瑞昱的 RTL8722DM 单片机开发板现在支持通过 MicroPython 运行 Python 代码。可以通过 MicroPython 中的 REPL 使用 Python 控制 GPIO 和其他外设.
材料准备
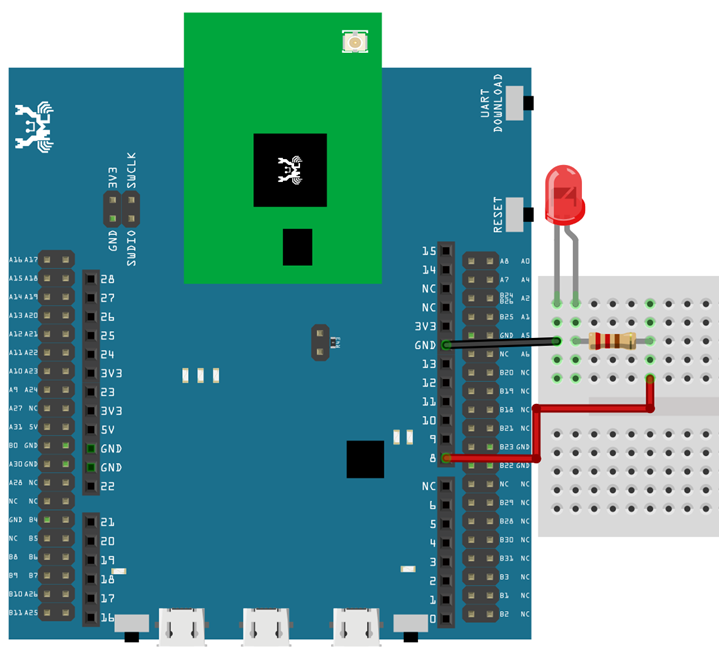
RTL8722DM x 1, LED x 1, 电阻(220欧姆) x 1
范例说明
闪烁 LED 是开始了解并使用 MicroPython 最好示例。
首先,如下图所示将 PB_22 引脚连接到与限流电阻串联的 LED 的阳极引脚,再将 GND 连接到 LED 的阴极引脚:
然后,复制以下代码并在 REPL 界面中按 Ctrl + E 进入 REPL 的粘贴模式。如果使用 Tera Term,只需右键单击终端的任何空白处即可将代码粘贴到 REPL,然后按 Ctrl + D 执行代码。如果一切正常,就可以看到 LED 在3秒钟内闪烁3次。
from machine import Pin
a = Pin("PB_22", Pin.OUT)
a.value(1)
time.sleep_ms(500)
a.value(0)
time.sleep_ms(500)
a.on()
time.sleep_ms(500)
a.off()
time.sleep_ms(500)
a.toggle()
time.sleep_ms(500)
a.toggle()




 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享