


949
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享首先非常感谢大佬们提供的开源平台!!!
最近在跑真实实验,启动我的小车,让小车与计算机保持通信(小车在订阅cmd_vel话题,用自己键盘发布该话题,小车可以移动,测试通信连接成功)
然后启动system_real_robot.launch文件,然后在该终端报以下错误,请问大佬们这是什么原因,又该如何解决呢?
(测试在rviz中选择一个way_point,小车并没有移动)
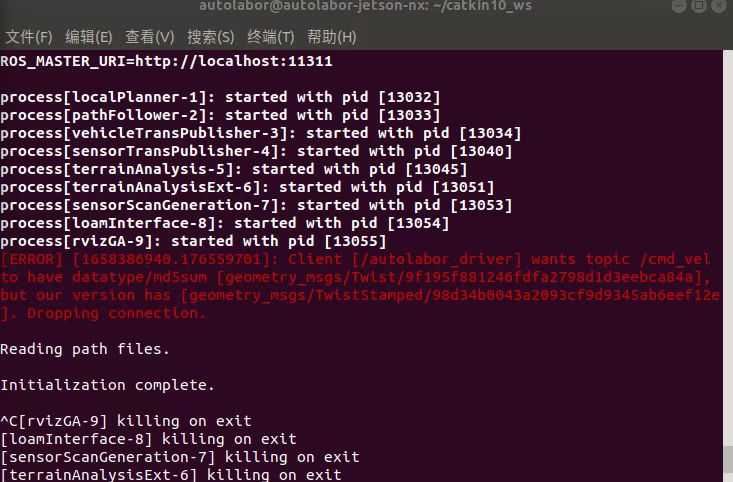

@Jabber_Jagger 回答的是对的,我们提供的系统最终发布的是geometry_msgs/TwistStamped类型,但是你的代码需要的cmd_vel是geometry_msgs/Twist类型,只需要将你代码中接收的消息类型改成TwistStamped就可以了。

错误中写了,话题类型不对,需要geometry_msgs/Twist的类型,但是运行发布的是geometry_msgs/TwistStamped类型
