



568
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享CNNNetwork InferenceEngine::Core::ReadNetwork(
const std::string & modelPath,
const std::string & binPath = {}
) constmodel = torchvision.models.resnet18(pretrained=True).eval()
dummy_input = torch.randn((1, 3, 224, 224))
torch.onnx.export(model, dummy_input, "resnet18.onnx")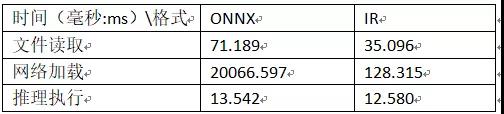
ExecutableNetwork InferenceEngine::Core::LoadNetwork(
const CNNNetwork & network,
const std::string & deviceName,
const std::map< std::string, std::string > & config = {}
)
from __future__ import print_function
import cv2
import numpy as np
import time
import logging as log
from openvino.inference_engine import IECore
with open('imagenet_classes.txt') as f:
labels = [line.strip() for line in f.readlines()]
def image_classification(use_onnx=False):
model_xml = "resnet18.xml"
model_bin = "resnet18.bin"
onnx_model = "resnet18.onnx"
# Plugin initialization for specified device and load extensions library if specified
log.info("Creating Inference Engine")
ie = IECore()
# Read IR
log.info("Loading network files:\n\t{}\n\t{}".format(model_xml, model_bin))
inf_start = time.time()
if use_onnx:
# 直接使用ONNX格式加载
net = ie.read_network(model=onnx_model)
else:
# IR 格式加载
net = ie.read_network(model=model_xml, weights=model_bin)
load_time = time.time() - inf_start
print("read network time(ms) : %.3f"%(load_time*1000))
log.info("Preparing input blobs")
input_blob = next(iter(net.input_info))
out_blob = next(iter(net.outputs))
# Read and pre-process input images
n, c, h, w = net.input_info[input_blob].input_data.shape
src = cv2.imread("D:/images/messi.jpg")
# image = cv2.dnn.blobFromImage(src, 0.00375, (w, h), (123.675, 116.28, 103.53), True)
image = cv2.resize(src, (w, h))
image = np.float32(image) / 255.0
image[:, :, ] -= (np.float32(0.485), np.float32(0.456), np.float32(0.406))
image[:, :, ] /= (np.float32(0.229), np.float32(0.224), np.float32(0.225))
image = image.transpose((2, 0, 1))
# Loading model to the plugin
log.info("Loading model to the plugin")
start_load = time.time()
exec_net = ie.load_network(network=net, device_name="CPU")
end_load = time.time() - start_load
print("load time(ms) : %.3f" % (end_load * 1000))
# Start sync inference
log.info("Starting inference in synchronous mode")
inf_start1 = time.time()
res = exec_net.infer(inputs={input_blob: [image]})
inf_end1 = time.time() - inf_start1
print("infer onnx as network time(ms) : %.3f" % (inf_end1 * 1000))
# Processing output blob
log.info("Processing output blob")
res = res[out_blob]
label_index = np.argmax(res, 1)
label_txt = labels[label_index[0]]
inf_end = time.time()
det_time = inf_end - inf_start1
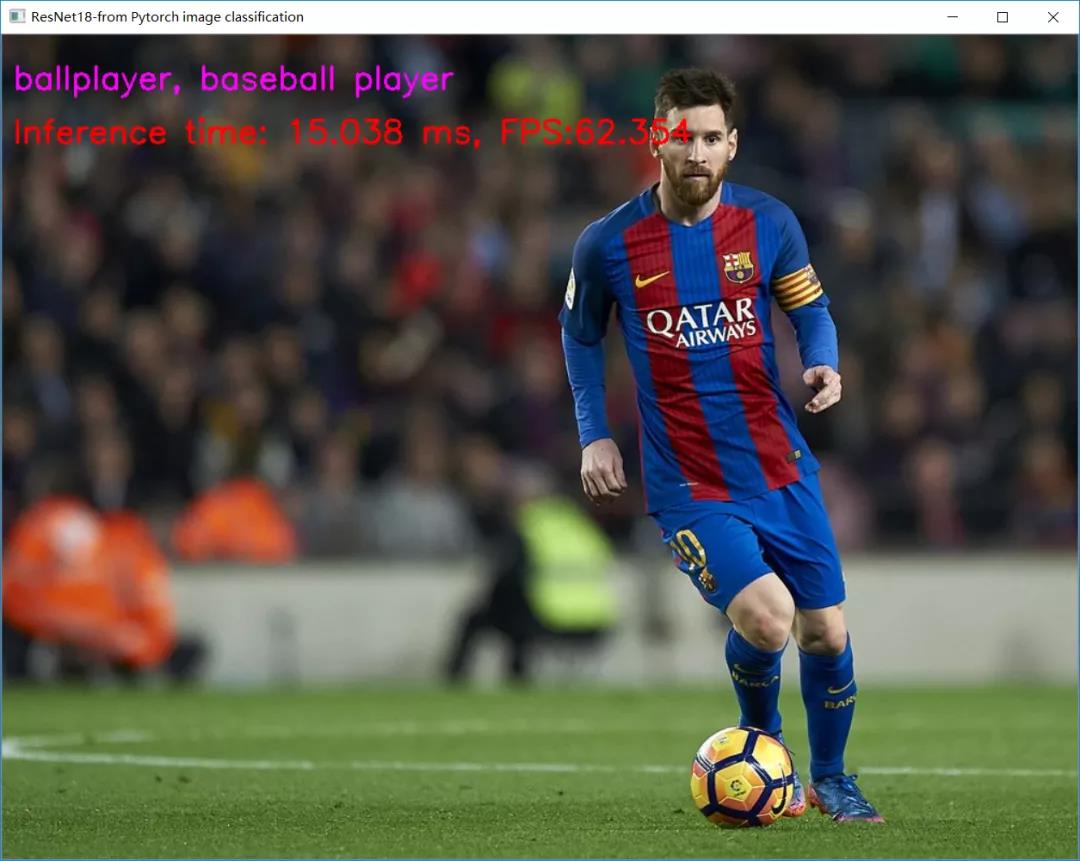
inf_time_message = "Inference time: {:.3f} ms, FPS:{:.3f}".format(det_time * 1000, 1000 / (det_time * 1000 + 1))
cv2.putText(src, label_txt, (10, 50), cv2.FONT_HERSHEY_SIMPLEX, 1.0, (255, 0, 255), 2, 8)
cv2.putText(src, inf_time_message, (10, 100), cv2.FONT_HERSHEY_SIMPLEX, 1.0, (0, 0, 255), 2, 8)
cv2.imshow("ResNet18-from Pytorch image classification", src)
cv2.waitKey(0)
cv2.destroyAllWindows()
if __name__ == '__main__':
image_classification(True)

