社区
单片机/工控
帖子详情
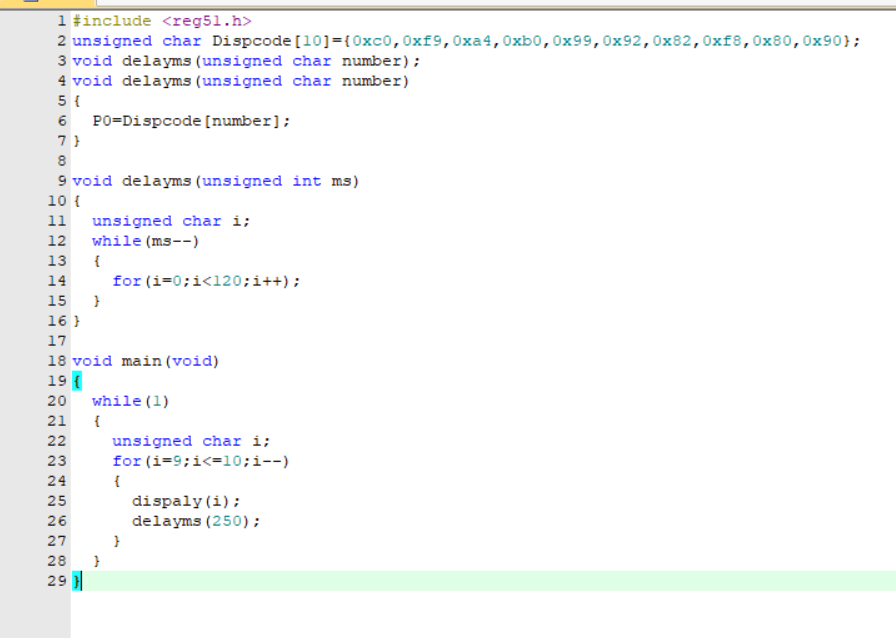
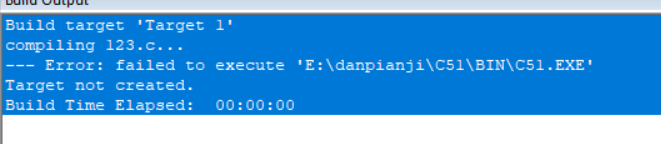
新人求助!这个要怎么处理
weixin_54215954
2022-10-26 20:22:49
...全文
208
2
打赏
收藏
新人求助!这个要怎么处理
[图片]
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
2 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
不忘初心2022
2023-01-31
打赏
举报
回复
为何要定义两个名称一样的延时函数?不理解
qq_53570208
2022-11-03
打赏
举报
回复
定义太多次了
EV2400-Support-Components-20110524.exe
下载代码方式:https://pan.quark.cn/s/ddb1b09a40f6 EV2400_Support_Components_20110524; 在EV2300设备完成驱动程序安装之后,应继续安装相关的支持性软件包;
awdubaowudboauwbdoauwd
awdubaowudboauwbdoauwd
基于python互联网数据分析作业.zip
数据分析可视化实战项目
【2025最新高维多目标优化】基于城市场景下无人机三维路径规划的导航变量的多目标粒子群优化算法NMOPSO研究(Matlab代码实现)
内容概要:本文围绕城市场景下无人机三维路径规划中的导航变量多目标优化问题,提出了一种改进的多目标粒子群优化算法(NMOPSO),旨在应对高维、多约束条件下路径规划的复杂性。研究在Matlab平台上实现了算法仿真,通过构建精细化的城市三维环境模型,综合考虑路径长度、飞行安全性、能耗等多个优化目标,有效提升了无人机在复杂城市环境中执行任务时的路径规划效率与可靠性。文中系统阐述了NMOPSO算法的设计原理、实现流程及关键参数配置,并通过大量对比实验验证了该算法在收敛速度、解集多样性和Pareto前沿质量方面相较于传统多目标优化算法的显著优势; 适合人群:具备一定优化算法理论基础和Matlab编程能力的研究生、科研人员及从事无人机路径规划、智能优化算法研发的工程技术人员; 使用场景及目标:①应用于城市环境下的无人机物流配送、电力巡检、应急救援等实际任务中的高效路径规划;②为高维多目标优化问题的研究与先进智能算法的改进提供高质量的参考案例,推动智能优化技术在无人系统自主决策领域的深入应用; 阅读建议:建议读者结合提供的Matlab代码进行动手实践,重点研读目标函数的数学建模、环境约束的
处理
机制以及算法性能评价指标的设计,以深入理解NMOPSO算法的核心创新点与工程实现细节。
汉字与字母标调拼式转写工具20260706修订版
汉字与拼音转写工具,把汉字转写为字母标调的汉语拼音
单片机/工控
27,521
社区成员
28,798
社区内容
发帖
与我相关
我的任务
单片机/工控
硬件/嵌入开发 单片机/工控
复制链接
扫一扫
分享
社区描述
硬件/嵌入开发 单片机/工控
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享

