


571
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
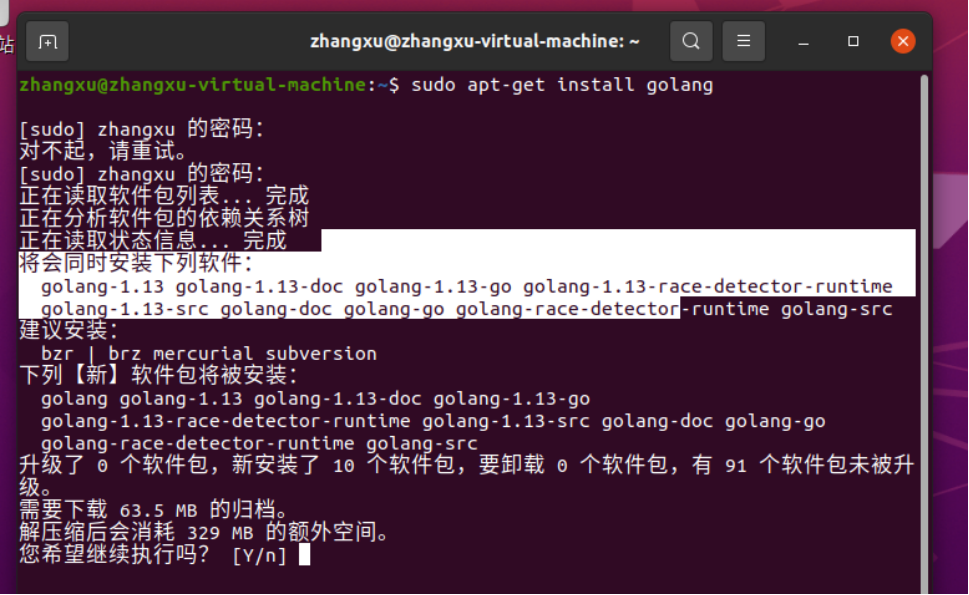
分享1,下载go语言并配置环境

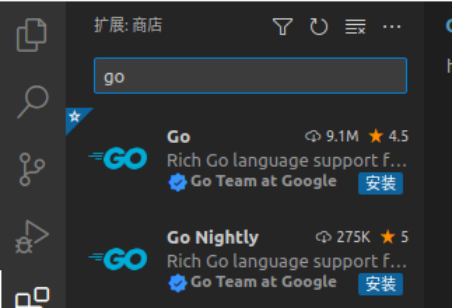
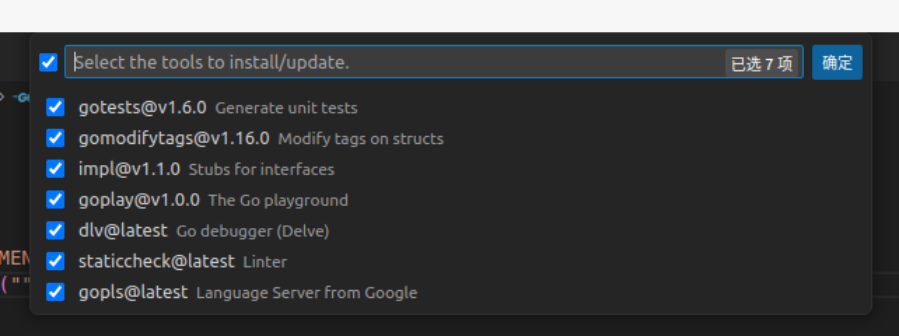
2,go插件
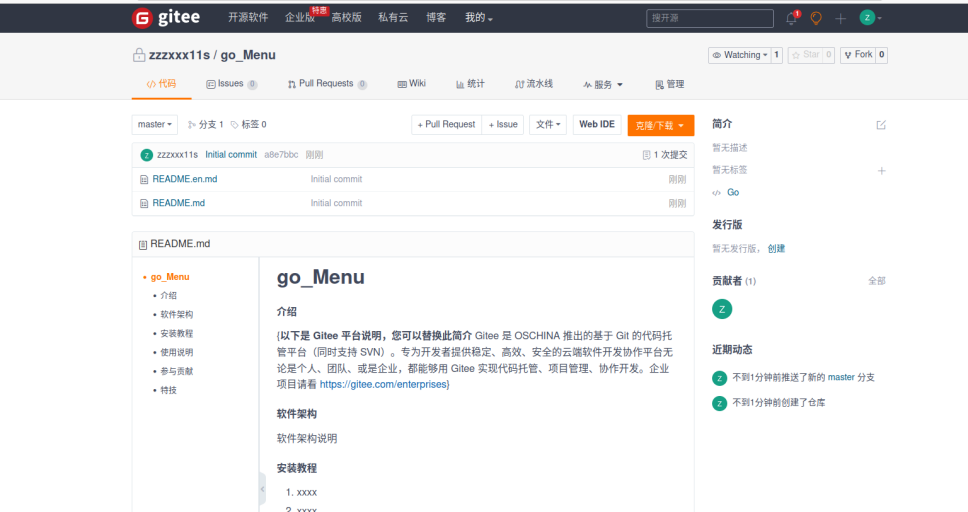
3,新建代码仓库并克隆到本地

4,编写menu程序并运行
package main
import "fmt"
func main() {
var cmd string
for {
fmt.Print("Please input a command: ")
fmt.Scanln(&cmd)
switch cmd {
case "help":
fmt.Println("This is help command.")
case "quit":
fmt.Println("Bye.")
return
default:
fmt.Println("Wrong command!")
}
}
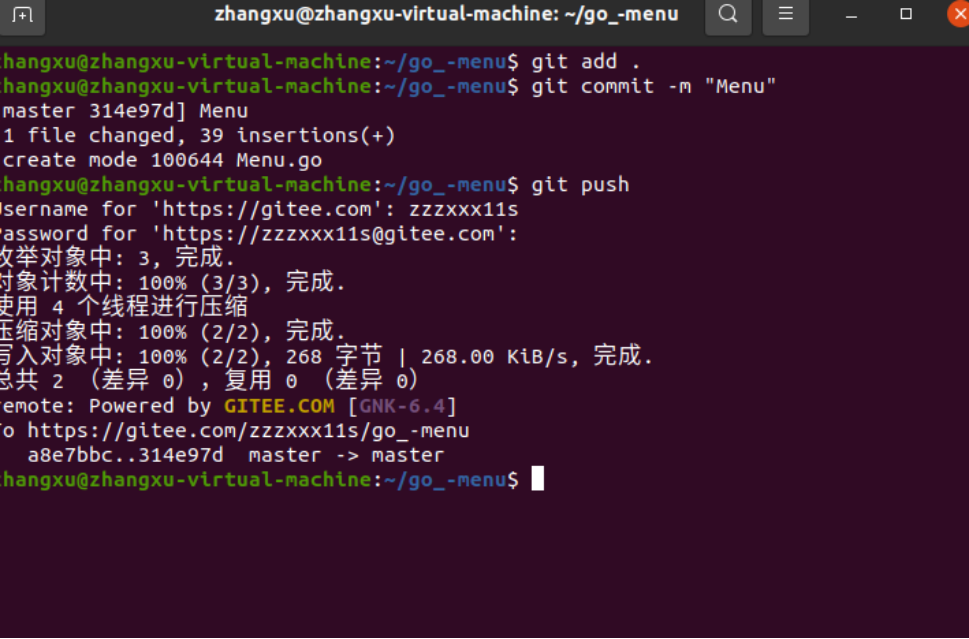
5,提交代码到远程仓库完成
学号:485

