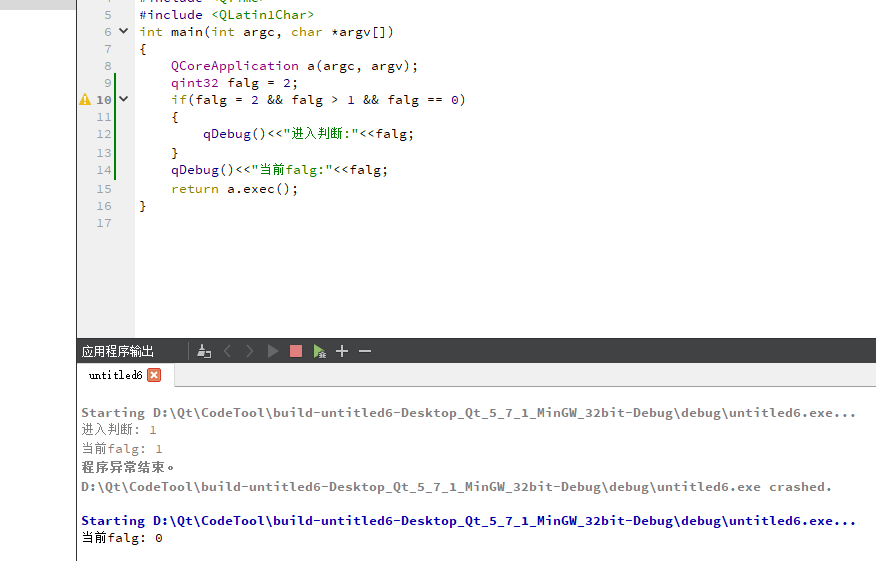
falg=(2&&falg>1&&falg==0) 2&&falg>1&&falg==0 ---->true&&true&&false ----> false ---->0 so falg=0
21,495
社区成员
26,692
社区内容
加载中
试试用AI创作助手写篇文章吧


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享


