


958
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享您好,我在使用自己的模型进行gazebo仿真的时候,他规划出来的速度和角速度一直波动,直线运动的时候速度也是一会大一会小,下面是截图:
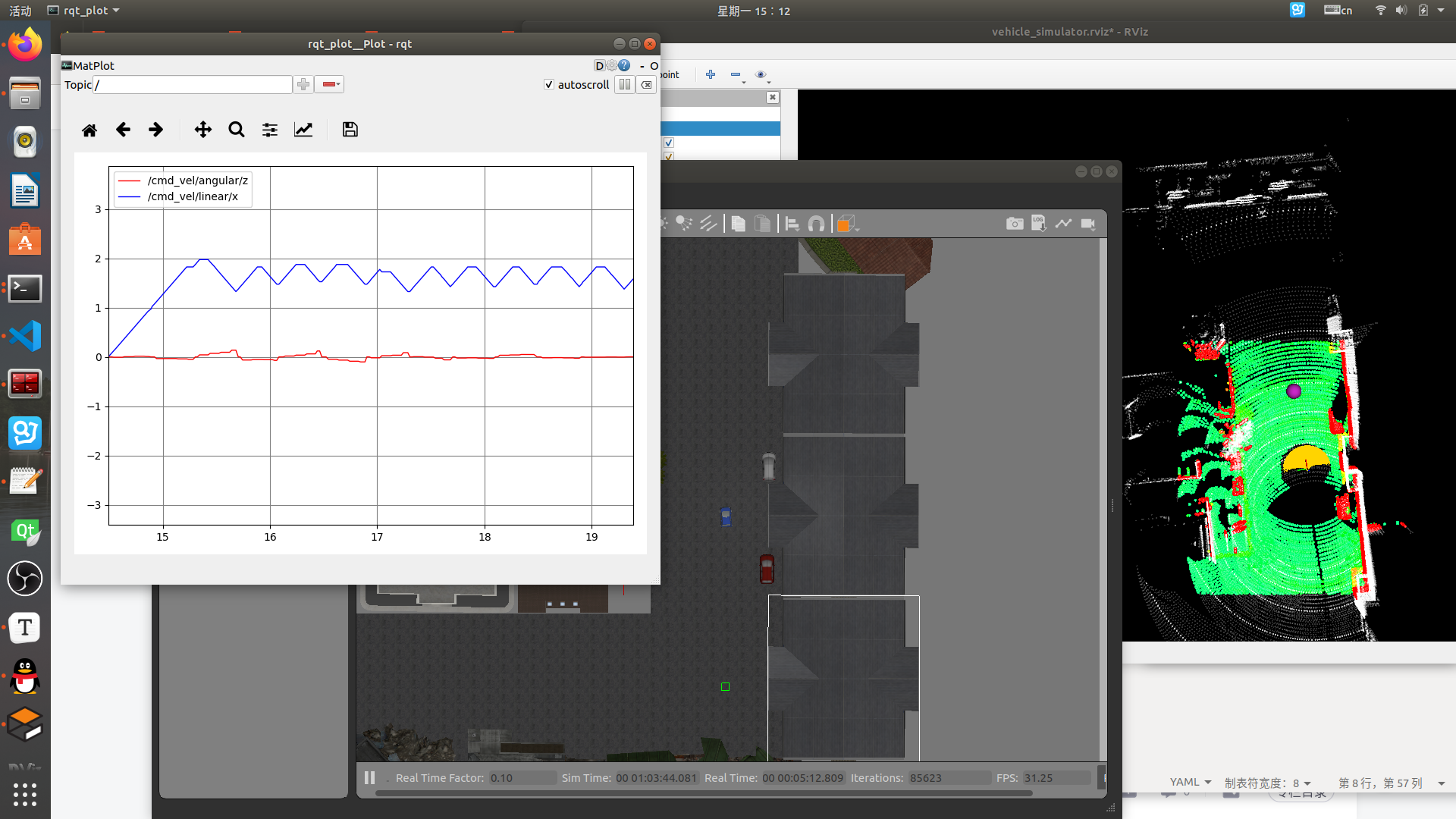
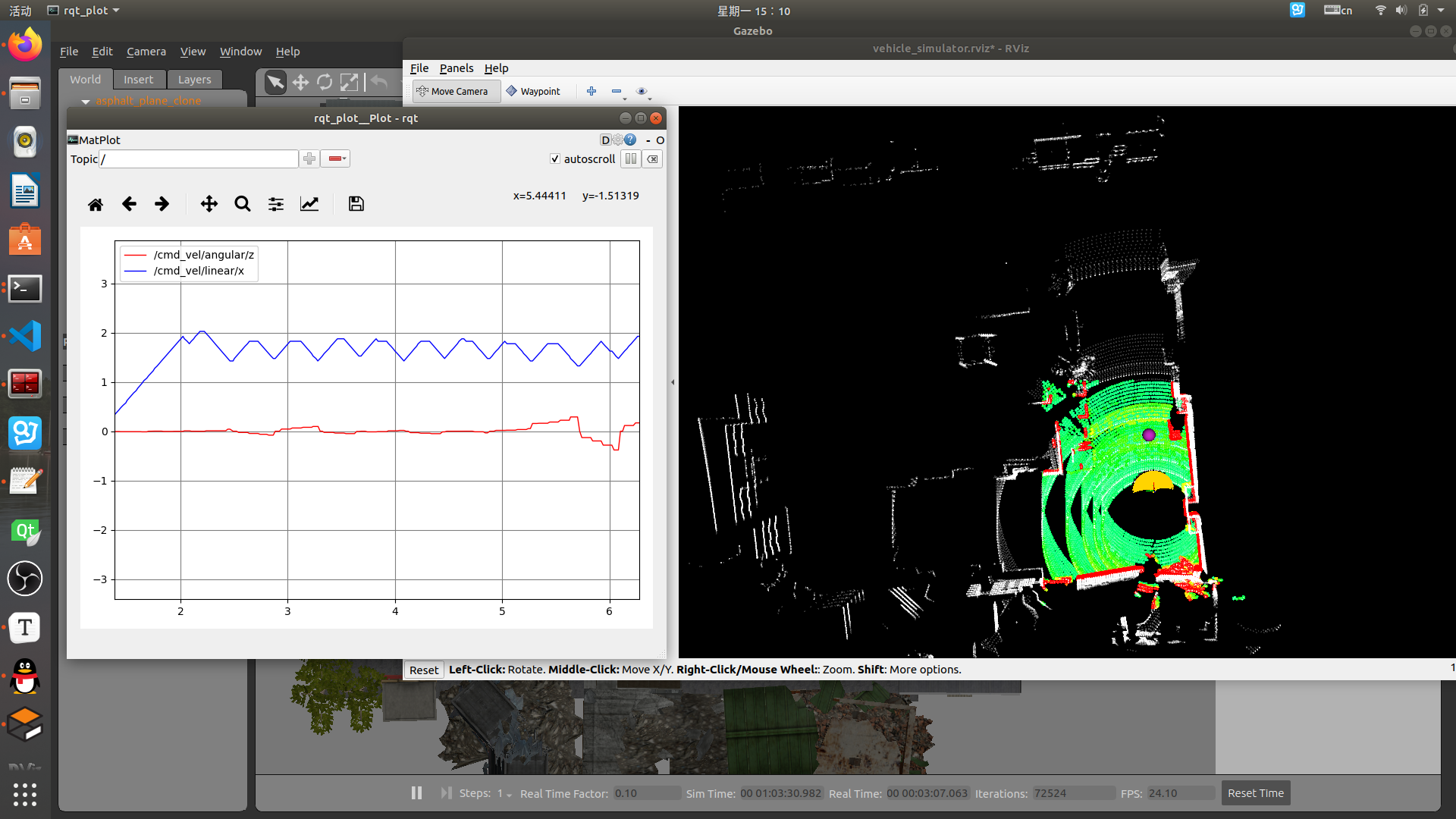
如果是跑自带的仿真环境system_garage就不会出现上面的情况;不知道这是什么原因?
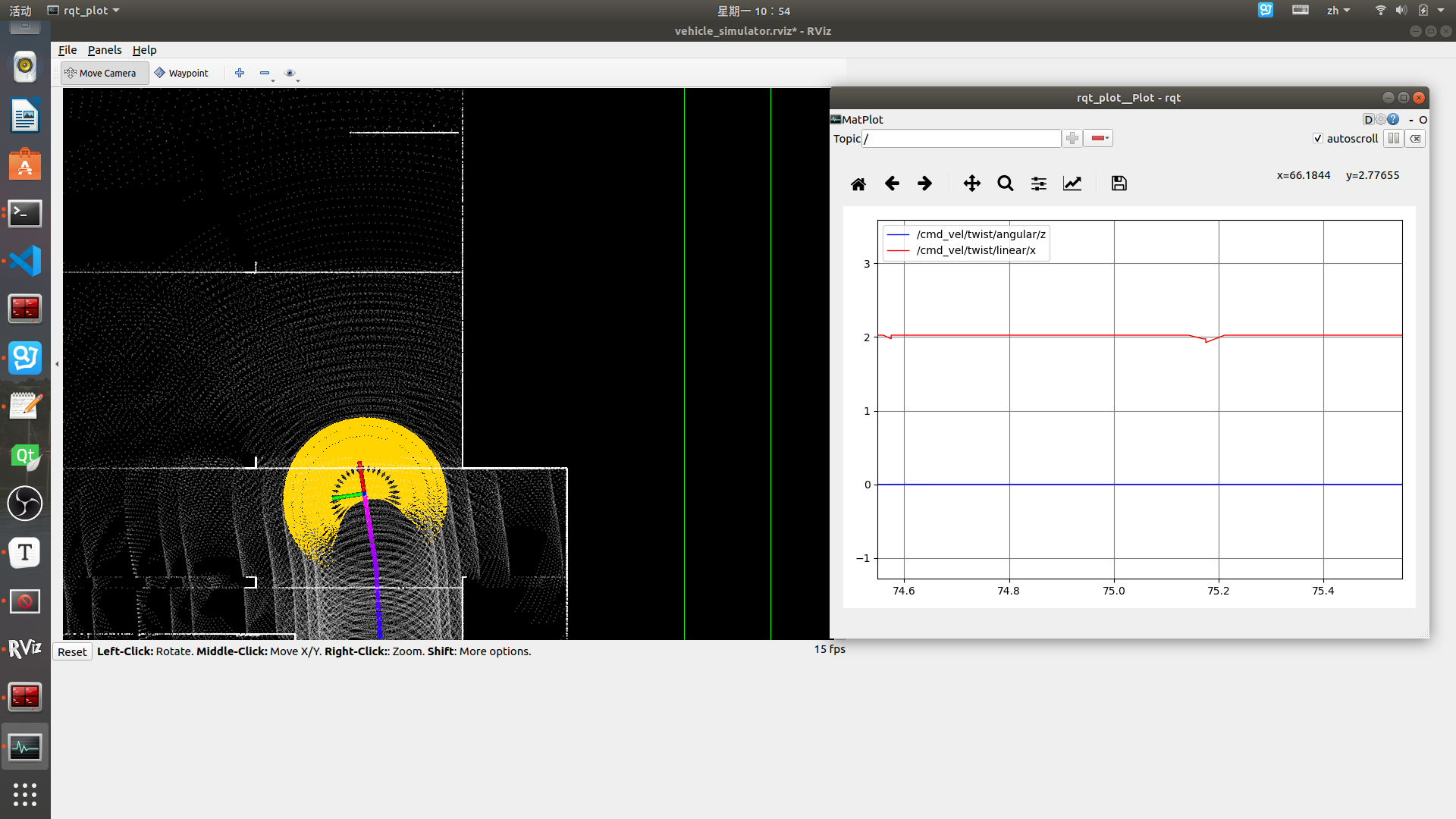

你好,你可以查看一下在你自己的环境里启动之后传感器距离地面的高度是不是符合预期,机器人的初始位置包括高度根据环境不一样有可能会有区别。然后你可以使用smart joystick模式,试试机器人能不能稳定行驶,再disable collision check之后看看机器人的行驶状态。根据你提供的信息,我们很难判断具体的问题,不过可以按照上面的几种方法,查看一下可能的问题。希望能够帮助到你
