社区
VCL组件使用和开发
帖子详情
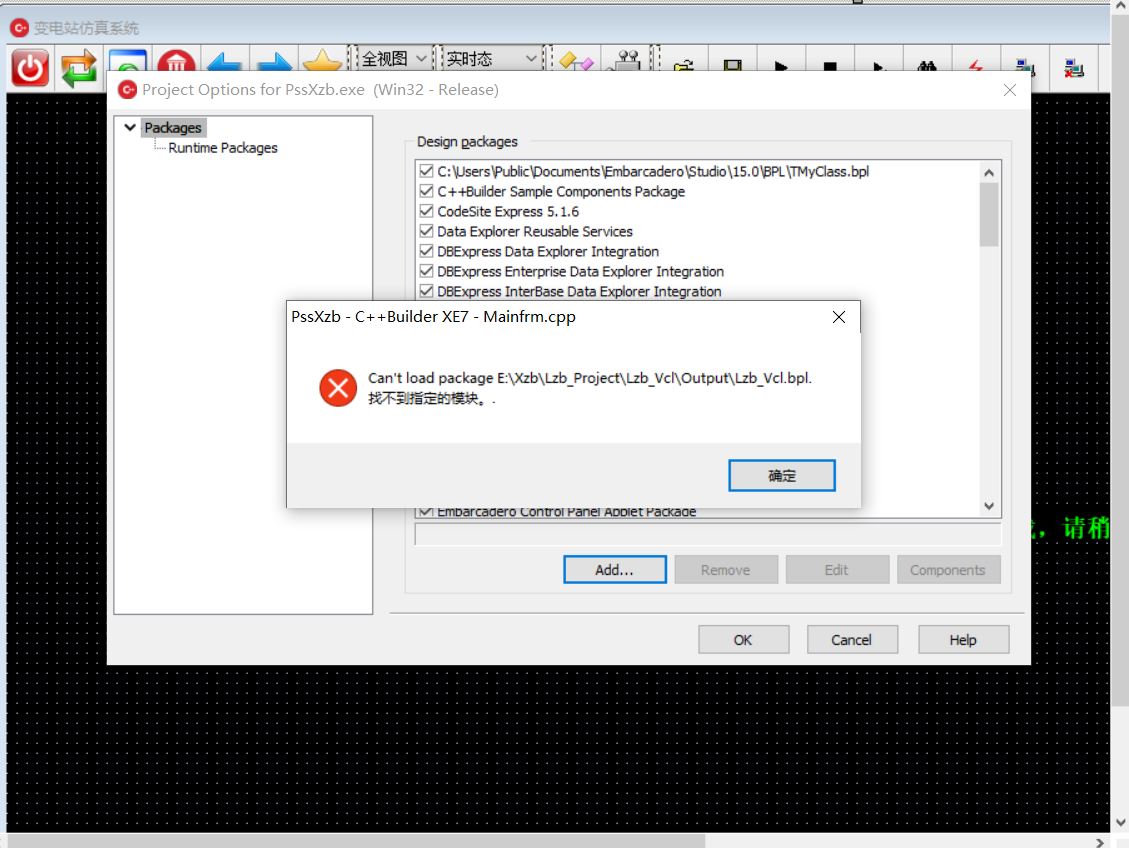
加入之前在一个项目自定义的组件包,也设置路径了,为什么会出现这个问题,求大神解惑
jzjzzlm
2020-05-21 06:34:54
...全文
600
2
打赏
收藏
加入之前在一个项目自定义的组件包,也设置路径了,为什么会出现这个问题,求大神解惑
[图片]
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
2 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
jzjzzlm
2020-05-22
打赏
举报
回复
但是添加相应得bpl文件它说找不到相应得模块
ooolinux
2020-05-21
打赏
举报
回复
那个add不是可以添加组件吗?
【EA电池SPM参数化】Matlab构建的简化单粒子SPM电化学模型,ESP,SP,
包
含测试数据,参数辨识代码以及验证的简化电化学模型P2D,锂离子电池,降阶电化学模型
内容概要:本文系统介绍了基于Matlab构建的简化单粒子(SPM)电化学模型及其参数化方法,聚焦于锂离子电池的降阶电化学模型P2D的简化实现,涵盖模型建立、参数辨识、测试数据提供及仿真验证全流程。资源核心在于深入剖析电化学模型的关键参数提取与优化过程,帮助科研人员理解电池内部反应机理与数学建模范式,支持后续的模型扩展与工程应用。文档不仅提供了完整的SPM模型代码与参数拟合工具,还整合了丰富的科研辅助资源,
包
括智能优化算法、机器学习、电力系统管理、
路径
规划、信号处理等多个领域的Matlab/Simulink仿真案例与Python实现方案,极大拓展了该模型在电池健康状态(SOH)估计、寿命预测、充放电控制策略等方向的应用潜力。; 适合人群:具备一定Matlab编程能力,从事新能源技术、电化学建模、电池管理系统(BMS)、储能控制、自动化仿真等相关领域的研究生、科研人员及工程技术人员。; 使用场景及目标:①开展锂离子电池电化学模型的建模与参数辨识研究;②实现P2D与SPM降阶模型的仿真与实验验证;③结合实测数据进行模型参数拟合与精度优化;④拓展应用于电池老化分析、SOH估算、充放电策略设计及储能系统动态响应研究。; 阅读建议:建议读者按照文档结构循序渐进学习,重点研读SPM模型构建与参数辨识章节,结合所提供的测试数据与代码进行动手实践,并积极借鉴附带的智能算法与机器学习模块以提升模型鲁棒性与预测精度。
政府科技管理部门如何提升科技成果转化
项目
的评估准确性与效率?.docx
政府科技管理部门如何提升科技成果转化
项目
的评估准确性与效率?
C#指定窗口上覆盖指示灯,IO 串口操作
C#指定窗口上覆盖指示灯,IO 串口操作
高校技术转移办公室在完成成果转化
项目
备案时,审核要点是什么?.docx
科易网基于40亿+科创知识图谱数据库,深度探索AI技术在技术转移、成果转化、技术经纪、知识产权、产业创新、科技招商等垂直领域的多样化应用场景,研究科技创新领域的AI+数智化解决方案,推动科技创新与产业创新智能化发展。
Trading-Dataset-Calendar-Alignment-v1.0-原创源码与文档.zip
原创本地工程审计与分析工具合集中的独立资源
包
。
包
含完整源码、3项自动化测试、可复现合成示例、离线HTML、JSON与SVG报告、1080×720真实运行效果图、README、运行说明、功能清单、MIT License及原创与授权声明。使用方法:解压后进入project目录,执行npm test验证算法,执行npm run report生成报告,也可通过本地静态服务器打开网页。运行时零第三方依赖,不
包
含热点产品或开源
项目
源码、Logo、官方截图、论文、生产日志或其他受限素材。适合前端开发、AI应用工程、测试审计和课程实践。
VCL组件使用和开发
604
社区成员
13,456
社区内容
发帖
与我相关
我的任务
VCL组件使用和开发
C++ Builder VCL组件使用和开发
复制链接
扫一扫
分享
社区描述
C++ Builder VCL组件使用和开发
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章




 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享