以三组IMU(惯性测量单元)模块为基础实现肢体动作捕捉。提升人机交互的灵活度及自由度,例如在游戏中实现角色与玩家的动作同步或用于机械臂同步控制、牵引控制等。支持拓展,兼容第三方设备的姿态数据融合。

独有的初始化算法,可直接找到不同模块之间的初始姿态偏差。可直接使用非绝对姿态(如六轴IMU模块、未校准的九轴IMU模块、其它使用独立参考系的模块)的姿态数据进行计算。降低装配或穿戴要求,免去重复校准的麻烦。
产品介绍
一、硬件
a) X-Unit(姿态计算单元)
由“IMU+MCU”构成,独立计算自身的运动姿态,输出右手坐标系下的四元数。仅支持I2C通信。可通过I2C(Master)控制单元开始/停止运算、校准、获取当前姿态、IAP更新固件。MCU不做加密,保留了SWD接口,有需要可擦除或重新覆盖整颗芯片。
b) X-Core(主控)
可通过USB或串口与上位机通信。串口可连接USB转串口模块或其它无线透传模块。上位机可以控制运算启停、校准所有连接的计算单元、IAP更新主控及计算单元的固件、接收运算结果。
默认使用USB供电,预留了电源接口,可根据需要自行焊接电池。

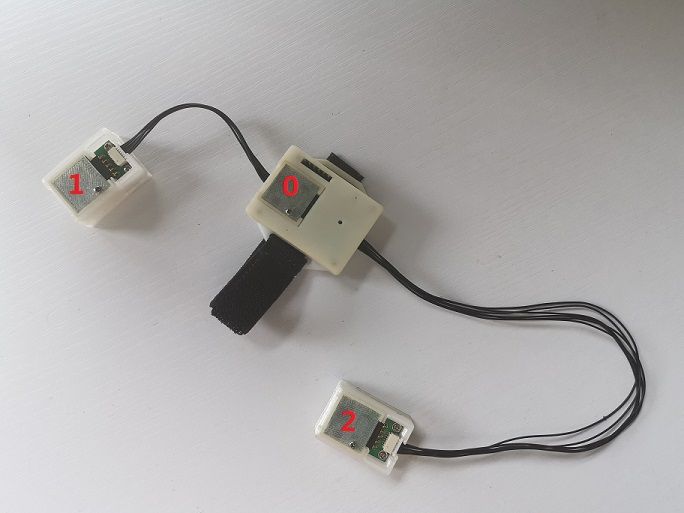
默认连接三个姿态计算单元。可根据需求去掉下图中的1号或2号计算单元,但必须保留0号计算单元。其中1号计算单元可替换为动捕手套(后期即将上线),或连接符合通信协议的拓展外设(如手柄)。
二、软件服务
a) 运算模式
X-Core的运算模式分为两种:“直接输出单元姿态”和“初始化单元姿态偏差”。
1) 直接输出单元姿态
默认运行该模式。主控实时采集每个单元的原始姿态数据,并直接发送给上位机,输出频率最高可达200Hz。
2) 初始化模块姿态偏差
在动捕运用领域,需要获得每个姿态计算单元之间在初始位置下的姿态偏差。上位机可随时发送指令让主控进入该运算模式,计算完成后输出计算结果并回到默认的“直接输出单元姿态”模式,参加演示视频。上位机根据每个单元的实时姿态、初始位置下的姿态偏差,结合反向运动学即可实现肢体的动作捕捉。
如需融合第三方硬件的姿态,可通过I2C按规定协议与主控通讯,也可以通过USB或串口在该模式下将姿态数据实时发送至主控。第三方硬件的姿态数据必须为右手坐标系下的四元数。
b) 固件更新
提供固件更新软件。通过USB口与PC连接,利用软件完成主控及姿态运算单元的固件更新。支持固件版本向下更新、强制更新。若更新过程意外中断,硬件重新上电后会自行恢复至原来的版本。
三、资源
a) 设计文件
提供所有线路板及外壳的CAD文件。如有需要可申请硬件的原理图、PCB文件、BOM表;
提供工程案例中涉及到的机械臂CAD文件。
b) 工程案例及源码
提供Processing、Unity、ROS下的工程案例及源码。不定期增加及更新工程案例及源码。
c) 资料
提供硬件规格书、协议、使用说明书;
提供关于IMU的入门、姿态融合算法等资料;
提供关于动作捕捉的入门、反向运动学资料;
提供在Unity及ROS下实现骨骼绑定及机械臂同步/牵引控制的教程;
提供在Unity及ROS下导入机械臂模型或建模的指导教程。
四、发货清单
官方售价 380元/套 可自行 淘宝搜索 最小动捕模块
X-Unit x 3
X-Core x 1
X-Unit 连接线 x 2
Micro USB数据线 x 1
魔术贴松紧绑带 x 3
注意:不含电池;产品外壳全部为3D打印成形。
最小动捕系统(演示)-科技-高清完整正版视频在线观看-优酷 https://v.youku.com/v_show/id_XNDI4MzcyNzgyNA==.html?spm=a2h0k.11417342.soresults.dposter




 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享