


11,399
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享问答本周主要更新功能一览,欢 迎体验建议!按照惯例,请将你本周发现的问答Bug或对问答的建议分享到问题在下方(点我去回答),如果有合适的回答,我们将会选取一名用户的回答给予采纳, 送上赏金,好的回答也能获得随机打赏哦!
1、PC端首页支持频道多选
点击PC端问答首页筛选栏,可以选择多个频道,选择后,首页只会出相应频道的内容哦

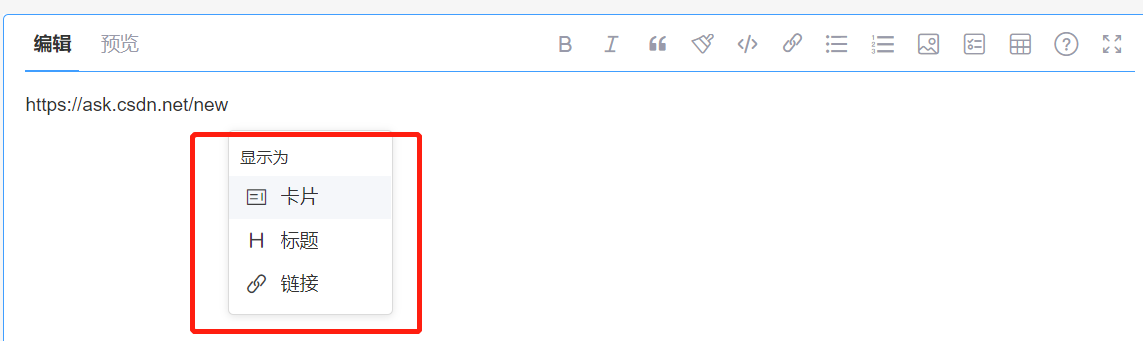
2、编辑器链接识别功能优化
在编辑器输入链接后,可以选择链接的展现形式,不选择则默认为卡片样式
3、服务号助手弹窗频率优化
对于还未关注服务号的用户,弹窗每天仅会提示一次,微信关注服务号吼,你收到的问答消息将在第一时间微信通知给你,没有其他任何打扰或者营销信息哦~

4、期待你的建议反馈
使用过程中你若发现问答的Bug或有对问答的建议,想要添加的功能,请在下方回答,我们会选取一个回答进行采纳!如果别人提出的功能建议,你觉得不错可以给他点个赞哦!人气越高优先级越高~
关于BUG反馈,请按照下方格式反馈:
1、Bug描述:描述Bug发生的场景
2、发生的环境:浏览器版本/电脑版本
3、Bug页面链接:出现Bug页面的链接
4、Bug截图:提供对应的Bug截图
5、其他补充信息
 AI:大模型领域最新算法SOTA核心技术要点总结(一直持续更新)、大模型实战与理论经验总结(训练优化+代码实战+前沿技术探讨+最新案例应用)、带你精细解读多篇优秀的大模型论文、AI领域各种工具产品集合
AI:大模型领域最新算法SOTA核心技术要点总结(一直持续更新)、大模型实战与理论经验总结(训练优化+代码实战+前沿技术探讨+最新案例应用)、带你精细解读多篇优秀的大模型论文、AI领域各种工具产品集合


