183
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享| The Link Your Class | https://bbs.csdn.net/forums/MUEE308FZ |
|---|---|
| The Link of Requirement of This Assignment | EE308_LPL_Sprint (D3)-CSDN社区 |
| Group number | 07-B |
| The leader's MU STU ID and FZU STU ID | 19104448_831901201 |
| The members MU STU ID and FZU STU ID |
19103573_831901223 |
| The members MU STU ID and FZU STU ID | 19103476_831901206 |
| The members MU STU ID and FZU STU ID | 19103077_831901218 |
| The members MU STU ID and FZU STU ID | 19104171_831901301 |
| The Name of Team | LPL |
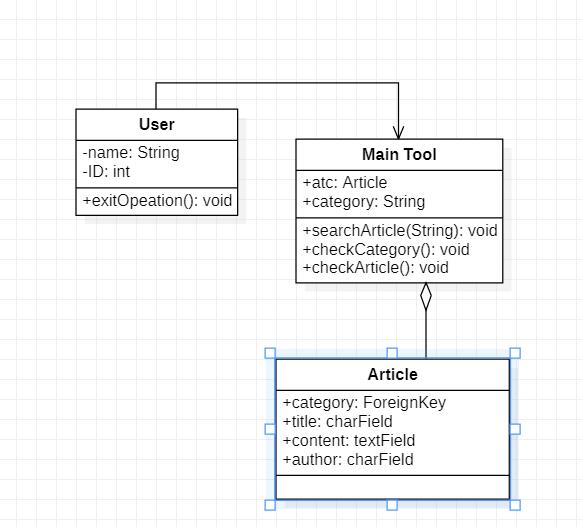
| GITHUB PROJECT LINK | https://github.com/Koumpo101/Programming-language-teaching |
| Member | Completed tasks | Time(min) | Difficulties and Solution |
|---|---|---|---|
| MengZe Yu | Start a meeting, distribute the group work | 55 | Need to collect information online and investigate the market |
|
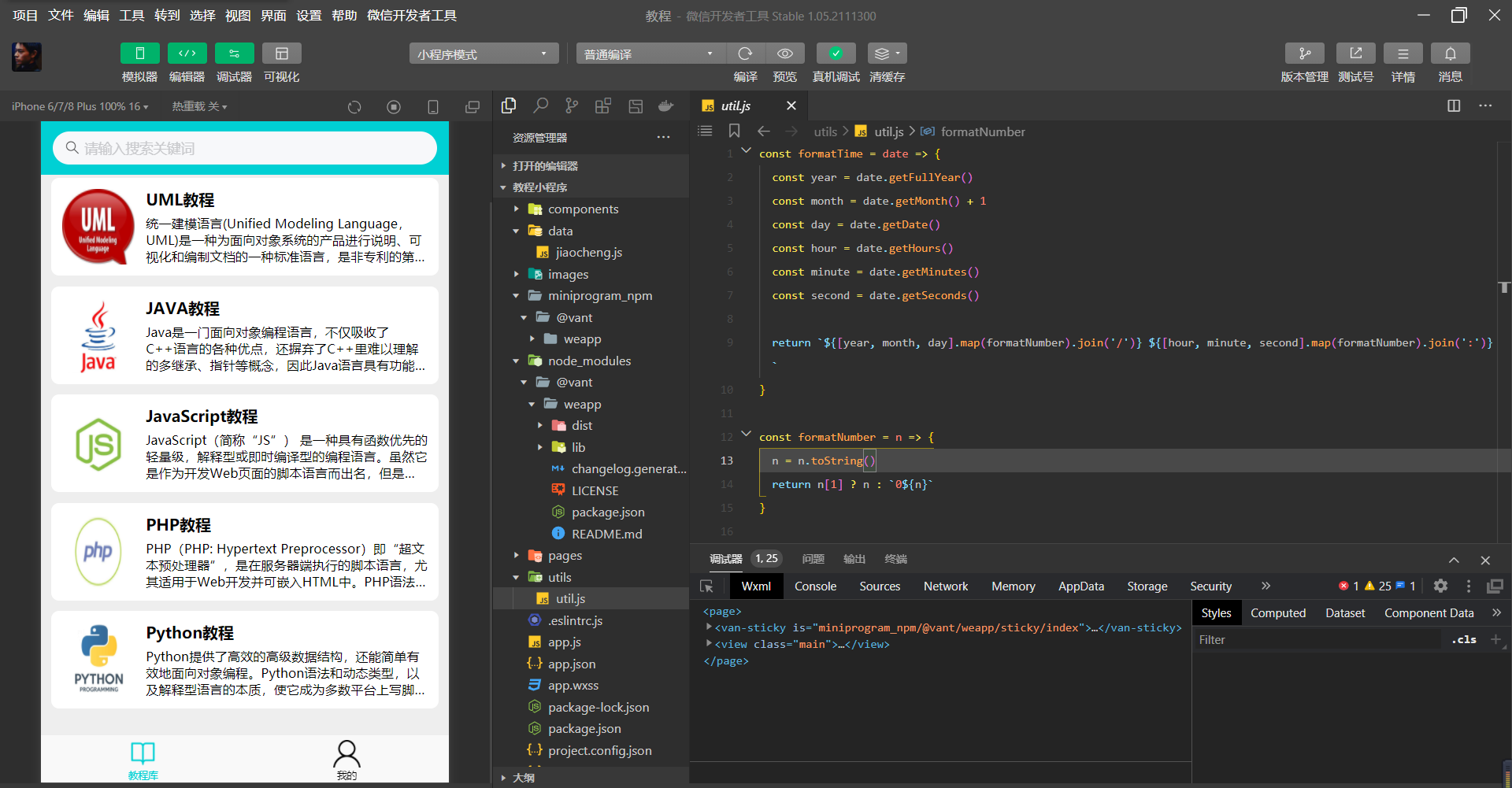
WenQi Chen | Create applet basic framework | 100 | The initial configuration takes a lot of time |
| ZhiLin Jie | Optimization framework code | 80 | |
| SiCai Cao | Integrate GitHub and gitee help documents | 120 | Finding the API of Github and Gitee is very troublesome |
|
GuangRong
Liu | Find some API for our applet | 96 |
| Memeber | Contribution Rate | Contribution Details |
|---|---|---|
| MengZe Yu | 35% | Database implementation stage, Blog writing MengZe Yu |
|
WenQi Chen | 35% | Learning HTML issues,Assist in shooting Vlog
WenQi Chen |
| ZhiLin Jie | 10% | Front-end page design, learning how to make interface |
| SiCai Cao | 10% | Upload codes to Github team repository, assisting in shooting Vlog |
|
GuangRong
Liu | 10% | Shooting daily Vlog, assisting in writing Vlog |
、