社区
字家智能
技术问答
帖子详情
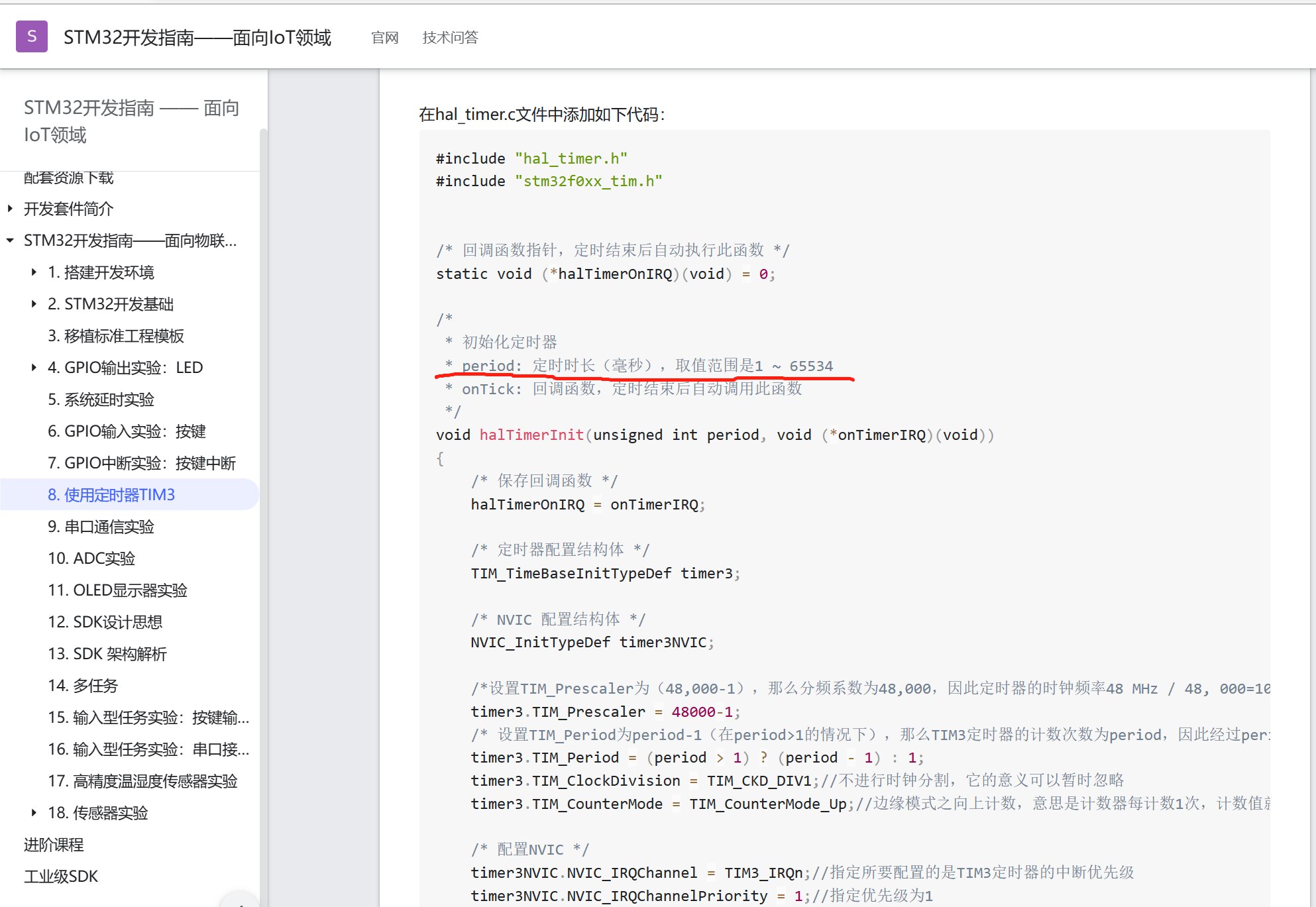
为什么这里period参数的取值范围是1 ~ 65534而不是1~65535?
weixin_47586812
2023-05-31 12:35:21
...全文
101
4
打赏
收藏
为什么这里period参数的取值范围是1 ~ 65534而不是1~65535?
[图片]
复制链接
扫一扫
分享
转发到动态
举报
AI
作业
写回复
配置赞助广告
用AI写文章
4 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
CSDN-Ada助手
2023-05-31
精选
打赏
举报
回复
您的问题已经帮您同步至问答, 链接:
https://ask.csdn.net/questions/7955015
, 请您保持关注, 如果回答有帮助解决此问题, 麻烦您动动小手给相关的回答点赞, Ada会在评论区为您更新结题状态
Duckeeer
2023-05-31
打赏
举报
回复
这个可能是注释写错了,我们检查一下,很抱歉给您造成不便!
weixin_47586812
2023-05-31
举报
回复
@Duckeeer
请问正确结果应该是什么?
Duckeeer
2023-06-01
举报
回复
@weixin_47586812
1~65536
linux 的调度策略与优先级
linux 的调度策略与优先级 参考资料如下: man手册man 7 sched 内核文档 Documentation/scheduler。 首先需要说明,我们常说的进程调度器是传统的说法,但是实际上进程是资源管理的单位,线程才是调度的单位.有时也会说任务调度等。 linux的调度机制由调度策略(policies)和优先级(priority)两个属性共同决定.其中调度策略又可以分为实时调度策略和通用调度策略(非实时)。其中通用调度策略的优先级值为0.而实时调度策略的优先级
取值范围
为1~99.可以看出,实
STM32-PWM-驱动舵机
上面介绍了,舵机的周期要求为20ms,则频率为1/20ms,为50hz,所以设置ARR为20000-1,PSCW为72-1。还要求了高电平宽度为0.5ms~2.5ms,则占空比为2.5%~12.5%,则CCR的
取值范围
为a/20000=2.5%,a/20000=12.5%.a=500和a=2500。我们现在知道Y(CCR)的
取值范围
为500~2500,x(角度)的
取值范围
为0-180,带入上列函数,求出K=2000/180,B=500.这里的K不使用具体的值提高准确率。第五步,包装修改CCR值的函数。
STM32定时器
参数
设置
已知
参数
:系统时钟Tclk,想要设置成定时器时钟频率Td和想要多久延时一次的时间t 需要设置
参数
有:分频系数Prescaler,自动装载值Counter_
Period
,如果应用PWM时还有占空比
参数
Pulse. Tclk/(Prescaler+1)=Td 如果系统时钟Tclk==72MHz,定时器时钟频率Td=1MHz, 那么 Pres
【STC库函数】PWM的使用
结构体的第三个是duty占空比,实际上是设计阈值,这个值的范围是0~
65535
,我们使用PWM模式1,所以当计数器的值小于这个阈值的时候输出有效电平,而计数器的值的上限是刚刚自动重装载寄存器的值,所以通过设置duty和
period
的比例可以调整占空比。PWM模式1比较常用,向上计数的时候(一般也就是向上计数),当计数器的值小于阈值的时候OCnREF输出高,也就是输出有效电平,反之输出反,这个有效电平是可以由我们自己设置的,可以是高电平或者是低电平。其他更多的功能详情小伙伴可以自行去手册里查看。
XGBoost
参数
解释
前言 本文中针对XGBoost的
参数
说明进行部分翻译得来,原文链接。因而本文中只对一些关键
参数
进行了翻译,且由于本人能力有限,文中难免存在错误的地方,还望指正。以下是大致翻译内容。 在运行XGboost之前, 我们必须设置三种类型的
参数
: 通用
参数
(general parameters),Booster
参数
(booster parameters)和学习目标
参数
(task parameters...
字家智能
786
社区成员
518
社区内容
发帖
与我相关
我的任务
字家智能
专注IoT低代码开发
复制链接
扫一扫
分享
社区描述
专注IoT低代码开发
物联网
技术论坛(原bbs)
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
专注IoT低代码开发
试试用AI创作助手写篇文章吧
+ 用AI写文章


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享




