社区
CPU和硬件区
帖子详情
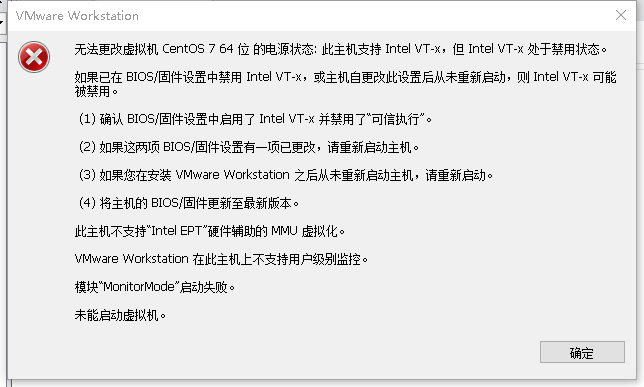
无法更改虚拟机 CentOS 7 64 位 的电源状态: 此主机支持 Intel VT-x,但 Intel VT-x 处于禁用状态。
m0_64492809
2022-03-22 14:24:08
求大神帮我看一下我的intel CORE i5的bios在哪打开??
...全文
1141
1
打赏
收藏
无法更改虚拟机 CentOS 7 64 位 的电源状态: 此主机支持 Intel VT-x,但 Intel VT-x 处于禁用状态。
求大神帮我看一下我的intel CORE i5的bios在哪打开??
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
1 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
CSDN-Ada助手
2023-01-13
打赏
举报
回复
您可以前往
CSDN问答-运维
发布问题, 以便更快地解决您的疑问
VMware提示此
主机
支持
Intel
VT
-x,但
Intel
VT
-x
处于
禁用
状态
,此
主机
不
支持
“
Intel
EPT”硬件辅助的 MMU 虚拟化。模块“CPUIDEarly”启动失败解决方法
本文详细介绍了在使用VMware运行
CentOS
虚拟机
时遇到
Intel
VT
-x被
禁用
的问题及解决步骤。通过修改BIOS设置启用
Intel
VT
-x,并提供了具体操作流程,最终使
虚拟机
恢复正常运行。
此
主机
支持
Intel
VT
-x,但
Intel
VT
-x
处于
禁用
状态
问题解决4/4
本文指导如何在Windows系统更新后,面对'此
主机
支持
Intel
VT
-x,但
Intel
VT
-x
处于
禁用
状态
'的问题,通过进入BIOS设置开启
Intel
VirtualizationTechnology来修复
CentOS
虚拟机
。详细步骤包括进入BIOS的方法和找到相关选项的过程。
启动
虚拟机
异常(完整版)——如果已在 BIOS/固件设置中
禁用
Intel
VT
-x,或
主机
自
更改
此设置后从未重新启动,则
Intel
VT
-x
处于
禁用
状态
本文详细介绍了在不同品牌电脑上进入BIOS设置
Intel
Virtual Technology的方法,以解决VMware
虚拟机
无法
执行
64
位
操作的问题。适用于联想、华硕等品牌的笔记本电脑和台式电脑。
虚拟机
vmware安装系统问题“此
主机
支持
Intel
VT
-x,但
Intel
VT
-x
处于
禁用
状态
”的问题
在使用VMware Workstation尝试安装
CentOS
8时遇到提示:
主机
支持
Intel
VT
-x但其
处于
禁用
状态
。解决方法是进入BIOS设置,启用
Intel
Virtualization Technology,然后保存设置并重启
主机
。
vmware安装
虚拟机
提示:此
主机
支持
Intel
VT
-x,但
Intel
VT
-x
处于
禁用
状态
。
本文详细介绍了在HP台式电脑上,针对Win10操作系统下
Intel
VT
-x功能
禁用
的问题,提供了一套完整的解决方案。从重启电脑进入BIOS到正确启用
Intel
VT
-x,再到重启计算机并成功启动
虚拟机
,每一步都进行了详尽的操作指导。
CPU和硬件区
1,025
社区成员
561
社区内容
发帖
与我相关
我的任务
CPU和硬件区
Linux /Unix kernel支持不同的硬件体系,X86, ARM, MIPS, 等等
复制链接
扫一扫
分享
社区描述
Linux /Unix kernel支持不同的硬件体系,X86, ARM, MIPS, 等等
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章



 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享