



2,316
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享
操作路径:
功能配置——信息管理——加入限制——选择限制加入——点击 复制链接或下载二维码 分享给学生——学生在链接或二维码有效期内点击加入社区即可

注:加入社区需要拥有一个 CSDN 账号,如果学生没有 CSDN 账号,可以让学生 点击这里,注册 CSDN 账号
让学生完善社区信息,是为了帮助老师们能更快地识别社区中每个 CSDN 账户背后对应的是哪个学生,以便更有效地沟通。
就像修改群昵称一样,请学生们把社区昵称改为真实姓名,社区签名改为【班级-学号】的格式,修改位置见下图:

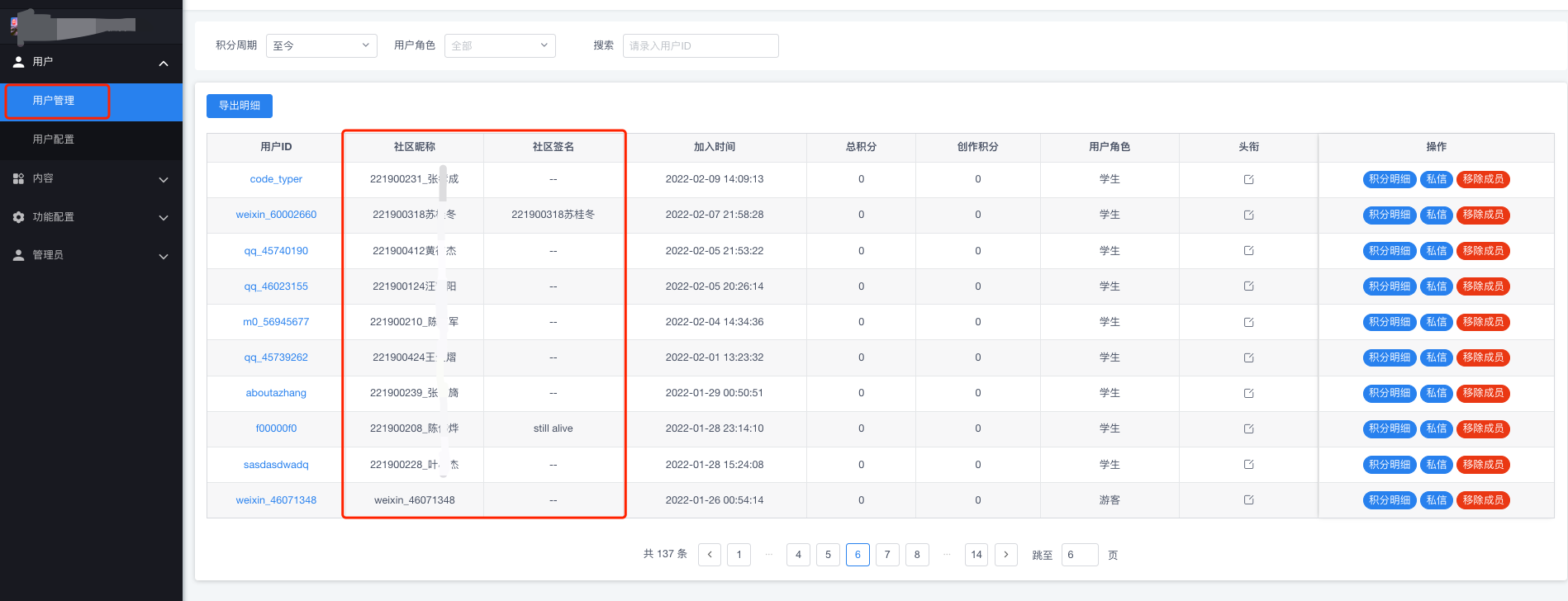
这些信息会在社区内显示,老师和社区管理员还可以通过后台查看明细,见下图
⬇️ 前台展示

⬇️ 后台展示
如果,您想要学生在社区内呈现出本校的信息和认证,您可以让学生完成 CSDN 的教育认证


