


1,269
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享AIGC最近火得一塌糊涂!
12月16日,Science发布2022年度科学十大突破,其中AIGC作为人工智能领域的重要突破也赫然在列。
作为2022年以来AI圈最大的趋势,AIGC意味着,AI进军到了此前被视为“人类独占”的领域,如艺术表达、科学发现。
最初AI这种渗透是缓慢的,但在2022年下半年逐渐形成了一场抢地战,2022年也因此被称作AIGC元年!
AIGC比较流行的在CV和NLP两个方面,让AI拥有了生成图片、文字、代码、音乐、视频的能力。
2021,OpenaAI团队开源了其深度学习模型CLIP;2022年7月,出现了去躁扩散模型Diffusion。两者相互结合,让AI自动生成文字和图片的质量得到了质的提升。
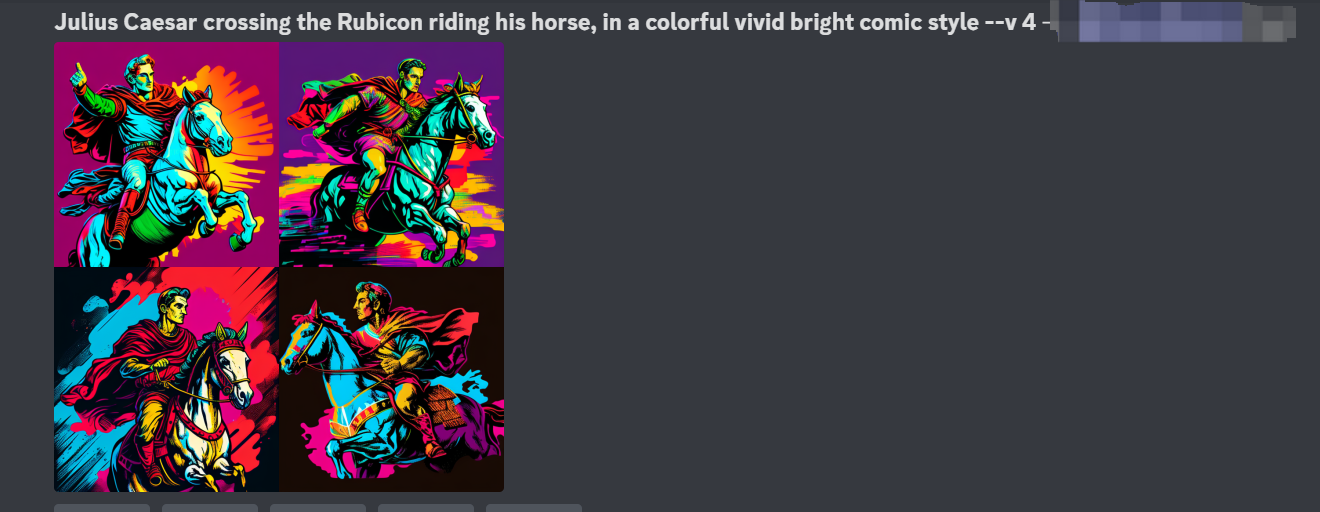
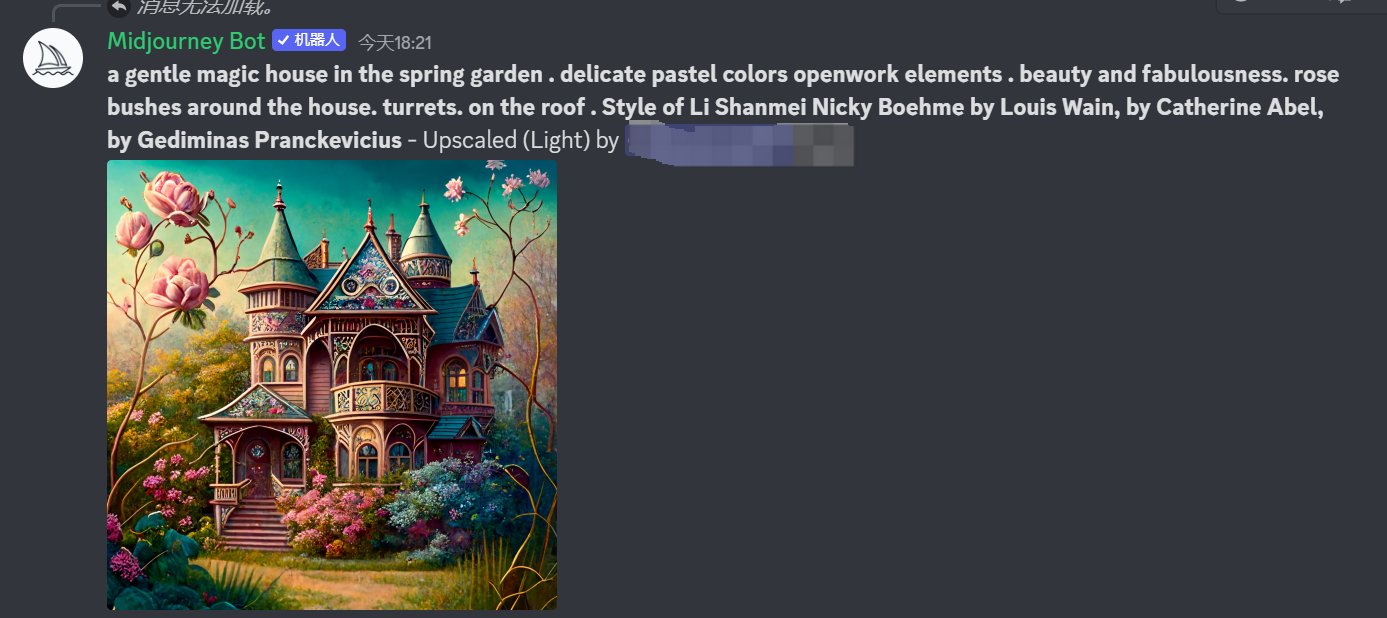
midjourney已经能绘出令人不可思议的图片,普通人看了上瘾,越玩越想玩!
而chatGPT的魔力更是让它迅速出圈,引得无数普通用户为之叹服!
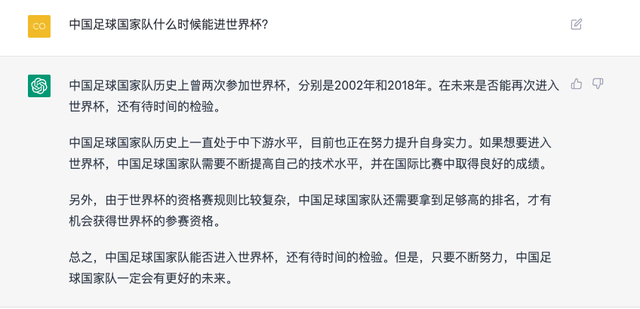
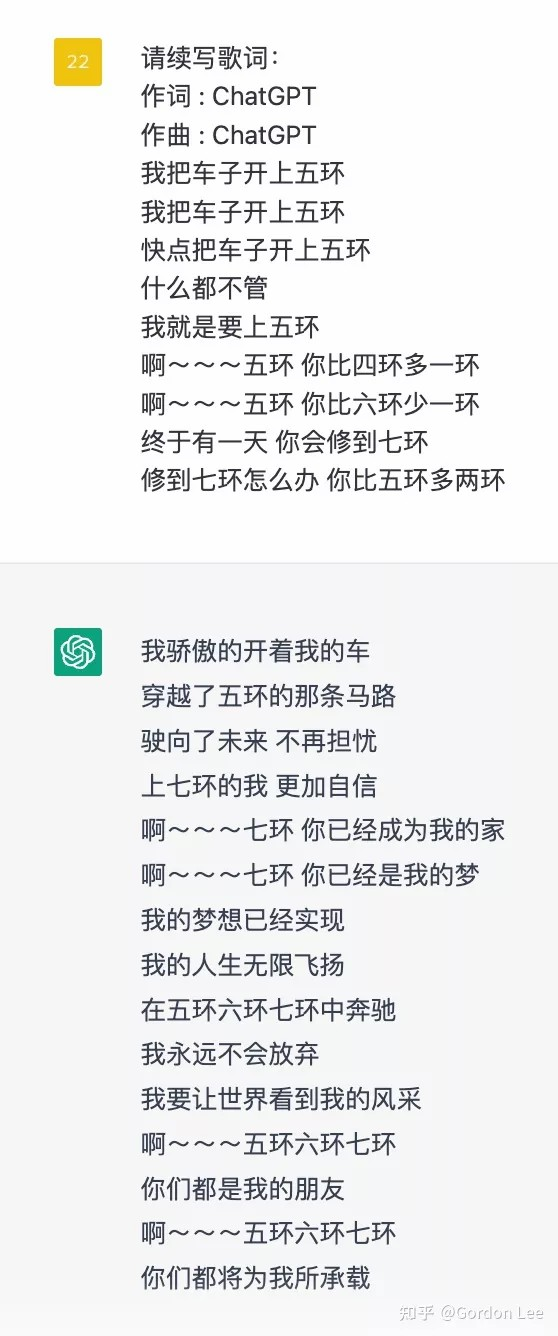
(图片来自知乎网友,侵删)
熟悉的玩家,相信已经对CLIP、Stable Diffusion、DALL-E2、GPT3等模型并不陌生。但这些模型主要基于英语训练,尽管也支持中文输入,但对中文的适配并不是很好。
现在我为大家推荐一组,能更好的地适配中文语料的aigc模型。这套模型是昆仑万维集团旗下的奇点智源公司开发的,它们在12月中旬开源,半个月的时间已经吸引了将近1000名使用者。
这里是地址——
GitHub地址:
账户主页:https://github.com/SkyWorkAIGC
SkyPaint(AI绘画):https://github.com/SkyWorkAIGC/SkyPaint-AI-Diffusion
SkyCode(AI生成代码):https://github.com/SkyWorkAIGC/SkyCode-AI-CodeX-GPT3
SkyText(AI生成文本):https://github.com/SkyWorkAIGC/SkyText-CN-GPT3
SkyChat(AI聊天):https://github.com/SkyWorkAIGC/SkyChat-CN-Chatbot-GPT3
Hugging Face模型地址:
账户主页:https://huggingface.co/SkyWork
SkyPaint(AI绘画):https://huggingface.co/SkyWork/SkyPaint
SkyCode(AI生成代码):https://huggingface.co/SkyWork/SkyCode
SkyText(AI生成文本):https://huggingface.co/SkyWork/SkyText
SkyTextTiny:https://huggingface.co/SkyWork/SkyTextTiny
如果你对AIGC感兴趣,想要打造自己的AIGC项目,不妨基于这套开源模型展开开发,也许能收获惊喜!



