


11,417
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享问答近期主要更新功能一览,欢迎体验建议!按照惯例,请将你本周发现的问答Bug或对问答的建议回答到问题在下方(点击去回答),我们将会选取一名用户的回答给予采纳, 送上赏金,好的回答也能获得随机打赏哦!
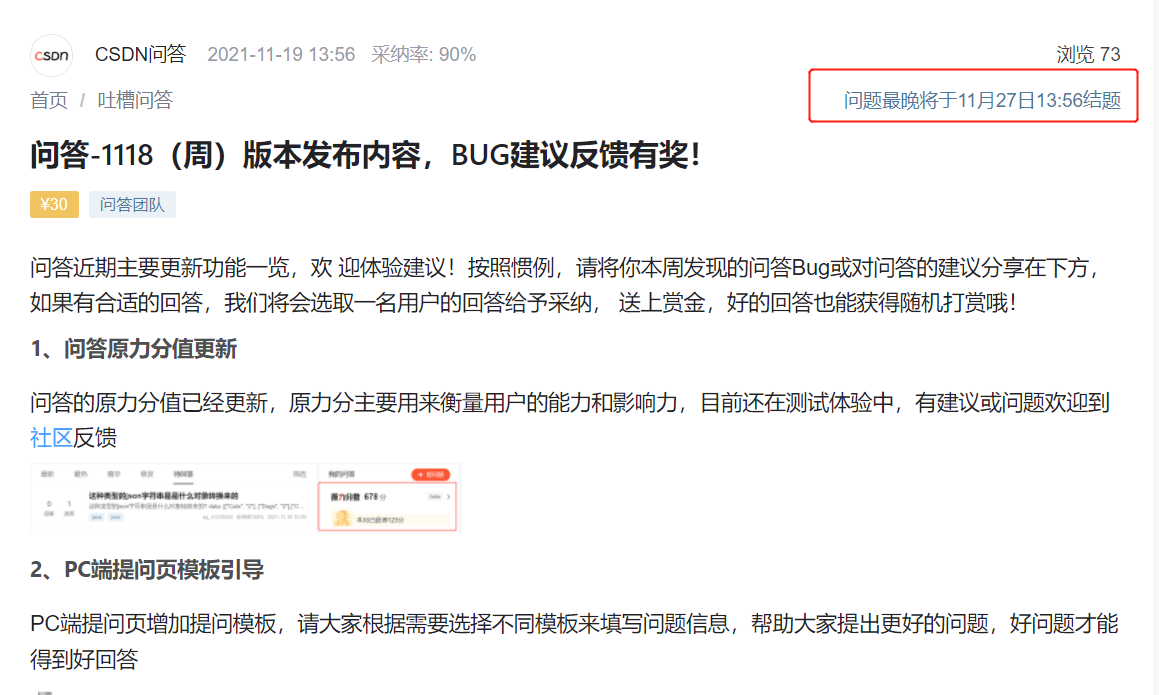
1、待采纳的付费问题增加结题时间提示
付费问题详情页右侧增加结题时间提示,如果提问用户不做任何操作,系统将在该时间自动结题哦
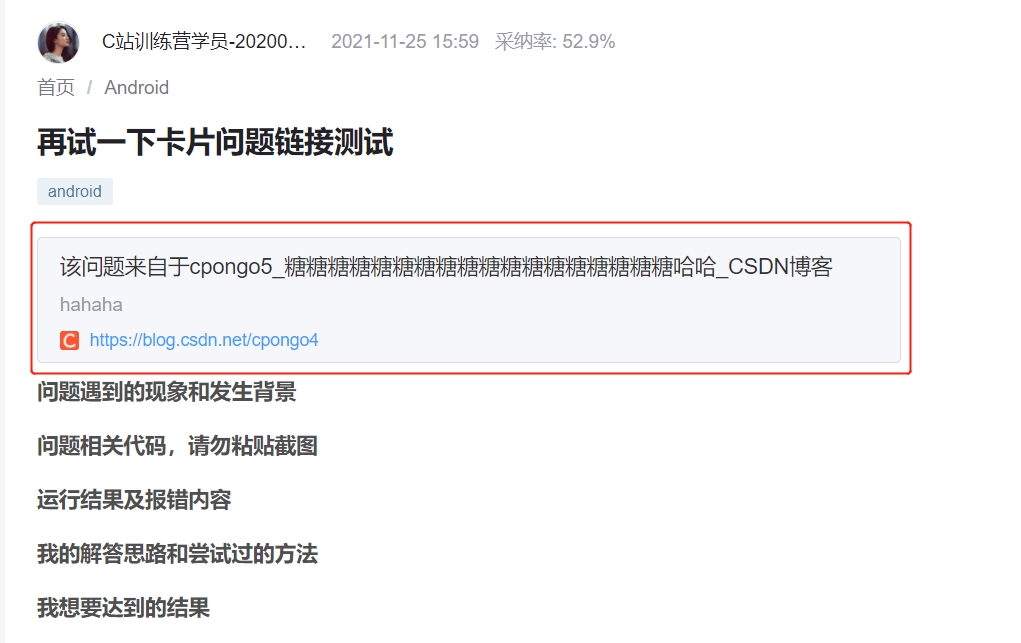
2、向他人提问带上被提问用户信息
向他人发出的邀请提问,问题详情页会带上被提问者的个人信息,点击即可查看被提问者的个人主页
3、问答首页右侧增加社区公告入口
点击问答右侧的"问答公告"即可直达问答社区,有关问答的活动、奖惩名单都会在这里公布

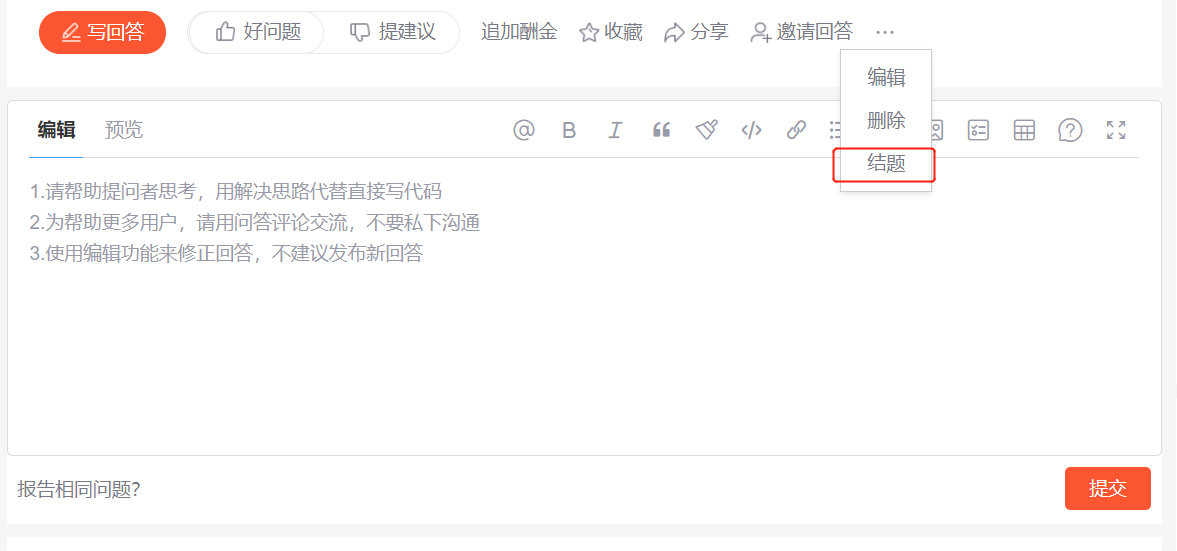
4、免费问题支持结题
免费问题如果不存在有效回答,用户也可以主动结题啦,结题后问题将不能接收新的回答了,小心操作哦
5、问答举报弹窗更换
问答更新了举报弹窗,针对抄袭作弊类举报,可以输入被抄袭的链接哦

6、期待你的建议反馈
还有一些细节优化,等待大家使用过程中发现。使用过程中你若发现问答的Bug或有对问答的建议,想要添加的功能,请在下方回答,我们会选取一个回答进行采纳!如果别人提出的功能建议,你觉得不错可以给他点个赞哦!人气越高优先级越高
关于BUG反馈,请按照下方格式反馈:
1、Bug描述:描述Bug发生的场景
2、发生的环境:浏览器版本/电脑版本
3、Bug页面链接:出现Bug页面的链接
4、Bug截图:提供对应的Bug截图
5、其他补充信息



