 我们是一家开发数控系统的专业厂,利用各种单片机和CPU开发了很多产品,在软件开发上也采用了很多通用的抗干扰技术,如:软件陷阱、指令允余、看门狗和数字滤波等等,但实际运用中还是很不可靠,如:经常莫名其妙地死机、程序跳段、I/O数据错误等,并且故障的
重复
性很不确定,也不是周期性地
重复
。往往用户使用中出现故障,但又无法重现,很让人头痛。反复检查硬件也设查出原因,所以对软件的可靠性很是怀疑。怎么办? 答:防止干扰最有效的方法是去除干扰源、隔断干扰路径,但往往很难做到,所以只能看单片机抗干扰能力够不够强了。单片机干扰最常见的现象就是复位;至于程序跑飞,其实也可以用软件陷阱和看门狗将程序拉回到复位状态;所以单片机软件抗干扰最重要的是处理好复位状态。 一般单片机都会有一些标志寄存器,可以用来判断复位原因;另外也可以自己在RAM中埋一些标志。在每次程序复位
时
,通过判断这些标志,可以判断出不同的复位原因;还可以根据不同的标志直接跳到相应的程序。这样可以使程序运行有连续性,用户在使用
时
也不会察觉到程序被重新复位过。 可以在定
时
中断里面设置一些暂存器累加,然后加到预先设定的值(一个比较长的
时
间),SET标志位,这些动作都在中断程序里面。而主程序只需要查询标志位就好了,但是注意标志位使用后,记得清除,还有中断里面的
时
基累加器使用以后也要记得清除。
基于AT89S52 单片的频率计
第1 页共27 页 1 概述 频率计的基本原理是用一个频率稳定度高的频率源作为基准
时
钟,对比测 量其他信号的频率。通常情况下计算每秒内待测信号的脉冲个数,此
时
我们称 闸门
时
间为1 秒。闸门
时
间也可以大于或小于一秒。闸门
时
间越长,得到的频 率值就越准确,但闸门
时
间越长则没测一次频率的间隔就越长。闸门
时
间越 短,测的频率值刷新就越快,但测得的频率精度就受影响本文。数字频率计是 用数字显示被测信号频率的仪器,被测信号可以是正弦波,方波或其它周期性 变化的信号。因此,数字频率计是一种应用很广泛的仪器 电子系统非常广泛的应用领域内,到处可见到处理离散信息的数字电路。 数字电路制造工业的进步,使得系统设计人员能在更小的空间内实现更多的功 能,从而提高系统可靠性和速度。 集成电路的类型很多,从大的方面可以分为
模拟
电路和数字集成电路2 大 类。数字集成电路广泛用于计算机、控制与测量系统,以及其它电子设备中。 一般说来,数字系统中运行的电信号,其大小往往并不改变,但在实践分布上 却有着严格的要求,这是数字电路的一个特点。 2 系统的总体设计: 2.1 原理设计 本频率计的设计以AT89S52 单片机为核心,利用它内部的定
时
/计数器完成 待测信号周期/频率的测量。单片机AT89S52 内部具有2 个16 位定
时
/计数器, 定
时
/计数器的工作可以由编程来实现定
时
、计数和产生计数溢出中断要求的功 能。在构成为定
时
器
时
,每个机器周期加1 (使用12MHz
时
钟
时
,每1us 加1),这 样以机器周期为基准可以用来测量
时
间间隔。在构成为计数器
时
,在相应的外部 引脚发生从1 到0 的跳变
时
计数器加1,这样在计数闸门的控制下可以用来测 量待测信号的频率。外部输入每个机器周期被采样一次,这样检测一次从1 到0 的跳变至少需要2 个机器周期(24 个振荡周期) ,所以最大计数速率为
时
钟频率 的1/24 (使用12MHz
时
钟
时
,最大计数速率为500 KHz) 。定
时
/计数器的工作由 相应的运行控制位TR 控制,当TR 置1 ,定
时
/计数器开始计数;当TR 清0 ,停止计 数。设计综合考虑了频率测量精度和测量反应
时
间的要求。例如当要求频率测 量结果为4 位有效数字,这
时
如果待测信号的频率为1Hz ,则计数闸门宽度必须 大于1000s。为了兼顾频率测量精度和测量反应
时
间的要求,把测量工作分为两 种方法。当待测信号的频率大于等于2Hz
时
,定
时
/ 计数器构成为计数器,以机 器周期为基准,由软件产生计数闸门,这
时
要满足频率测量结果为4 位有效数字, 则计数闸门宽度大于1s 即可。当待测信号的频率小于2Hz
时
,定
时
/ 计数器构 成为定
时
器,由频率计的予处理电路把待测信号变成方波,方波宽度等于待测信号 的周期。用方波作计数闸门,完全满足测量精度的要求。 频率计的量程自动切换在使用计数方法实现频率测量
时
,这
时
外部的待测信 号为定
时
/ 计数器的计数源,利用定
时
器实现计数闸门。频率计的工作过程为: 首先定
时
/计数器T0 的计数寄存器设置一定的值,运行控制位TR0 置1,启动定
时
/ 计数器0;利用定
时
器0 来控制1S 的定
时
,同
时
定
时
/计数器T1 对外部的待 第2 页共27 页 测信号进行计数,定
时
结束
时
TR1 清0 ,停止计数;最后从计数寄存器读出测量数 据,在完成数据处理后,由显示电路显示测量结果。在使用定
时
方法实现频率测 量
时
,这
时
外部的待测信号通过频率计的予处理电路变成宽度等于待测信号周期 的方波,该方波同样加至定
时
/ 计数器1 的输入脚。这
时
频率计的工作过程为: 首先定
时
/ 计数器1 的计数寄存器清0 ,然后检测到方波的第二个下降沿是否加 至定
时
/ 计数器的输入脚;当判定下降沿加至定
时
/计数器的输入脚,运行控制位 TR0 置1 ,启动定
时
/计数器T0 对单片机的机器周期的计数,同
时
检测方波的第 三个下降沿;当判定检测到第三个下降沿
时
TR0 清0 ,停止计数,然后从计数 寄存器T0 读出测量数据,在完成数据处理后,由显示电路显示测量结果。测量 结果的显示格式采用科学计数法,即有效数字乘以10 为底的幂。这里设计的频 率计用4 位数码管显示测量结果。 定
时
方法实现频率测量。定
时
方法测量的是待测信号的周期,这种方法只设 一种量程,测量结果通过浮点数运算模块将信号周期转换成对应的频率值,再将 结果送去显示。这样无论采用何种方式,只要完成一次测量即可,频率计自动开 始下一个测量循环,因此该频率计具有连续测量的功能,同
时
实现量程的自动转 换。 数字频率计的硬件框图如图2.1 所示。 由此可以看出该频率计主要由八部分组成,分别是: (1)待测信号的放大整形电路 因为数字频率计的测量范围为峰值电压在一定电压范围内的频率发生频率 发生周期性变化的信号,因待测信号的不规则,不能直接送入FPGA 芯片中处 理,所以应该首先对待测信号进行放大、降压、与整形等一系列处理。 (2)分频电路 将处理过的信号4 分频,这样可以将频率计的测量范围扩大4 倍。 (3)逻辑控制 控制是利用计数还是即
时
检测待测信号的频率。 (4)脉冲计数/定
时
根据逻辑控制对待测信号计数或定
时
。将计数或定
时
得到的数据直接输入 数据处理部分。 第3 页共27 页 (5)数据处理 根据脉冲计数部分送过来的数据产生一个控制信号,送入脉冲定
时
部分, 如果用计数就可以得到比较精确的频率,就将这个频率值直接送入显示译码部 分。 (6)显示译码 将测量值转换成七段译码数据,送入显示电路。 (7)显示电路 通过4 个LED 数码管将测得的频率值显示给用户。 (8)系统软件 包括测量初始化模块、显示模块、信号频率测量模块、量程自动转换模 块、信号周期测量模块、定
时
器中断服务模块、浮点数格式化模块、浮点数算 术运算模块、浮点数到BCD 码转换模块。 由于数据处理、脉冲计数/定
时
、逻辑控制和显示译码都是在单片机里完成 的,所以我们可以把系统分为以下几个模块:数据处理电路、显示电路、待测信 号产生电路、待测信号整形放大电路,电源电路。 2.2 主要开发工具和平台 2.2.1 原理图和印刷电路板图设计开发工具:PROTEL DXP Protel DXP 是第一套完整的板卡级设计系统,真正实现在单个应用程序中的 集成。设计从一开始的目的就是为了支持整个设计过程,Protel DXP 让你可以 选择最适当的设计途径来按你想要的方式工作。Protel DXP PCB 线路图设计系 图2.1 数字频率计的硬件框图 显示译码 待测信号的放大整形电路 数据处理逻辑控制 脉冲计数/定
时
显示电路 待测波输入 分频电路 第4 页共27 页 统完全利用了Windows XP 和Windows 2000 平台的优势,具有改进的稳定性、 增强的图形功能和超强的用户界面。 Protel DXP 是一个单个的应用程序,能够提供从概念到完成板卡设计项目的 所有功能要求,其集成程度在PCB 设计行业中前所未见。Protel DXP 采用一种 新的方法来进行板卡设计,使你能够享受极大的自由,从而能够使你在设计的 不同阶段随意转换,按你正常的设计流量进行工作。 Protel DXP 拥有:分级线路图设计、Spice 3f5 混合电路
模拟
、完全支持线路 图基础上的FPGA 设计、设计前和设计后的信号线传输效应分析、规则驱动的 板卡设计和编辑、自动布线和完整CAM 输出能力等。 在嵌入式设计部分,增强了JTAG 器件的实
时
显示功能,增强型基于FPGA 的逻辑分析仪,可以支持32 位或64 位的信号输入。除了现有的多种处理器内核 外,还增强了对更多的32 位微处理器的支持,可以使嵌入式软件设计在软处理 器, FPGA 内部嵌入的硬处理器, 分立处理器之间无缝的迁移。使用了 Wishbone 开放总线连接器允许在FPGA 上实现的逻辑模块可以透明的连接到各 种处理器上。引入了以FPGA 为目标的虚拟仪器,当其与LiveDesign-enabled 硬 件平台NanoBoard 结合
时
,用户可以快速、交互地实现和
调试
基于FPGA 的设 计,可以更换各种FPGA 子板,支持更多的FPGA 器件。 2.2.2 单片机程序设计开发工具:KEIL C51 keil c51 是美国Keil Software 公司出品的51 系列兼容单片机C 语言软件开发 系统,和汇编相比,C 在功能上、结构性、可读性、可维护性上有明显的优 势,因而易学易用。 Keil c51 软件提供丰富的库函数和功能强大的集成开发
调试
工具,全 Windows 界面。另外重要的一点,只要看一下编译后生成的汇编代码,就能体 会到keil c51 生成的目标代码效率非常之高,多数语句生成的汇编代码很紧凑, 容易理解。在开发大型软件
时
更能体现高级语言的优势。 Keil C51 可以完成编辑、编译、连接、
调试
、仿真等整个开发流程。开发人 员可用IDE 本身或其它编辑器编辑C 或汇编源文件,然后分别有C51 及A51 编 辑器编译连接生成单片机可执行的二进制文件(.HEX),然后通过单片机的烧 写软件将HEX 文件烧入单片机内。3 2.2.3 单片机仿真软件:PROTEUS Proteus 是目前最好的
模拟
单片机外围器件的工具。可以仿真51 系列、
AVR
,PIC 等常用的MCU 及其外围电路(如LCD,RAM,ROM,键盘,马 达,LED,AD/DA,部分SPI 器件,部分IIC 器件,...) 其实proteus 与 multisim 比较类似,只不过它可以仿真MCU!唯一的缺点,软件仿真精度有 限,而且不可能所有的器件都找得到相应的仿真模型。 使用keil c51 v7.50 + proteus 6.7 可以像使用仿真器一样
调试
程序,可以完全 仿真单步
调试
,进入中断等各种
调试
方案。 Proteus 与其它单片机仿真软件不同的是,它不仅能仿真单片机CPU 的工 作情况,也能仿真单片机外围电路或没有单片机参与的其它电路的工作情况。 因此在仿真和程序
调试
时
,关心的不再是某些语句执行
时
单片机寄存器和存储 器内容的改变,而是从工程的角度直接看程序运行和电路工作的过程和结果。 对于这样的仿真实验,从某种意义上讲,是弥补了实验和工程应用间脱节的矛 第5 页共27 页 盾和现象。 3 系统详细设计: 3.1 硬件设计 3.1.1 数据处理电路 ( 1 ) 中央处理模块的功能: 直接采集待测信号,将分两种情况计算待测信号的频率: 如果频率比较高,在一秒内对待测信号就行计数。 如果频率比较低,在待测信号的一个周期内对单片机的工作频率进行计数。 将得到的频率值通过显示译码后直接送入显示电路,显示给用户 ( 2 ) 电路需要
解决
的问题 单片机最小系统板电路的组建,单片机程序下载接口和外围电路的接口。 单片机最小系统板的组建: ①单片机的起振电路作用与选择: 单片机的起振电路是有晶振和两个小电容组成的。 晶振的作用:它结合单片机内部的电路,产生单片机所必须的
时
钟频率,单 片机的一切指令的执行都是建立在这个基础上的,晶振的提供的
时
钟频率越 高,那单片机的运行速度也就越快。MCS-51 一般晶振的选择范围为1~ 24MHz,但是单片机对
时
间的要求比较高,能够精确的定
时
一秒,所以也是为了 方便计算我们选择12MHz 的晶振。 晶振两边的电容:晶振的标称值在测试
时
有一个“负载电容”的条件,在工 作
时
满足这个条件,振荡频率才与标称值一致。一般来讲,有低负载电容(串 联谐振晶体),高负载电容(并联谐振晶体)之分。在电路上的特征为:晶振 串一只电容跨接在IC 两只脚上的,则为串联谐振型;一只脚接IC,一只脚接地 的,则为并联型。如确实没有原型号,需要代用的可采取串联谐振型电路上的 电容再并一个电容,并联谐振电路上串一只电容的措施。单片机晶振旁的2 个 电容是晶体的匹配电容,只有在外部所接电容为匹配电容的情况下,振荡频率 才能保证在标称频率附近的误差范围内。 最好按照所提供的数据来,如果没有,一般是30pF 左右。太小了不容易起 振。这里我们选择30pF 的瓷片电容。我们选择并联型电路如图3.1 所示。 ②单片机的复位电路: 2 1 Y1 12Mz C2 30pF C1 30pF XTAL1 XTAL2 图3.1 第6 页共27 页 影响单片机系统运行稳定性的因素可大体分为外因和内因两部分: 外因:即射频干扰,它是以空间电磁场的形式传递在机器内部的导体(引线 或零件引脚)感生出相应的干扰,可通过电磁屏蔽和合理的布线/器件布局衰减 该类干扰;电源线或电源内部产生的干扰,它是通过电源线或电源内的部件耦 合或直接传导,可通过电源滤波、隔离等措施来衰减该类干扰。 内因:振荡源的稳定性,主要由起振
时
间频率稳定度和占空比稳定度决定 起振
时
间可由电路参数整定稳定度受振荡器类型温度和电压等参数影响复位电 路的可靠性。 复位电路的基本功能是:系统上电
时
提供复位信号,直至系统电源稳定 后,撤销复位信号。为可靠起见,电源稳定后还要经一定的延
时
才撤销复位信 号,以防电源开关或电源插头分-合过程中引起的抖动而影响复位。 为了方便我们选择RC 复位电路可以实现上述基本功能如图3.2 所示。 但是该电路
解决
不了电源毛刺(A 点)和电源缓慢下降(电池电压不足)等 问题而且调整RC 常数改变延
时
会令驱动能力变差。增加Ch 可避免高频谐波 对电路的干扰。 复位电路增加了二极管,在电源电压瞬间下降
时
使电容迅速放电,一定宽 度的电源毛刺也可令系统可靠复位。 在选择元器件大小
时
,正脉冲有效宽度 2 个机器周期就可以有效的复位, 一般选择C3 为0.1uF 的独石电容,R1 为1K 的电阻,正脉冲有效宽度为: ln10*R1*C3=230>2,即可以该电路可以产生有效复位。 ( 3 ) 程序下载线接口: AT89S52 自带有isp 功能,ISP 的全名为In System Programming,即在线编 程通俗的讲就是编MCU 从系统目标系统中移出在结合系统中一系列内部的硬 件资源可实的远程编程。 ISP 功能的优点: ①在系统中编程不需要移出微控制器。 ②不需并行编程器仅需用P15,P16 和P17,这三个IO 仅仅是下载程序的
时
候使用,并不影响程序的使用。 ③结合上位机软件免费就可实现PC 对其编程硬件电路连接简单如图3.3 所 示。 104 C3 1K R1 S1 VCC D1 1N4007 RESET Ch 0.1uF 图3.2 复位电路 第7 页共27 页 系统复位
时
,单片机检查状态字节中的内容。如果状态字为0,则转去0000H 地址开始执行程序这是用户程序的正常起始地址。如果状态字不0, 则将引导 向量的值作为程序计数器的高8 位,低8 位固定为00H,若引导向量为FCH, 则程序计数器内容为FC00H 即程序转到FC00H 地址开始执行而ISP 服务程序 就是从,FC00H 处开始的那么也就是进入了ISP 状态了,接下来就可以用PC 机 的ISP 软件对单片机进行编程了。 ( 4 ) 去耦电容 好的高频去耦电容可以去除高到1GHZ 的高频成份。陶瓷片电容或多层陶瓷 电容的高频特性较好。 设计印刷线路板
时
,每个集成电路的电源,地之间都要加一个去耦电容。 去耦电容有两个作用:一方面是本集成电路的蓄能电容,提供和吸收该集成电 路开门关门瞬间的充放电能;另一方面旁路掉该器件的高频噪声。数字电路中 典型的去耦电容为0.1uf 的去耦电容有5nH 分布电感,它的并行共振频率大约在 7MHz 左右,也就是说对于10MHz 以下的噪声有较好的去耦作用,对40MHz 以 上的噪声几乎不起作用。 1uf,10uf 电容,并行共振频率在20MHz 以上,去除高频率噪声的效果要好 一些。在电源进入印刷板的地方和一个1uf 或10uf 的去高频电容往往是有利 的,即使是用电池供电的系统也需要这种电容。 每10 片左右的集成电路要加一片充放电电容,或称为蓄放电容,电容大小 可选10uf。最好不用电解电容,电解电容是两层溥膜卷起来的,这种卷起来的 结构在高频
时
表现为电感,最好使用胆电容或聚碳酸酝电容。 去耦电容值的选取并不严格,可按C=1/f 计算;即10MHz 取0.1uf,对微控 制器构成的系统,取0.1~0.01uf 之间都可以。 从电路来说,总是存在驱动的源和被驱动的负载。如果负载电容比较大, 驱动电路要把电容充电、放电,才能完成信号的跳变,在上升沿比较陡峭的
时
候,电流比较大,这样驱动的电流就会吸收很大的电源电流,由于电路中的电 感,电阻(特别是芯片管脚上的电感,会产生反弹),这种电流相对于正常情 况来说实际上就是一种噪声,会影响前级的正常工作。这就是耦合。 去藕电容就是起到一个电池的作用,满足驱动电路电流的变化,避免相互 间的耦合干扰。 旁路电容实际也是去藕合的,只是旁路电容一般是指高频旁路,也就是给 高频的开关噪声提高一条低阻抗泄防途径。高频旁路电容一般比较小,根据谐 振频率一般是0.1u,0.01u 等,而去耦合电容一般比较大,是10u 或者更大,依 据电路中分布参数,以及驱动电流的变化大小来确定。 去耦和旁路都可以看作滤波。正如ppxp 所说,去耦电容相当于电池,避免 1 2 3 4 5 6 7 8 9 10 P6 P17 P16 RESET P15 GND GND VCC 图3.3 程序下载线接口 第8 页共27 页 由于电流的突变而使电压下降,相当于滤纹波。具体容值可以根据电流的大 小、期望的纹波大小、作用
时
间的大小来计算。去耦电容一般都很大,对更高 频率的噪声,基本无效。旁路电容就是针对高频来的,也就是利用了电容的频 率阻抗特性。电容一般都可以看成一个RLC 串联模型。在某个频率,会发生谐 振,此
时
电容的阻抗就等于其ESR。如果看电容的频率阻抗曲线图,就会
发现
一般都是一个V 形的曲线。具体曲线与电容的介质有关,所以选择旁路电容还 要考虑电容的介质,一个比较保险的方法就是多并几个电容。去耦电容在集成 电路电源和地之间的有两个作用:一方面是本集成电路的蓄能电容,另一方面 旁路掉该器件的高频噪声。数字电路中典型的去耦电容值是0.1μF。这个电容的 分布电感的典型值是5μH。0.1μF 的去耦电容有5μH 的分布电感,它的并行共振 频率大约在7MHz 左右,也就是说,对于10MHz 以下的噪声有较好的去耦效 果,对40MHz 以上的噪声几乎不起作用。1μF、10μF 的电容,并行共振频率在 20MHz 以上,去除高频噪声的效果要好一些。每10 片左右集成电路要加一片充 放电电容,或1 个蓄能电容,可选10μF 左右。最好不用电解电容,电解电容是 两层薄膜卷起来的,这种卷起来的结构在高频
时
表现为电感。要使用钽电容或 聚碳酸酯电容。去耦电容的选用并不严格,可按C=1/F,即10MHz 取0.1μF, 100MHz 取0.01μF,电路图如图3.4 所示。 ⑸单片机与外界的接口 显示电路的段选使用P0 口,P0 口是属于TTL 电路,不能靠输出控制P0 口 的高低电平,需要上拉电阻才能实现。 由于单片机不能直接驱动4 个数码管的显示,需要数码管的驱动电路,驱动 电路采用NPN 型的三极管组成,即上拉电阻又有第二个作用,驱动晶体管,晶 体管又分为PNP 和NPN 管两种情况:对于NPN,毫无疑问NPN 管是高电平有 效的,因此上拉电阻的阻值用2K——20K 之间的,具体的大小还要看晶体管的 集电极接的是什么负载,对于数码管负载,由于发管电流很小,因此上拉电阻 的阻值可以用20k 的,但是对于管子的集电极为继电器负载
时
,由于集电极电 流大,因此上拉电阻的阻值最好不要大于4.7K,有
时
候甚至用2K 的。对于PNP 管,毫无疑问PNP 管是低电平有效的,因此上拉电阻的阻值用100K 以上的就行 了,且管子的基极必须串接一个1~10K 的电阻,阻值的大小要看管子集电极的 负载是什么,对于数码管负载,由于发光电流很小,因此基极串接的电阻的阻 值可以用20k 的,但是对于管子的集电极为继电器负载
时
,由于集电极电流 大,因此基极电阻的阻值最好不要大于4.7K。与外界的信号交换接口,电路图 如图3.5。 104 CK11 104 CK12 104 CK13 104 CK14 VCC 图3.4 去耦电容 第9 页共27 页 数码管的段选通过P00~P07 口来控制的。 数码管的位选通过P20~P23 口来控制的。 计算待测信号的频率通过计数器1 来完成的所有待测信号解答计数器的T1 口上,即P3.5。 ⑹单片机的选型: AT89SC52 和AT89SS52 最主要的区别在于下载电压,AT89SC52 单片机下载 电压
时
最小为12V,而AT89S52 仅在5V 电压下就可以下载程序了,而且AT89S52 支持ISP,即在线编程。为了使用方便,在本系统中我们使用AT89S52 单片机。 ①AT89S52 主要性能 与MCS-51 单片机产品兼容。 8K 字节在系统可编程Flash 存储器。 l 1000 次擦写周期。 全静态操作:0Hz~33Hz。 VCC 1 2 YK1 30pF CK1 30pF CK2 VCC P00 P01 P02 P03 P04 P05 P06 P07 P20 P21 P22 P23 P15 P16 P17 123456789 PK1 P00 P01 P02 P03 P04 P05 P06 P07 P20 P21 P22 P23 P00 P01 P02 P03 P04 P05 P06 P07 P1.0/T2 1 P1.1/T2EX 2 P1.2/ECI 3 P1.3/CEX0 4 P1.4/CEX1 5 P1.5/CEX2 6 P1.6/CEX3 7 P1.7/CEX4 8 9 RST 10 P3.0/RxD 11 P3.1/TxD 12 P3.2/INT0 13 P3.3/INT1 14 P3.4/T0 15 P3.5/T1 16 P3.6/WR 17 P3.7/RD 18 XTAL2 19 XTAL1 20 VSS P2.0/A8 21 P2.1/A9 22 P2.2/A10 23 P2.3/A11 24 P2.4/A12 25 P2.5/A13 26 P2.6/A14 27 P2.7/A15 28 29 PSEN 30 ALE/PROG 31 EA/VPP P0.7/AD7 32 P0.6/AD6 33 P0.5/AD5 34 P0.4/AD4 35 P0.3/AD3 36 P0.2/AD2 37 P0.1/AD1 38 P0.0/AD0 39 VCC 40 UK1 AT89S52 图3.5 单片机与外界接口 第10 页共27 页 三级加密程序存储器。 32 个可编程I/O 口线。 三个16 位定
时
器/计数器。 八个中断源。 全双工UART 串行通道。 低功耗空闲和掉电模式。 掉电后中断可唤醒。 看门狗定
时
器。 双数据指针。 掉电标识符。 ②功能特性描述: AT89S52 是一种低功耗、高性能CMOS8 位微控制器,具有8K 在系统可编 程Flash 存储器。使用Atmel 公司高密度非易失性存储器技术制造,与工业 80C51 产品指令和引脚完全兼容。片上Flash 允许程序存储器在系统可编程,亦 适于常规编程器。在单芯片上,拥有灵巧的8 位CPU 和在系统可编程Flash, 使得AT89S52 为众多嵌入式控制应用系统提供高灵活、超有效的
解决
方案。 AT89S52 具有以下标准功能: 8k 字节Flash,256 字节RAM, 32 位I/O 口 线,看门狗定
时
器,2 个数据指针,三个16 位定
时
器/计数器,一个6 向量2 级中断结构,全双工串行口,片内晶振及
时
钟电路。另外,AT89S52 可降至 0Hz 静态逻辑操作,支持2 种软件可选择节电模式。空闲模式下,CPU 停止工 作,允许RAM、定
时
器/计数器、串口、中断继续工作。掉电保护方式下, RAM 内容被保存,振荡器被冻结,单片机一切工作停止,直到下一个中断或硬 件复位为止R8 位微控制器8K 字节在系统可编程Flash P0 口:P0 口是一个8 位漏极开路的双向I/O 口。作为输出口,每位能驱动8 个 TTL 逻辑电平。对P0 端口写“1”
时
,引脚用作高阻抗输入。当访问外部程序和 数据存储器
时
,P0 口也被作为低8 位地址/数据复用。在这种模式下,P0 具有内 部上拉电阻。在flash 编程
时
,P0 口也用来接收指令字节;在程序校验
时
,输出 指令字节。程序校验
时
,需要外部上拉电阻。 P1 口:P1 口是一个具有内部上拉电阻的8 位双向I/O 口,p1 输出缓冲器 能驱动4 个TTL 逻辑电平。对P1 端口写“1”
时
,内部上拉电阻把端口拉高,此
时
可以作为输入口使用。作为输入使用
时
,被外部拉低的引脚由于内部电阻的 原因,将输出电流(IIL)。此外,P1.0 和P1.2 分别作定
时
器/计数器2 的外部计 数输入(P1.0/T2)和
时
器/计数器2 的触发输入(P1.1/T2EX),具体如下表所 示。在flash 编程和校验
时
,P1 口接收低8 位地址字节。引脚号第二功能P1.0 T2 (定
时
器/计数器T2 的外部计数输入),
时
钟输出P1.1 T2EX(定
时
器/计数器 T2 的捕捉/ 重载触发信号和方向控制) P1.5 MOSI ( 在系统编程用) P1.6 MISO(在系统编程用)P1.7 SCK(在系统编程用) P2 口:P2 口是一个具有内部上拉电阻的8 位双向I/O 口,P2 输出缓冲器 能驱动4 个TTL 逻辑电平。对P2 端口写“1”
时
,内部上拉电阻把端口拉高,此
时
可以作为输入口使用。作为输入使用
时
,被外部拉低的引脚由于内部电阻的 原因,将输出电流(IIL)。在访问外部程序存储器或用16 位地址读取外部数据 存储器(例如执行MOVX @DPTR)
时
,P2 口送出高八位地址。在这种应用 第11 页共27 页 中,P2 口使用很强的内部上拉发送1。在使用8 位地址(如MOVX @RI)访问 外部数据存储器
时
,P2 口输出P2 锁存器的内容。在flash 编程和校验
时
,P2 口 也接收高8 位地址字节和一些控制信号。 P3 口:P3 口是一个具有内部上拉电阻的8 位双向I/O 口,p2 输出缓冲器能驱 动4 个TTL 逻辑电平。对P3 端口写“1”
时
,内部上拉电阻把端口拉高,此
时
可 以作为输入口使用。作为输入使用
时
,被外部拉低的引脚由于内部电阻的原 因,将输出电流(IIL)。P3 口亦作为AT89S52 特殊功能(第二功能)使用,如 下表所示。在flash 编程和校验
时
,P3 口也接收一些控制信号。 引脚号第二功能P3.0 RXD(串行输入)P3.1 TXD(串行输出)P3.2 INT0(外 部中断0)P3.3 INT0(外部中断0)P3.4 T0(定
时
器0 外部输入)P3.5 T1(定
时
器1 外部输入)P3.6 WR(外部数据存储器写选通)P3.7 RD(外部数据存储器写选通)。 RST: 复位输入。晶振工作
时
,RST 脚持续2 个机器周期高电平将使单片机复 位。看门狗计
时
完成后,RST 脚输出96 个晶振周期的高电平。特殊寄存器 AUXR(地址8EH)上的DISRTO 位可以使此功能无效。DISRTO 默认状态下,复 位高电平有效。ALE/PROG:地址锁存控制信号(ALE)是访问外部程序存储 器
时
,锁存低8 位地址的输出脉冲。在flash 编程
时
,此引脚(PROG)也用作 编程输入脉冲。在一般情况下,ALE 以晶振六分之一的固定频率输出脉冲,可 用来作为外部定
时
器或
时
钟使用。然而,特别强调,在每次访问外部数据存储 器
时
,LE 脉冲将会跳过。如果需要,通过将地址为8EH的SFR 的第0 位置“1”, ALE 操作将无效。这一位置“1”,ALE 仅在执行MOVX 或MOVC 指令
时
有 效。否则,ALE 将被微弱拉高。这个ALE 使能标志位(地址为8EH 的SFR 的 第0 位)的设置对微控制器处于外部执行模式下无效。PSEN:外部程序存储器选 通信号(PSEN)是外部程序存储器选通信号。当AT89S52 从外部程序存储器执 行外部代码
时
,PSEN 在每个机器周期被激活两次,而在访问外部数据存储器
时
,PSEN 将不被激活。EA/VPP:访问外部程序存储器控制信号。为使能从 0000H 到FFFFH 的外部程序存储器读取指令,EA 必须接GND。为了执行内部 程序指令,EA 应该接VCC。在flash 编程期间,EA 也接收12 伏VPP 电压。 XTAL1:振荡器反相放大器和内部
时
钟发生电路的输入端。XTAL2:振荡器反相 放大器的输出端。 ③特殊功能寄存器 特殊功能寄存器(SFR)的地址空间映象如表1 所示。 并不是所有的地址都被定义了。片上没有定义的地址是不能用的。读这些 地址,一般将 得到一个随机数据;写入的数据将会无效。用户不应该给这些未定义的地 址写入数据“1”。由于这些寄存器在将来可能被赋予新的功能,复位后,这些位 都为“0”。 定
时
器2 寄存器:寄存器T2CON 和T2MOD 包含定
时
器2 的控制位和状态位 (如表2 和表3 所示),寄存器对RCAP2H 和RCAP2L 是定
时
器2 的捕捉/自动 重载寄存器。 中断寄存器:各中断允许位在IE 寄存器中,六个中断源的两个优先级也可在IE 中设置。 3.1.2 显示电路 LCD 与LED 的区别。 第12 页共27 页 LED 仅仅是由8 个led 灯组成的数码显示器件,电路简单,操作容易。 LCD 是有点阵组成的显示器件,该器件电路和软件复杂,但是交互性好。 该系统展示给用于的数据为频率值,用LED 数码管显示即可。 LED 数码管按段数分为七段数码管和八段数码管,八段数码管比七段数码 管多一个发光二极管单元(多一个小数点显示);按能显示多少个“8”可分为1 位、2 位、4 位等等数码管;按发光二极管单元连接方式分为共阳极数码管和共 阴极数码管。共阳数码管是指将所有发光二极管的阳极接到一起形成公共阳极 (COM)的数码管。共阳数码管在应用
时
应将公共极COM 接到+5V,当某一字段 发光二极管的阴极为低电平
时
,相应字段就点亮。当某一字段的阴极为高电平
时
,相应字段就不亮。。共阴数码管是指将所有发光二极管的阴极接到一起形 成公共阴极(COM)的数码管。共阴数码管在应用
时
应将公共极COM 接到地线 GND 上,当某一字段发光二极管的阳极为高电平
时
,相应字段就点亮。当某一 字段的阳极为低电平
时
,相应字段就不亮。 数码管要正常显示,就要用驱动电路来驱动数码管的各个段码,从而显示 出我们要的数字,因此根据数码管的驱动方式的不同,可以分为静态式和动态 式两类。 ① 静态显示驱动 静态驱动也称直流驱动。静态驱动是指每个数码管的每一个段码都由一个 单片机的I/O 端口进行驱动,或者使用如BCD 码二-十进制译码器译码进行驱 动。静态驱动的优点是编程简单,显示亮度高,缺点是
占用
I/O 端口多,如驱动 5 个数码管静态显示则需要5×8=40 根I/O 端口来驱动,要知道一个89S51 单片 机可用的I/O 端口才32 个呢:),实际应用
时
必须增加译码驱动器进行驱动, 增加了硬件电路的复杂性。 ② 动态显示驱动 数码管动态显示接口是单片机中应用最为广泛的一种显示方式之一,动态 驱动是将所有数码管的8 个显示笔划"a,b,c,d,e,f,g,dp"的同名端连在一起,另外为 每个数码管的公共极COM 增加位选通控制电路,位选通由各自独立的I/O 线控 制,当单片机输出字形码
时
,所有数码管都接收到相同的字形码,但究竟是那 个数码管会显示出字形,取决于单片机对位选通COM 端电路的控制,所以我们 只要将需要显示的数码管的选通控制打开,该位就显示出字形,没有选通的数 码管就不会亮。通过分
时
轮流控制各个数码管的的COM 端,就使各个数码管轮 流受控显示,这就是动态驱动。在轮流显示过程中,每位数码管的点亮
时
间为 1~2ms,由于人的视觉暂留现象及发光二极管的余辉效应,尽管实际上各位数 码管并非同
时
点亮,但只要扫描的速度足够快,给人的印象就是一组稳定的显 示数据,不会有闪烁感,动态显示的效果和静态显示是一样的,能够节省大量 的I/O 端口,而且功耗更低。由于我们使用的FPGA 芯片的型号为EPF10K10, 有足够的IO 口分别去控制数码管的段选。这里我们采用动态显示方式。 由于FPGA 的IO 口没有足够的驱动能力去驱动数码管,所以需要数码管的 驱动电路,该驱动电路我们选择由三极管组成的电路,该电路简单,软件容易 实现。其中一个数码管的驱动电路图如图3.6 所示。 数码管为共阴极,当CS1=1
时
,即三极管Q9 被饱和导通,则数码管的公共 极被间接接地,数码管被选中,数据将在该管上显示,当CS=0
时
,三极管Q9 被截至,则数码管的公共极被没有接地,即使CSA,CSB,CSC,CSD,CSE, 第13 页共27 页 CSF,CSG,CSDP 被送入数据也不会有显示。 CSA,CSB,CSC,CSD,CSE,CSF,CSG,CSDP 分别为数码管的位选, 哪一位为“1”,即相应的三极管饱和导通,则相应的数码管段被点亮。“0”为截 止。相应的数码管段灭,这样数码管就有数字显示出来。 我们在该系统使用了4 个数码管,使用动态显示,即通过片选,是每个数码 管都亮一段
时
间,不断循环扫描,由于人的眼睛有一段
时
间的视觉暂留,所以 给人的感觉是每个数码管同
时
亮的,这样4 个数码管就把4 位十进制数据就显示 出来了。 数码管驱动电路:由于单片机芯片没有足够的能力驱动4 个数码管,因此需 要增加数码管驱动电路。 驱动电路我们可以选择由三极管组成的电路,该电路简单,程序容易实现. 3.1.3 待测信号产生电路 可变基准发生器模块的功能为:主要用于仿真外界的周期性变化的信号,用 于电路的测试,对频率的精度没有要求,只要能产生周期性变化的信号即可。 该部分不为频率计的组成部分,再加上为了节省成本我们使用LM555 芯片 组建的多谐振振荡器电路电路如图3.7 所示,电容C,电阻RA 和RB 为外接元 件,其工作原理为接通电源后,5V 电源经RA 和RB 给电容C 充电,由于电容 上电压不能突变,电源刚接通
时
,555 内部比较器A1 输出高电平,A2 输出低电 平,即RD=1,SD=0,基于RS 触发器置“1”,输出端Q 为高电平,此
时
,Q=0,使 A 1 2 f 3 g 4 e5 d A 6 8 c 7 DP 9 b10 a DS1 Q1 NPN Q2 NPN Q3 NPN Q4 NPN Q5 NPN Q6 NPN Q7 NPN Q8 NPN Q9 NPN VCC VCC VCC VCC VCC VCC VCC VCC A B C C D D E EF F G G DP DP AB 100 R1 100 R2 100 R3 100 R4 100 R5 100 R6 100 R7 100 R8 100 R9 1 2 3 4 5 6 7 8 9 P1 CS1 CSA CSA CSB CSB CSC CSC CSD CSD CSE CSE CSF CSF CSG CSG CSDP CSDP 图3.6 显示电路 第14 页共27 页 内部放电管截止。 当电容两端电压Vc 上升到大于5V 的电压的三分之一
时
,RD=1,SD=1,基本 RS 触发器状态不变,即输出端Q 仍为高电平,当电容两端电压Vc 上升到略大 于2*5V/3 是,RN=0,SD=1,基本RS 触发器置0,输出端Q 为低电平,这
时
Q=1, 使内部放电管饱和导通。于是电容C 经RB 和内部的放电管放电,电容两端电压 按指数规律减小。当电容两端电压下降到略小于5V 电压的三分之一
时
,内部比 较器A1 输出高电平,A2 输出低电平,基本RS 触发器置1,输出高电平,这
时
,Q=0,内部放电管截止,于是电容结束放电,如此循环不止,输出端就得 到了一系列矩形脉冲。如图3.8 所示。 电路参数的计算: 为了使Q 端输出频率可变,RB 用电位器来取代。 电容选择如果选择105的独石电容,即C=1uF= uF ,RA选1K的电10106 2 TRIG OUT 3 4 RST CVOL5T 6 THR 7 DISC 8 VCC GND1 U1 LM555CJ RA C VCC RB 5V VCC 图3.7 待测信号产生电路 图3.8 LM555 工作
时
电流变化 第15 页共27 页 阻,RB 选择5K的电位器,由公示f =1.443/RA+RBC计算可得:当RB=0
时
,f=1.443KHz, 当RB=5K
时
, f=240Hz, 由此可得, 该电路的输出频率范围为: 240~1443(Hz)。 元器件的简介 LM555/LM555C 系列是美国国家半导体公司的
时
基电路。我国和世界各大 集成电路生产商均有同类产品可供选用,是使用极为广泛的一种通用集成电 路。LM555/LM555C 系列功能强大、使用灵活、适用范围宽,可用来产生
时
间 延迟和多种脉冲信号,被广泛用于各种电子产品中。 555
时
基电路有双极型和CMOS 型两种。LM555/LM555C 系列属于双极 型。优点是输出功率大,驱动电流达200mA。而另一种CMOS 型的优点是功 耗低、电源电压低、输入阻抗高,但输出功率要小得多,输出驱动电流只有几 毫安。 另外还有一种双
时
基电路LM556,14 脚封装,内部有两个相同的
时
基电路 单元。 特性简介: 直接替换SE555/NE555。 定
时
时
间从微秒级到小
时
级。 可工作于无稳态和单稳态两种方式。 可调整占空比。 输出端可接收和提供200mA 电流。 输出电压与TTL 电平兼容。 温度稳定性好于0.005%/℃。 应用范围 精确定
时
。 脉冲发生 连续定
时
频率变换 脉冲宽度调制 脉冲相位调制 电路特点: LM555
时
基电路内部由分压器、比较器、触发器、输出管和放电管等组 成,是
模拟
电路和数字电路的混合体。其中6 脚为阀值端(TH),是上比较 器的输入。2 脚为触发端( TR ) , 是下比较器的输入。3 脚为输出端 (OUT),有0 和1 两种状态,它的状态由输入端所加的电平决定。7 脚为 放电端(DIS),是内部放电管的输出,它有悬空和接地两种状态,也是由输 入端的状态决定。4 脚为复位端(R),叫上低电平( 2/3VCC 是高电平 1, 1/3VCC 是高电平1,7V,由此可以看出 LM7805 将正常工作,输出电压为5V。电路如图3.10 所示。 元器件的选型与电路参数的计算: LM7805 芯片简介: 外形图及引脚排列H 7805 系列为3 端正稳压电路,TO-220 封装,能提供 多种固定的输出电压,应用范围广。内含过流、过热和过载保护电路。带散 热片
时
,输出电流可达1A。虽然是固定稳压电路,但使用外接元件,可获得 不同的电压和电流。 主要特点: 1 IN 3 OUT 2 GND U1 LM7805 Q1 PNP Q2 PNP Q3 NPN R1 R2 R3 0.33uF C1 0.1uF C2 D1 D2 1N4007 D3 D4 0.1uF C4 10UF C5 1 2 5V 图3.10 第20 页共27 页 输出电流可达2A。 输出电压有:5V。 过热保护。 短路保护。 输出晶体管SOA 保护。 7805 的功能框图如图3.11: 注意: 输入电压,即为纹波电压中的低值点,都必须高于所需输出电压2V 以 上。 当稳压器远离电源滤波器
时
,要求用C1。 CO 可改善稳定性和瞬态响应。 该模块的不足和对进一步完善提出建议: 该模块的不足: 转换的效率低:线性稳压器的效率直接与其调整管所消耗的功率有 关。调整管的功耗等于电流×(输入电压-输出电压),由此可见,有些情况下调整 管会产生较大损耗。例如,负载为1A
时
,将10V 的电压降至5V 输出,线性稳 压器的功耗为5W。效率将低于50%。该电路将会很耗电。 散热问题:由上可知线性稳压器的功耗将在高于总电路的50%,例如,我 们的电路功率为10W,那么线性稳压器的功率将会高于5W,这5W 的99%将通 过热量散失到外界,如果散热管理不适当将会使整个系统在高温下工作,影响 整个系统的性能之外,也严重的影响着整个系统的寿命。 提出建议: 线性稳压器的低效率迫使寻求新的改进方案,开关电源引起人们的关注。 根据开关电源的工作原理,在不同负载和电压下,一个设计良好的开关电源的 效率可达90%甚至更高。这相比线性稳压器,效率提高了40%。通过直观的比 较,开关电源降压的优势便体现出来了,其他开关电源的拓扑结构同样具有相 近或是更高的效率。开关电源设计不仅仅具有高效率这一主要优势,由于功耗 的降低还带来许多直接的好处。例如,与低效率的竞争产品相比,开关电源的 散热片面积大大减小。降低了对热管理的要求;而且更重要的是,由于器件不 会工作在低效的高温环境中,大大提高了器件的可靠性,进而延长工作寿命。 图3.11 第21 页共27 页 3.2 软件设计 3.2.1 编程语言的选择: 汇编和C 语言 汇编语言(Assembly Language)是面向机器的程序设计语言 在汇编语合中,用助记符(Memoni)代替操作码,用地址符号(Symbol)或标号 (Label)代替地址码。这样用符号代替机器语言的二进制码,就把机器语言变成 了汇编语言。于是汇编语言亦称为符号语言。 使用汇编语言编写的程序,机器不能直接识别,要由一种程序将汇编语言 翻译成机器语言,这种起翻译作用的程序叫汇编程序,汇编程序是系统软件中 语言处理系统软件。汇编程序把汇编语言翻译成机器语言的过程称为汇编。 汇编语言比机器语言易于读写、易于
调试
和修改,同
时
也具有机器语言执 行速度快,占
内存
空间少等优点,但在编写复杂程序
时
具有明显的局限性,汇 编语言依赖于具体的机型,不能通用,也不能在不同机型之间移植。 C 语言发展如此迅速, 而且成为最受欢迎的语言之一, 主要因为它具有强大 的功能。许多著名的系统软件, 如DBASE Ⅲ PLUS、DBASE Ⅳ 都是由C 语 言编写的。用C 语言加上一些汇编语言子程序, 就更能显示C 语言的优势了, 象PC- DOS 、WORDSTAR 等就是用这种方法编写的。归纳起来C 语言具有 下列特点: ①C 是中级语言 它把高级语言的基本结构和语句与低级语言的实用性结合起来。C 语言可 以象汇编语言一样对位、字节和地址进行操作, 而这三者是计算机最基本的工 作单元。 ② C 是结构式语言 结构式语言的显著特点是代码及数据的分隔化, 即程序的各个部分除了必 要的信息交流外彼此独立。这种结构化方式可使程序层次清晰, 便于使用、维 护以及
调试
。C 语言是以函数形式提供给用户的, 这些函数可方便的调用, 并具有多种循环、条件语句控制程序流向, 从而使程序完全结构化。 ③C 语言功能齐全 C 语言具有各种各样的数据类型, 并引入了指针概念, 可使程序效率更 高。另外C 语言也具有强大的图形功能, 支持多种显示器和驱动器。而且计算 功能、逻辑判断功能也比较强大, 可以实现决策目的。 ④C 语言适用范围大 C 语言比汇编更容易编写和移植,虽然该程序对
时
间要求比较严格但是如果 我们使用定
时
器的话对,这样就既可以
解决
用延
时
带来的不精确的问题,也提 高了编写程序的效率。 3.2.2 程序流程图: ⑴主程序 该计数器
时
通过计数或定
时
来完成计算待测信号的频率的,所以频率的计算 都是在中断里完成的。主函数的流程图如图3.12 为: 第22 页共27 页 检测一个信号首先在1 秒钟中内对待测频率计数,通过定
时
器0 来定
时
1 秒。 通过计数器1 对待测频率计数,通过这种方法检测出待测信号的频率,如果频率 小于2 的话,通过这种方法检测出来的频率精度会很低,所以如果频率低于2Hz, 用计数器1 来检测两个下降沿,在两个下降沿内,运行定
时
器0,通过这种方法 计算频率比较低的信号。 两种方案的选择由变量flag 控制,对一个未知频率信号,我们先假设该频率 高于2Hz,当用第一种方法检测出来的值小于2Hz,我通过对变量的控制执行第 二种方案。 定
时
器/计数器0 和定
时
器/计数器1 的主要作用: 首先当待测信号送入到频率计
时
,频率计将该信号作为频率大于2Hz 出来, 定
时
器/计数器0 设为定
时
模式,定
时
器/计数器1 设为计数模式。定
时
器0 的作 用为定
时
1 秒,在这一秒里,计数器1 对待测信号计数。由此可以测出待测的频 图3.12 主程序流程图 第23 页共27 页 率值,当检测到的频率值小于2Hz
时
,频率计自动转换到对低频信号处理模式, 定
时
器1 的作用将变为自动检测待测频率的下降沿,定
时
器0 的作用是在相邻的 两个下降沿里计
时
。由此可以测出频率小于2 的信号。 定
时
器0 的程序流程图如图3.13。计数器1 的程序流程图如图3.14 所示。 如图3.13 定
时
器0 中断流程序 图3.14 定
时
器1 中断流程图 Y N 第24 页共27 页 打开Keil C,单击“工程”菜单中的“目标Target1 属性”,跳出一个设置“目标 Target1 属性”的对话框。打开“输入”页,在产生执行文件的框里,把“E 生成HEX 文件”前的钩打上,重新编译,即工程所在的文件夹里会产生一个HEX 格式的文 件。 用keil C 即可产生的HEX 的二进制文件,既可以在PROTES 中仿真使用, 也可以下载到单片机中运行。 3.3 电路板的制作 3.3.1 元器件的封装 在设计装配方式之前,要求将系统的电路基本定型,同
时
还要根据整机的 体积以及机壳的尺寸来安排元器件在印刷电路板上的装配方式。 具体做这一步工作
时
,可以先确定好印刷电路板的尺寸,然后将元器件配 齐,根据元器件种类和体积以及技术要求将其布局在印刷电路板上的适当位 置。可以先从体积较大的器件开始,如电源变压器、磁棒、全桥、集成电路、 三极管、二极管、电容器、电阻器、各种开关、接插件、电感线圈等。待体积 较大的元器件布局好之后,小型及微型的电子元器件就可以根据间隙面积灵活 布配。二极管、电感器、阻容元件的装配方式一般有直立式、俯卧式和混合式 三种。 ①直立式。电阻、电容、二极管等都是竖直安装在印刷电路板上的。这种 方式的特点是:在一定的单位面积内可以容纳较多的电子元件,同
时
元件的排 列也比较紧凑。缺点是:元件的引线过长,所占高度大,且由于元件的体积尺 寸不一致,其高度不在一个平面上,欠美观,元器件引脚弯曲,且密度较大, 元器件之间容易引脚碰触,可靠性欠佳,且不太适合频率较高的电路采用。 ②俯卧式。二极管、电容、电阻等元件均是俯卧式安装在印刷电路板上 的。这样可以明显地降低元件的排列高度,可实现薄形化,同
时
元器件的引线 也最短,适合于较高工作频率的电路采用,也是目前采用得最广泛的一种安装 方式。 ③混合式。为了适应各种不同条件的要求或某些位置受面积所限,在一块 印刷电路板上,有的元器件采用直立式安装,也有的元器件则采用俯卧式安 装。这受到电路结构各式以及机壳内空间尺寸的制约,同
时
也与所用元器件本 身的尺寸和结构形式有关,可以灵活处理。 1、单片机: 单片机使用双列直插式DIP 封装,40 个引脚,每个引脚的距离为100mil。 封装模型如图3.18 所示: 图3.18 单片机PCB 模型 第25 页共27 页 2、数码管的封装: 数码管的封装采用LEDDIP-10,但是因为每个厂家生产出来的段选并不是都 是相同的,但是没必要重新设计数码管的封装,仅仅检查引脚分配即可,在本设 计使用的数码管引脚分配如图3.19 所示。 其他元器件封装: 电阻AXIAL 无极性电容RAD 电解电容RB 电位器VR 二极管DIODE 三极管、场效应管TO 电源稳压块78 系列TO-220 单排多针插座SIP 双列直插元件DIP 晶振XTAL1 3.5 软硬件结合测试 当给电板通电
时
,LM555 的3 号输出引脚的电压为2.5V 左右。说明输出脉 冲的占空比为50%。通过通过示波器查看波形,和理论的波形一致,通过调节 电位器可以改变输出波形的频率。 图3.19 元器件引脚映射 第26 页共27 页 数码管显示当调节电位器
时
,数码管的显示也是在理论范围只内的。 第27 页共27 页 致谢 在本论文结束之际,回想本科阶段的学习和生活,感慨甚多,毕业课题和 论文是在导师郑老师的指导下完成的,同
时
也要感谢自动化教研室的老师,感 谢他们的耐心指导。感谢所有帮助和支持过我的人。 郑老师对论文的进展付出了大量的汗水和心血,并给予了许多具体的实验 指导方案,在论文的最后成稿中提出了许多宝贵的意见,从而使论文的质量得 以提高,从郑老师身上,我学到的不仅是做学问、搞科研的态度、方法和毅 力,而且更多的是做人的准则。借此论文完成之际,向郑老师表示深深的谢 意! 最后,再一次向关心和帮助我的各位表示我衷心的感谢和深深的敬意!
单片机/工控
27,372
社区成员
28,771
社区内容
发帖
与我相关
我的任务
单片机/工控
硬件/嵌入开发 单片机/工控
复制链接
扫一扫
分享
社区描述
硬件/嵌入开发 单片机/工控
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章




 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享