社区
图形处理/算法
帖子详情
数据平滑处理,拟合过渡圆弧
zhouyj-csdn
2020-04-07 07:27:36
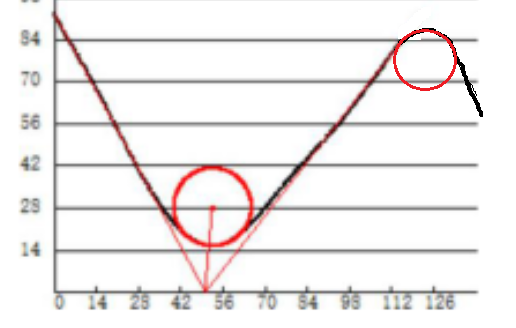
当前我有一组数据,呈曲线如图,我需要对曲线的凹凸处进行圆弧拟合,进而求出圆半径
目前毫无头绪,请大家支招,提供一些思路。
...全文
589
2
打赏
收藏
数据平滑处理,拟合过渡圆弧
当前我有一组数据,呈曲线如图,我需要对曲线的凹凸处进行圆弧拟合,进而求出圆半径 目前毫无头绪,请大家支招,提供一些思路。
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
2 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
woshi_hujunjun
2020-04-09
打赏
举报
回复
这纯粹就是个拟合圆弧的问题,平滑降噪只是常规操作。拟合圆网上有很多算法,关键是自己要搞清楚怎么筛选点。比如你可以先找到直线,在把直线下的点全部擦除,这样剩下的就是圆弧的点。再取点来拟合。
zgl7903
2020-04-08
打赏
举报
回复
https://wenku.baidu.com/view/2f7f28c55fbfc77da269b191.html
Halcon实战:基于亚像素边缘检测的
圆弧
精准
拟合
技术
本文围绕工业视觉中高精度
圆弧
检测需求,详解基于Halcon的亚像素边缘检测与
圆弧
拟合
全流程:包括Canny算子参数调优、XLD轮廓分割与筛选、fit_circle_contour_xld多种算法对比及适用场景、ROI优化、不完整
圆弧
处理
、
拟合
结果验证(半径范围、平均误差、轮廓长度)及光照鲁棒性增强方法,强调亚像素精度是实现微米级检测的前提。
机器人轨迹规划:简单的笛卡尔空间/关节空间轨迹规划方案
本文探讨了关节空间同步运动、
平滑
性
处理
、曲线速度规划、动力学约束及自适应
过渡
策略,涉及加加速度控制、jerk/torque/snap约束,以及原始
数据
拟合
和混合空间
过渡
技术。适合对轨迹规划和机器人运动控制感兴趣的读者。
matlab如何将直线变成弧线,一段直线离散点可以
拟合
成
圆弧
吗
通过给出的一组直线离散点,探讨如何使用数学方法将它们
拟合
成一条
平滑
的
圆弧
路径,涉及
数据
处理
和曲线
拟合
技术。
基于A星算法的路径规划
平滑
优化算法(拐点的
圆弧
化
处理
)A星算法+路径优化Matlab实现
本文聚焦于A星算法生成的折线路径在实际应用中的
平滑
优化问题,重点阐述拐点识别与
圆弧
化
处理
原理。针对机器人或自动驾驶等受运动学约束的场景,提出基于最小转弯半径的几何
圆弧
插补方法,实现路径连续曲率
过渡
。算法包含拐点判定、圆心与角度计算、障碍物避让校验等关键步骤,在Matlab平台完成端到端实现。
图形处理/算法
19,466
社区成员
50,678
社区内容
发帖
与我相关
我的任务
图形处理/算法
VC/MFC 图形处理/算法
复制链接
扫一扫
分享
社区描述
VC/MFC 图形处理/算法
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章



 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享