社区
Java
帖子详情
JavaScript
Yggdrasil——
2021-04-02 09:32:11
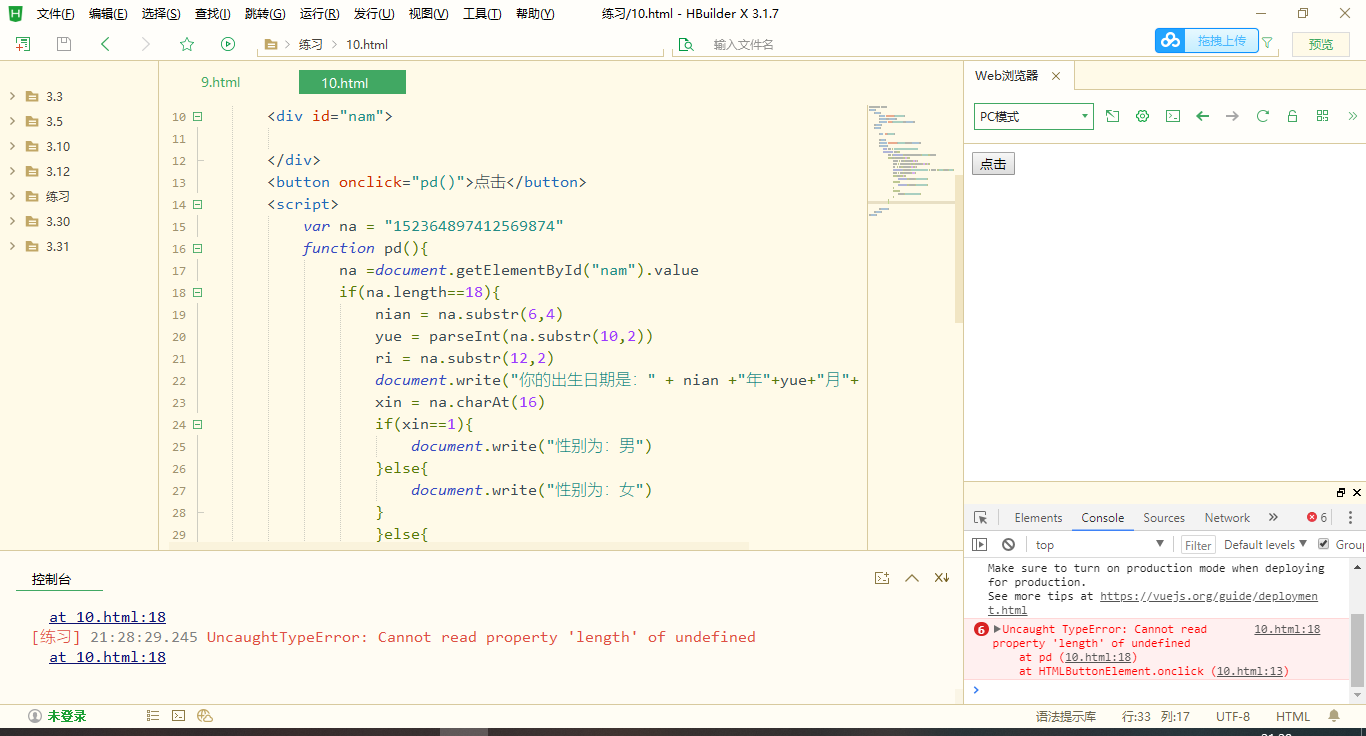
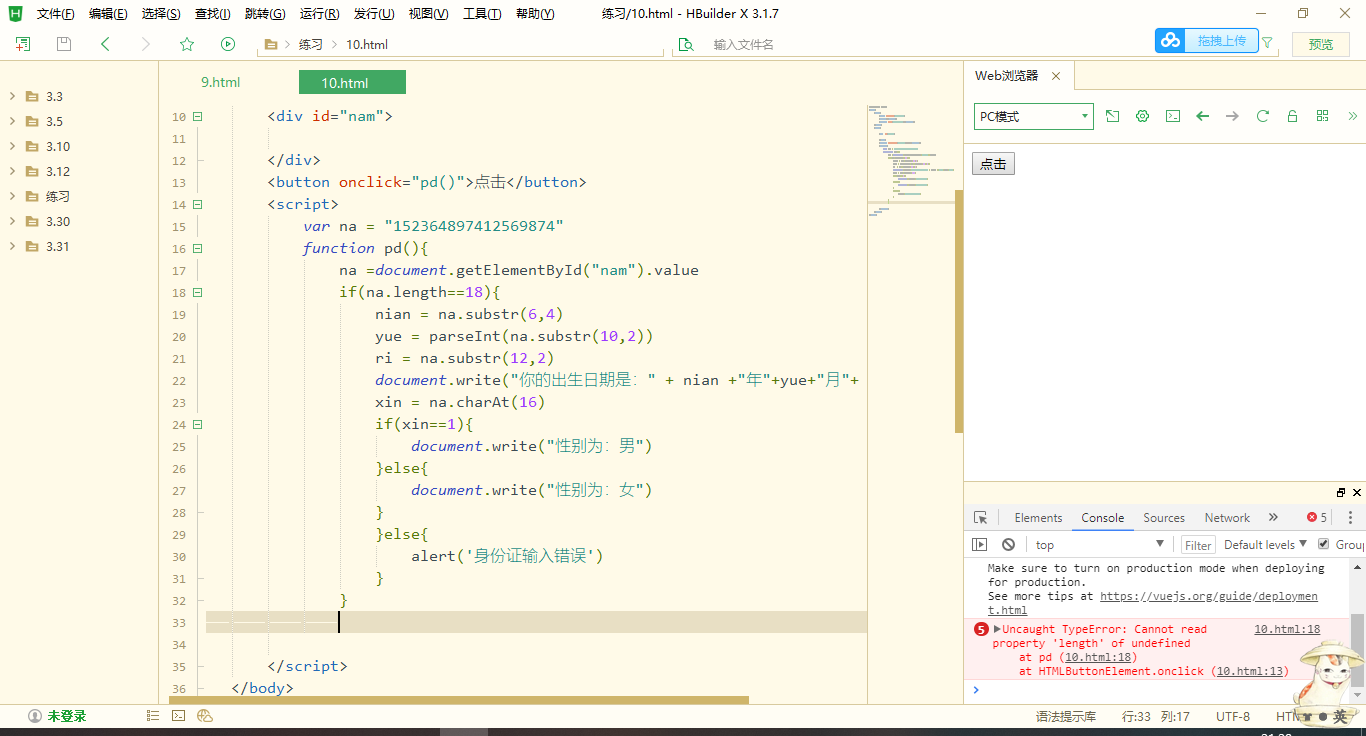
这个是哪里错了?有妹有人说一下,十分感激
...全文
193
2
打赏
收藏
JavaScript
这个是哪里错了?有妹有人说一下,十分感激
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
2 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
Yggdrasil——
2021-04-18
打赏
举报
回复
好!谢谢哥哥!
微小的xx
2021-04-16
打赏
举报
回复
na= 是空值; 后边少了; undefined 控制值异常
深入
JavaScript
之JS引擎如何执行JS代码
本文深入探讨了
JavaScript
中的执行环境、执行上下文、作用域链等核心概念,揭示了JS代码执行背后的机制,帮助理解变量查找、闭包等工作原理。
node.js和
javascript
的关系
本文主要探讨了
JavaScript
和Java的关系,类比了V8与JVM、node.js与JRE。还翻译了Quora上关于
JavaScript
和Node.js区别的回答,指出node.js是运行
JavaScript
的环境。此外,介绍了浏览器端和服务器端
JavaScript
的组成区别,包括ECMAScript、DOM、BOM及node.js内置模块等。
JavaScript
的起源?不同的
JavaScript
和引擎?JS版本发展史?
本文介绍了
JavaScript
的起源,它诞生于1995年,标准为ECMAScript。还提及不同的
JavaScript
变体,如JScript、ActionScript、TypeScript等,以及Node.js这一解释器环境。阐述了多种
JavaScript
引擎,说明了JS内嵌于HTML的执行时机,最后回顾了JS版本的发展历程。
javaScript
-如何引入js代码
本文详细介绍了在HTML中引入
JavaScript
代码的两种主要方式:内嵌代码和引用外部JS文件。通过实例展示了如何使用script标签直接在HTML文档中编写JS代码,以及如何通过src属性链接外部JS文件。
JS讲解(
JavaScript
)
本文围绕
JavaScript
展开,介绍了其简介、引入方式,包含内外部JS的语法与示例。还讲解了JS小功能、调试方法,以及基本语法,如变量、数据类型等。此外,对函数、事件、DOM操作,标签及属性操作等内容进行了详细阐述。
Java
51,408
社区成员
86,094
社区内容
发帖
与我相关
我的任务
Java
Java相关技术讨论
复制链接
扫一扫
分享
社区描述
Java相关技术讨论
java
spring boot
spring cloud
技术论坛(原bbs)
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享




