相机标定问题,请教大佬
现有设备用于产品贴合,4只相机,分两个工位,每工位2只。
工位一:相机A1,A2,由上向下拍照,相机固定于单轴上,做相向或相背运动(满足于平台S的尺寸切换)。机台上有小平台S(x方向单轴运动,可旋转)。相机用来定位S的位置。
工位二:相机B1,B2,由下向上拍照,相机固定于单轴上,做相向或相背运动(满足于产品P的尺寸变化)。用于定位产品P的位置。
搬运轴:只做Y方向移动。无x方向动作,无旋转。
动作流程,①产品P进入工位二,相机B1,B2定位位置。
②相机A1,A2定位平台S的位置,将其调整到与P同样的角度和X方向偏差。
③由搬运轴,将P直接搬运贴合到S。
请教下各位大佬,如何标定这两组相机。或者是否世界坐标不适用于此类情况的贴合。


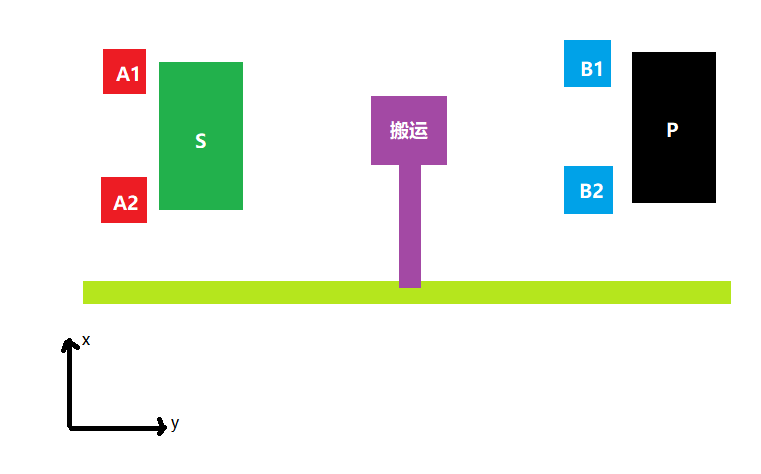 大体示意如图。
大体示意如图。

 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享

