12
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享AJ-Report按功能区划分为:
1、权限模块
admin用户拥有最高权限。
权限管理,通过权限树看到当前系统的所有权限,以及对应的字典项。

角色管理查看当前系统已有角色,可以对角色进行权限的新增修改
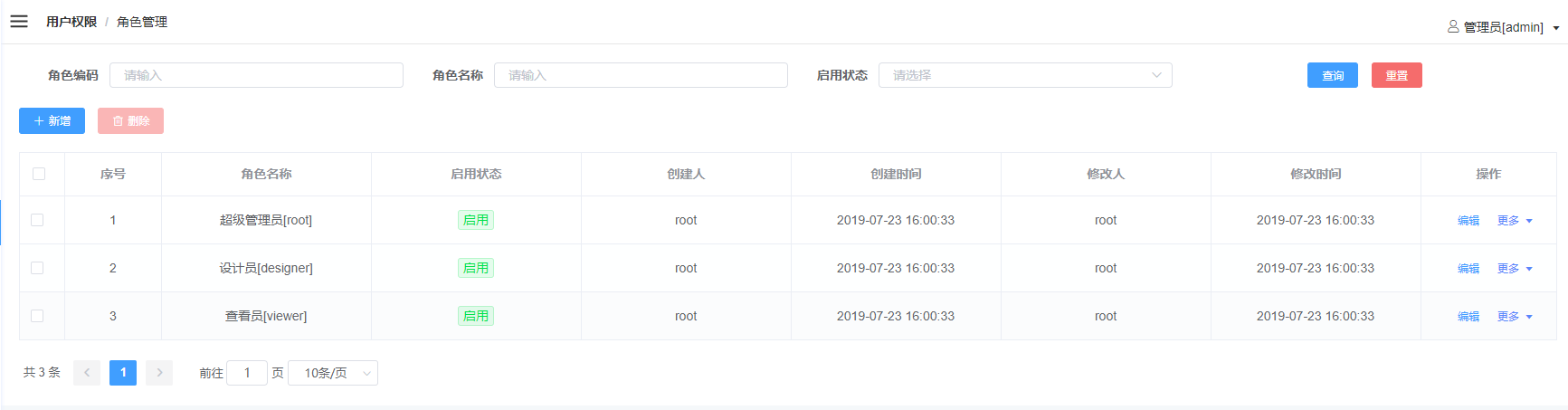
用户管理
用户授权只需要赋予对应角色,当角色的权限改变时,该角色下的用户权限也随之更改。
2、报表模块
数据源、添加数据源,数据的源头。

数据集,分为sql数据集、http数据集,配置了数据源可以直接写sql完成数据集的创建,只能通过接口获得数据,则使用http数据集,支持https

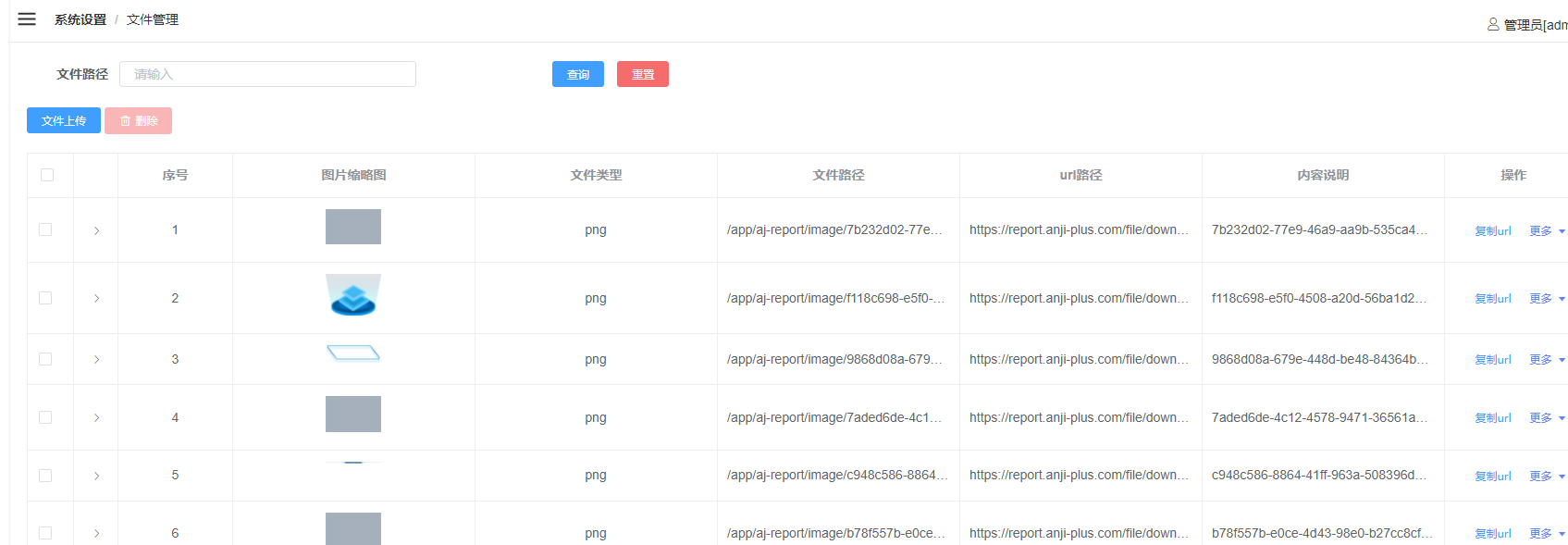
3、系统设置
文件管理,上传下载的文件都会在此,通过execl导出的文件也会在这里下载。