27,521
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享uwICValue2=LL_TIM_GetCounter(TIM3);
LCD_ShowIntNum(73, 60,uwICValue2,sizeof(uwICValue2),RED,BLACK, 24);void MX_TIM3_Init(void)
{
/* USER CODE BEGIN TIM3_Init 0 */
/* USER CODE END TIM3_Init 0 */
LL_TIM_InitTypeDef TIM_InitStruct = {0};
LL_GPIO_InitTypeDef GPIO_InitStruct = {0};
/* Peripheral clock enable */
LL_APB1_GRP1_EnableClock(LL_APB1_GRP1_PERIPH_TIM3);
LL_APB2_GRP1_EnableClock(LL_APB2_GRP1_PERIPH_GPIOA);
/**TIM3 GPIO Configuration
PA6 ------> TIM3_CH1
PA7 ------> TIM3_CH2
*/
GPIO_InitStruct.Pin = LL_GPIO_PIN_6|LL_GPIO_PIN_7;
GPIO_InitStruct.Mode = LL_GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = LL_GPIO_PULL_UP;
LL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USER CODE BEGIN TIM3_Init 1 */
/* USER CODE END TIM3_Init 1 */
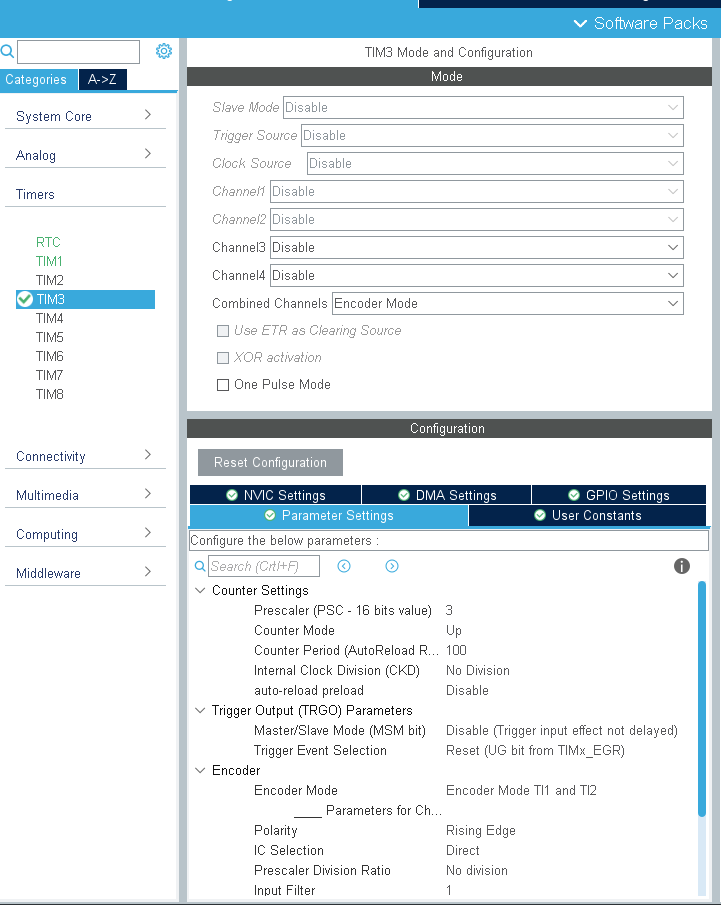
LL_TIM_SetEncoderMode(TIM3, LL_TIM_ENCODERMODE_X4_TI12);
LL_TIM_IC_SetActiveInput(TIM3, LL_TIM_CHANNEL_CH1, LL_TIM_ACTIVEINPUT_DIRECTTI);
LL_TIM_IC_SetPrescaler(TIM3, LL_TIM_CHANNEL_CH1, LL_TIM_ICPSC_DIV1);
LL_TIM_IC_SetFilter(TIM3, LL_TIM_CHANNEL_CH1, LL_TIM_IC_FILTER_FDIV1_N2);
LL_TIM_IC_SetPolarity(TIM3, LL_TIM_CHANNEL_CH1, LL_TIM_IC_POLARITY_RISING);
LL_TIM_IC_SetActiveInput(TIM3, LL_TIM_CHANNEL_CH2, LL_TIM_ACTIVEINPUT_DIRECTTI);
LL_TIM_IC_SetPrescaler(TIM3, LL_TIM_CHANNEL_CH2, LL_TIM_ICPSC_DIV1);
LL_TIM_IC_SetFilter(TIM3, LL_TIM_CHANNEL_CH2, LL_TIM_IC_FILTER_FDIV1_N2);
LL_TIM_IC_SetPolarity(TIM3, LL_TIM_CHANNEL_CH2, LL_TIM_IC_POLARITY_RISING);
TIM_InitStruct.Prescaler = 3;
TIM_InitStruct.CounterMode = LL_TIM_COUNTERMODE_UP;
TIM_InitStruct.Autoreload = 100;
TIM_InitStruct.ClockDivision = LL_TIM_CLOCKDIVISION_DIV1;
LL_TIM_Init(TIM3, &TIM_InitStruct);
LL_TIM_DisableARRPreload(TIM3);
LL_TIM_SetTriggerOutput(TIM3, LL_TIM_TRGO_RESET);
LL_TIM_DisableMasterSlaveMode(TIM3);
/* USER CODE BEGIN TIM3_Init 2 */
/* USER CODE END TIM3_Init 2 */
}