社区
脚本语言
帖子详情
ImportError: No module named 'win32api' 报错怎们办?
weixin_47048763
2020-09-04 10:15:15
显示报错后进行操作pip install pypiwin32
显示已安装,再次运行,依然显示无模块。不知道怎么处理了。
...全文
845
1
打赏
收藏
ImportError: No module named 'win32api' 报错怎们办?
显示报错后进行操作pip install pypiwin32 显示已安装,再次运行,依然显示无模块。不知道怎么处理了。
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
1 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
庸了个白
2020-09-04
打赏
举报
回复
pip install pywin32 ,安装后重新打开。一般自带都有,没有就自求多福吧
python
报错
Module
NotFoundError: No
module
named
'
win32
api
' //import
win32
api
ImportError
: DLL load fai
大概的错误就是: import
win32
api
ImportError
: DLL load failed: 找不到指定的程序。 具体点: [I 20:32:41.034 NotebookApp] Serving notebooks from local directory: C:\Users\17520 [I 20:32:41.034 NotebookApp] The Jupyter Noteb...
解决在Python中使用
Win32
api
报错
的问题,No
module
named
win32
api
一、系统环境 操作系统: Win7 64位 Python:3.7.0 二、在使用import
win32
api
时,
报错
:No
module
named
win32
api
网上查到有下面解决
办
法: 方法1:pip install pypi
win32
或pip3 install pypi
win32
或 python -m pip install pypi
win32
, 我在我两台机器...
Scrapy运行
ImportError
: No
module
named
win32
api
Scrapy执行时
报错
:
ImportError
: No
module
named
win32
api
windows系统上出现这个问题的解决需要安装Py32Win模块 : pip install pypi
win32
Python运行scrapy
报错
:
ImportError
: No
module
named
win32
api
一、问题描述 运行scrapy项目就
报错
:
ImportError
: No
module
named
win32
api
找不到
win32
api
模块。。。 二、解决方法 运行命令安装模块: pip install pypi
win32
python3问题-运行爬虫程序时候
ImportError
: No
module
named
win32
api
运行爬虫程序时候
ImportError
: No
module
named
win32
api
windows系统上出现这个问题的解决需要安装Py32Win模块,但是直接通过官网链接装exe会出现几百个错误,更方便的做法是 pip install pypi
win32
最近写python遇到的一些问题,望给大家一点帮助。我是小王,CSDN博客:https://blog.csdn.net/cmqwan ...
脚本语言
37,738
社区成员
34,211
社区内容
发帖
与我相关
我的任务
脚本语言
JavaScript,VBScript,AngleScript,ActionScript,Shell,Perl,Ruby,Lua,Tcl,Scala,MaxScript 等脚本语言交流。
复制链接
扫一扫
分享
社区描述
JavaScript,VBScript,AngleScript,ActionScript,Shell,Perl,Ruby,Lua,Tcl,Scala,MaxScript 等脚本语言交流。
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
试试用AI创作助手写篇文章吧
+ 用AI写文章


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享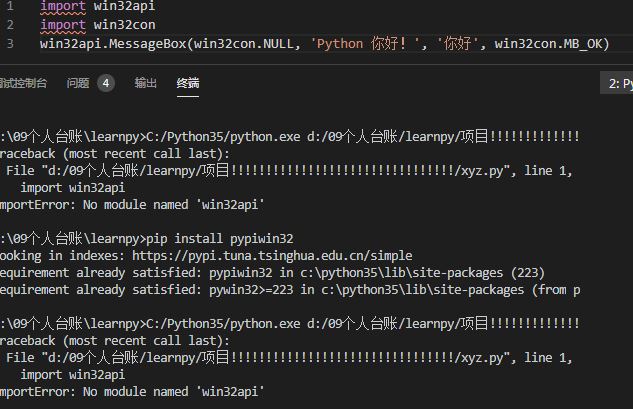

 python报错 ModuleNotFoundError: No module named 'win32api' //import win32api ImportError: DLL load fai
python报错 ModuleNotFoundError: No module named 'win32api' //import win32api ImportError: DLL load fai

