1,408
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享本节介绍相机、网格/矩阵/图像和机器人坐标系。
ISAAC教程合集地址: https://blog.csdn.net/kunhe0512/category_12163211.html
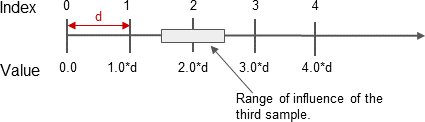
存储网格 $G$ 上的值,使得网格单元将值存储在坐标 $i×d$ 处,其中 $d$ 是样本点之间的间距。 这意味着 $G[i]=f(id)$。 如果 $y=f(x)$ 应以“nearest”插值模式检索,则 x 被四舍五入到最近的索引 i,因此 $y=G[i]$。 在“linear”插值模式中,$x$ 被映射到较低的索引 $i0$,因此 $y=(1−p)G[i_0]+pG[i_0+1]$。
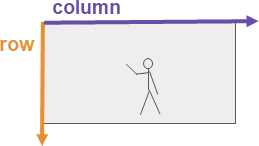
矩阵的坐标按(行,列)的顺序定义。 这意味着第一个坐标表示行,第二个坐标表示列。 这并不一定意味着存储顺序是行优先或列优先。 Eigen 默认使用行优先存储。
图像被视为矩阵。 图像的像素坐标以与矩阵相同的(行、列)顺序定义。 为了避免混淆,Isaac 通常不使用 x 或 y 来指代像素坐标,而是使用行或列。 图像总是以列优先存储顺序存储。 坐标为 (0,0) 的像素位于左上角。
向量顺序为: - 0: row - 1: column
相机帧中的 3D 点 (x,y,z) 如下图所示。 x 轴指向右侧,y 轴指向下方,z 轴指向相机外的世界。 如果将相机坐标中的 3D 点投影到图像上,则坐标将切换为遵循上述(行,列)顺序的图像坐标。
向量顺序为: - 0: right - 1: down - 2: forward

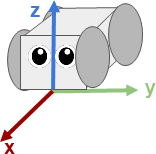
选择移动基座的机器人坐标系,使 x 轴指向前方,y 轴指向左侧,z 轴指向上方。 坐标系的中心一般放在地面上,机器人的旋转中心。 对于 Carter,机器人坐标系位于两个主轮之间的中心。
向量顺序是:
0: forward
1: left
2: up