

949
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享将算法部署到实车,在local_plan部分,我第一次点击way_point后,车能够顺利到达目标点,但是第二次再次点击way_point,车就没有反应。同时关于far_planner部分,在设定目标点后同样也是没有反应,请问这是为什么呢,应该修改哪部分的参数,可以给点建议吗?

之前问题应该在于我使用的底盘是阿克曼底盘,所以会出现小车在原地不动,/cmd_vel只有角速度。我按照以往的帖子修改了dirThre dirToVehicle和dirDiffThre,现在local_plan中小车能够实现避障,但是会出现碰到障碍物或者墙体的情况,请问这是什么原因呢,我将dirDiffThre直接改为1.5是否有影响。同时在使用far_planner时,会出现小车仅能到达局部地图中的一个way_point,然后/cmd_vel输出为0,同时看不到freepath,请问这是为什么呢
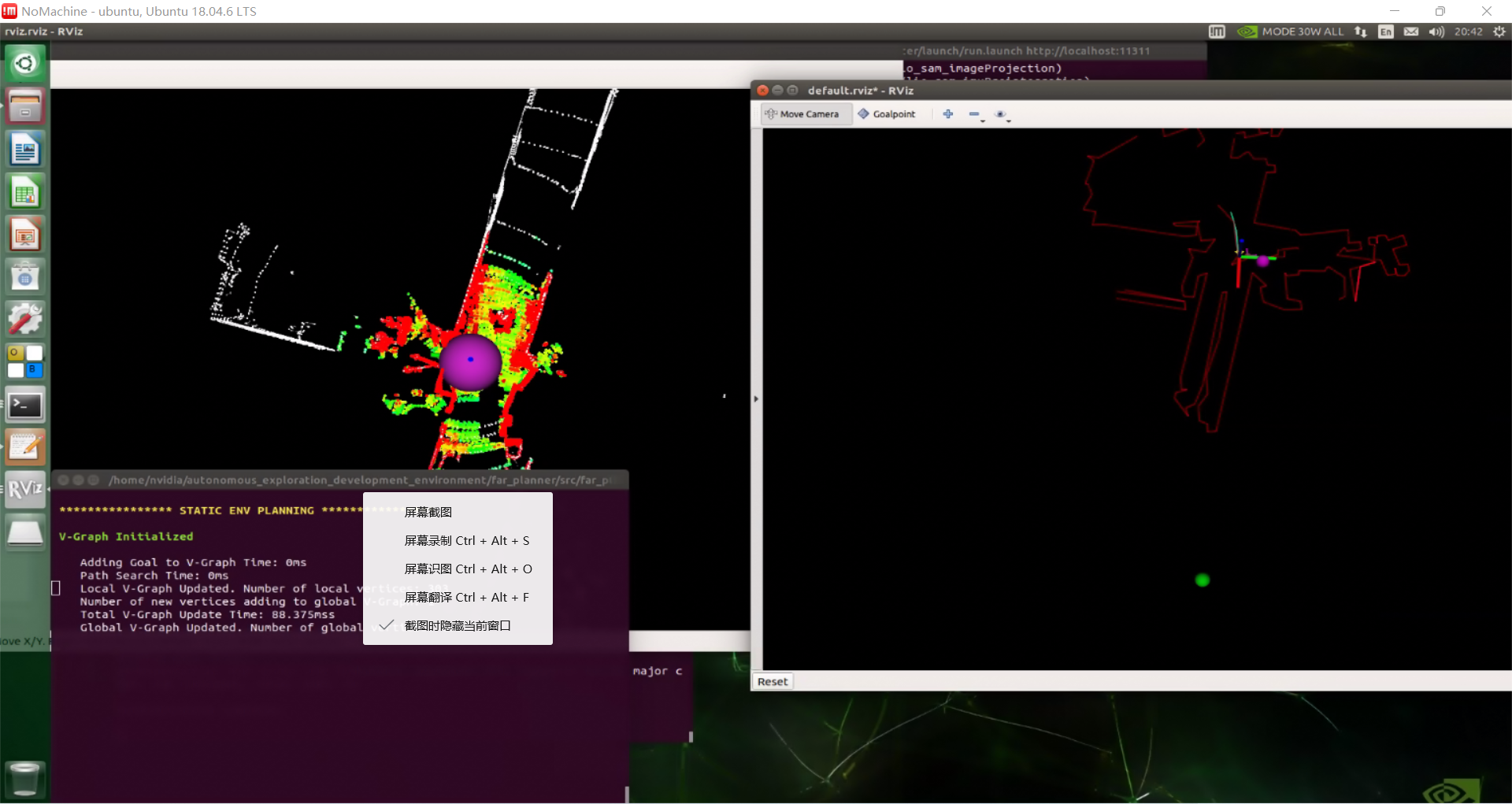

你好,这不一定是设置的问题。可能的原因有两个,第一个是周围的terrain_map是否检测正确,如果terrain_map出错,就会导致机器人周围无路可走,只能静止。第二点是否有遥控器信号介入,如果有外接的遥控器信号输入,机器人会自动切换到手动模式,此时就需要使用smart joystick的模式操控机器人。你可以重复上述两组实验,在rviz里同时显示terrain_map以及far_planner建立的visibility_graph,截图上传,我们才能判断出具体的原因。

cy
