社区
工具平台和程序库
帖子详情
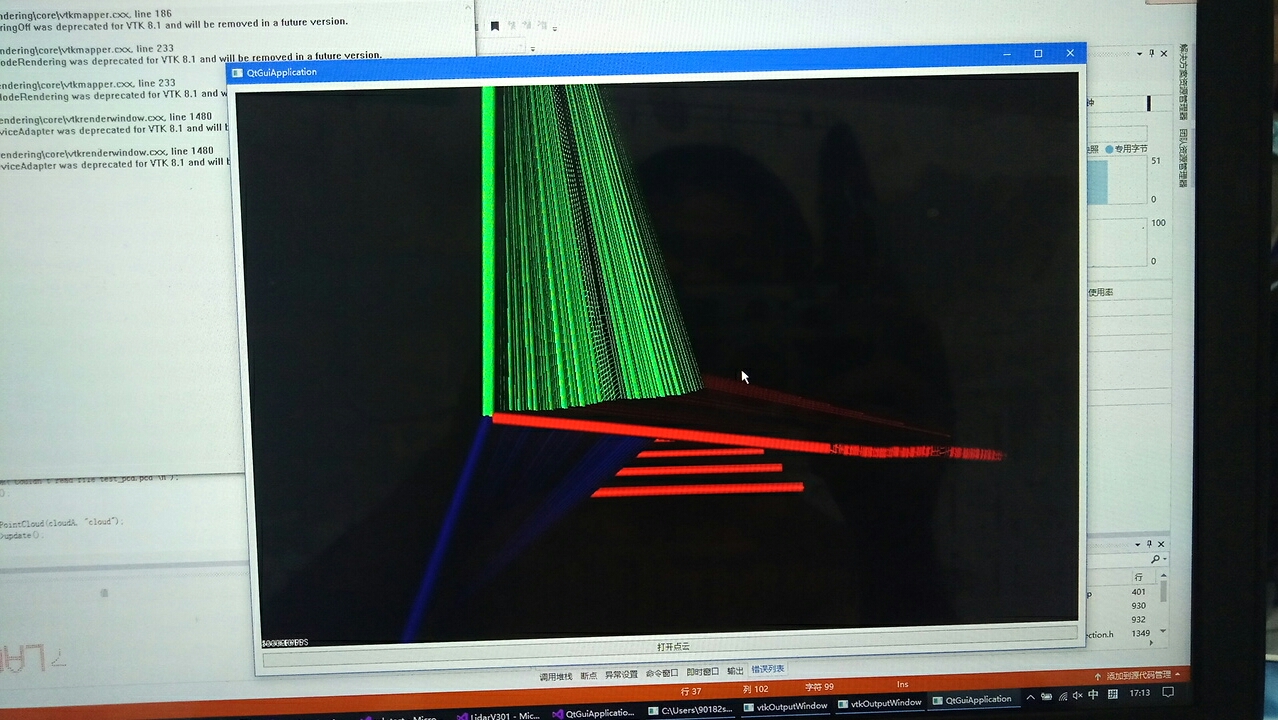
PCL cloudviewer重叠显示,无法刷新
点睡
2019-09-09 03:12:05
用着用着,突然不会清空了,所有显示都叠一起了,有谁遇到过吗,帮帮忙,正在做项目中途给我来个这种太让人奔溃了
...全文
150
回复
打赏
收藏
PCL cloudviewer重叠显示,无法刷新
用着用着,突然不会清空了,所有显示都叠一起了,有谁遇到过吗,帮帮忙,正在做项目中途给我来个这种太让人奔溃了
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
赵4老师
2019-09-09
打赏
举报
回复
代码功能归根结底不是别人帮自己看或讲解或注释出来的;而是被自己静下心来花足够长的时间和精力亲自动手单步或设断点或对执行到某步获得的中间结果显示或写到日志文件中一步一步分析出来的。 提醒:再牛×的老师也无法代替学生自己领悟和上厕所! 单步调试和设断点调试(VS IDE中编译连接通过以后,按F10或F11键单步执行,按Shift+F11退出当前函数;在某行按F9设断点后按F5执行停在该断点处。)是程序员必须掌握的技能之一。
Cloud
View
er
简单说,是
PC
L(点云库)提供的“轻量级点云可视化工具”,目的是让你用最少的代码,快速把点云
显示
出来。优点:用法简单,几行代码就能实现可视化;缺点:不支持多线程(线程不安全),如果需要在多线程程序中用,得用更强大的(后面会提到)。内部其实是用实现的,但它运行在单独的线程中。如果想自定义可视化效果(比如改背景色、加点图形、动态更新文字),不能直接操作,必须用“回调函数”。回调函数就像 “钩子”,会在可视化线程中被自动调用,避免多线程冲突。
AI算力时代的先进封装:Chiplet、HBM与异构集成的产业机会.docx
AI算力时代的先进封装:Chiplet、HBM与异构集成的产业机会
JavaWeb程序设计作业答案.rar
源码下载地址: https://pan.quark.cn/s/8d2c461c797c JavaWeb程序设计构成了掌握Web交互式应用程序开发的核心领域,对于初学者来说,精通这一技术具有决定性意义。在“JavaWeb程序设计(第三版)作业答案”中,我们可以预期获得针对该教材习题的一系列深入解析,从而协助学习者强化知识体系。 JavaWeb所包含的技术组件涵盖了S
er
vlet、JSP(JavaS
er
v
er
Pages)、JDBC(Java Database Connectivity)以及各类框架如Spring MVC、Struts等。S
er
vlet是Java平台提供的一种扩展服务器功能的接口,能够处理HTTP请求并生成相应的反馈。JSP则是一种用于构建动态网页的工具,它支持开发者将HTML代码与Java代码进行整合编写,从而简化了Web应用程序的开发流程。 作业答案通常会涉及以下几个核心内容: 1. **S
er
vlet基础**:可能包含S
er
vlet生命周期、init(), s
er
vice(), destroy()方法的应用,以及如何在web.xml文件中设定S
er
vlet的映射关系。 2. **JSP基础**:JSP的九大内置对象,如request、response、session、application等的使用,以及EL(Expression Language)和JSTL(JavaS
er
v
er
Pages Standard Tag Library)的实际操作。 3. **HTTP协议理解**:GET和POST请求方法的差异,请求头与响应头的应用,以及会话管理的概念阐释。 4. **JDBC数据库操作**:与数据库建立连接,执行SQL指令,处理查询结果集,以及...
斐讯K2固件合集-下载即用.zip
源码链接: https://pan.quark.cn/s/a4b39357ea24 斐讯K2是一款广受用户青睐的无线路由器,其运行表现稳定且具备较高的可操作性,在DIY爱好者群体中拥有极高的声誉。本资料将系统性地阐述斐讯K2的固件刷机方法及其关联的技术要点。固件升级是路由器爱好者改善设备性能、扩展功能的一种普遍手段,经由替换出厂固件,能够达成更加个性化的网络配置、增强安全防护等目标。斐讯K2固件资源库涵盖了多种知名的非官方固件,诸如Tomato Pheonix 不死鸟、高恪、PandoraBox 潘多拉等,这些固件均具备独特的优势,能够适配不同用户的需求。 1. Tomato Pheonix 不死鸟:Tomato是一款立足于Linux的开源固件,以其精巧、高效而备受推崇。不死鸟版本是专门为华硕及斐讯路由器优化的分支,提供了卓越的QoS(服务质量)配置、详尽的图表监控以及便捷的固件升级途径。对于那些需要精准调控带宽和监测网络状态的用户而言,这是一个理想的选项。 2. 高恪:高恪固件是OpenWrt的定制化版本,着重于操作的便捷性和运行的可靠性,特别适合对路由器操作不甚熟悉的用户群体。它提供了一些实用的功能,例如内置的广告屏蔽、快速测速工具等,同时保留了OpenWrt的适应性。 3. PandoraBox 潘多拉:潘多拉盒是另一款基于OpenWrt的固件,它以丰富的插件库和强大的自定义潜力而闻名。用户能够依据个人需求安装各类插件,实现更多功能,如远程接入、DDNS(动态域名解析服务)等。 4. 官方固件的纯净版本与定制版本:官方固件通常更侧重于稳定性,纯净版意味着未预置额外的应用或服务,适合注重稳定性的用户。定制版则可能包含了制造商的特色功能或优...
工具平台和程序库
24,851
社区成员
27,330
社区内容
发帖
与我相关
我的任务
工具平台和程序库
C/C++ 工具平台和程序库
复制链接
扫一扫
分享
社区描述
C/C++ 工具平台和程序库
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章




 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享