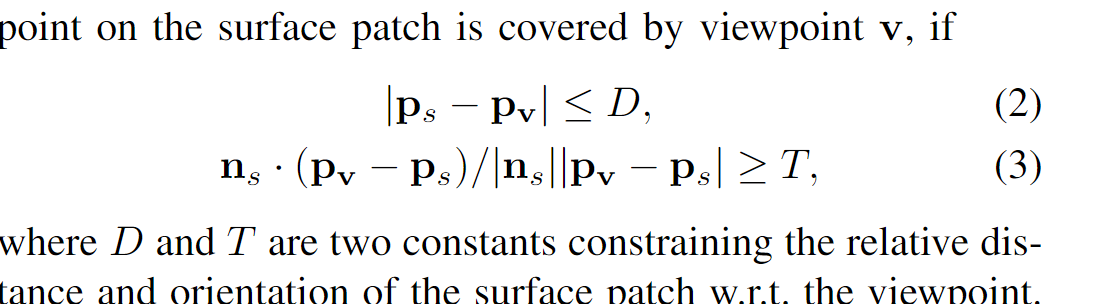
大佬们好,我想问一下判断surface的距离约束和角度约束的参数是在哪设置的呀?
你好,参数kSensorRange对应的是D。在开源的代码中我们省去了对角度的约束,因为在实验当中约束角度带来的效果并不明显。
958
社区成员
401
社区内容
加载中
试试用AI创作助手写篇文章吧





 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享
