最近在做PID控制的参数整定时,遇到了如何判断控制效果的问题:
下面两张图分别使用了两组Kp、Ki、Kd参数,输入信号为阶跃函数,得到的响应
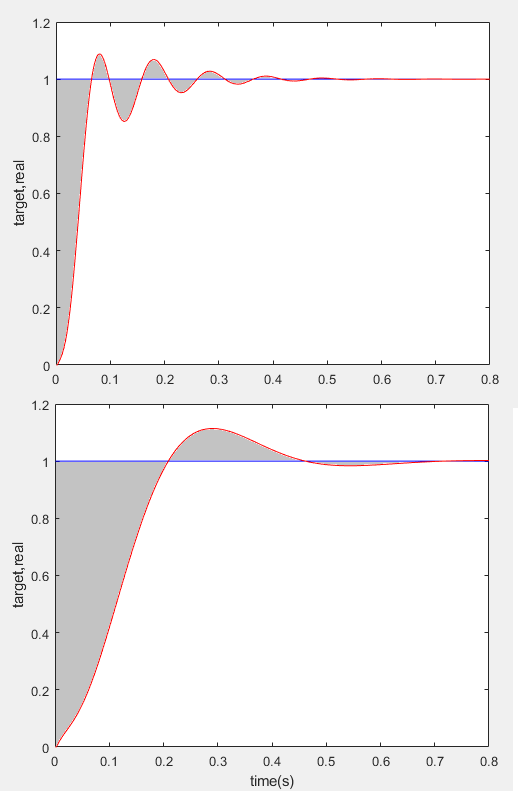
图中红线是PID控制下的系统输出,蓝线是输入的阶跃信号,直观的可以看出,和上图相比,下图响应较慢,且超调偏大,所以上图的PID参数优于下图。
图中这样的有明显差别的情况下,可以直观的得出结论,但是在较精细的参数调整过程中,两组参数的响应对比,差异就会很小,人眼很难直观的做出优劣判断,也就无法选取较优的那组参数了。我想到的解决方法是求取不同时刻下,系统响应(红线)和系统输入(蓝线)之间的误差,即用图中的阴影面积表示系统响应和系统输入信号的偏差。该面积越小,即系统响应越接近输入信号,则说明这时的PID参数就是越优的。
在网上找了半天,发现自动控制关理论似乎并没涉及这方面问题,也没看到有人讨论这方面的问题。很多讨论参数整定方法的文章,都没有明确指出判断参数优劣的准则。我这样的判断方法对吗?望指教、望探讨,非常感谢!



 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享
 即调整过程中,超调部分的变化趋势是称对数变化的
准:调节稳定后可通过均值和标准差来进行衡量,特别是标准差,反映了后续调节的稳定性
快:这个就很简单了,一看调节次数,而看调节总时间
即调整过程中,超调部分的变化趋势是称对数变化的
准:调节稳定后可通过均值和标准差来进行衡量,特别是标准差,反映了后续调节的稳定性
快:这个就很简单了,一看调节次数,而看调节总时间



