2,158
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
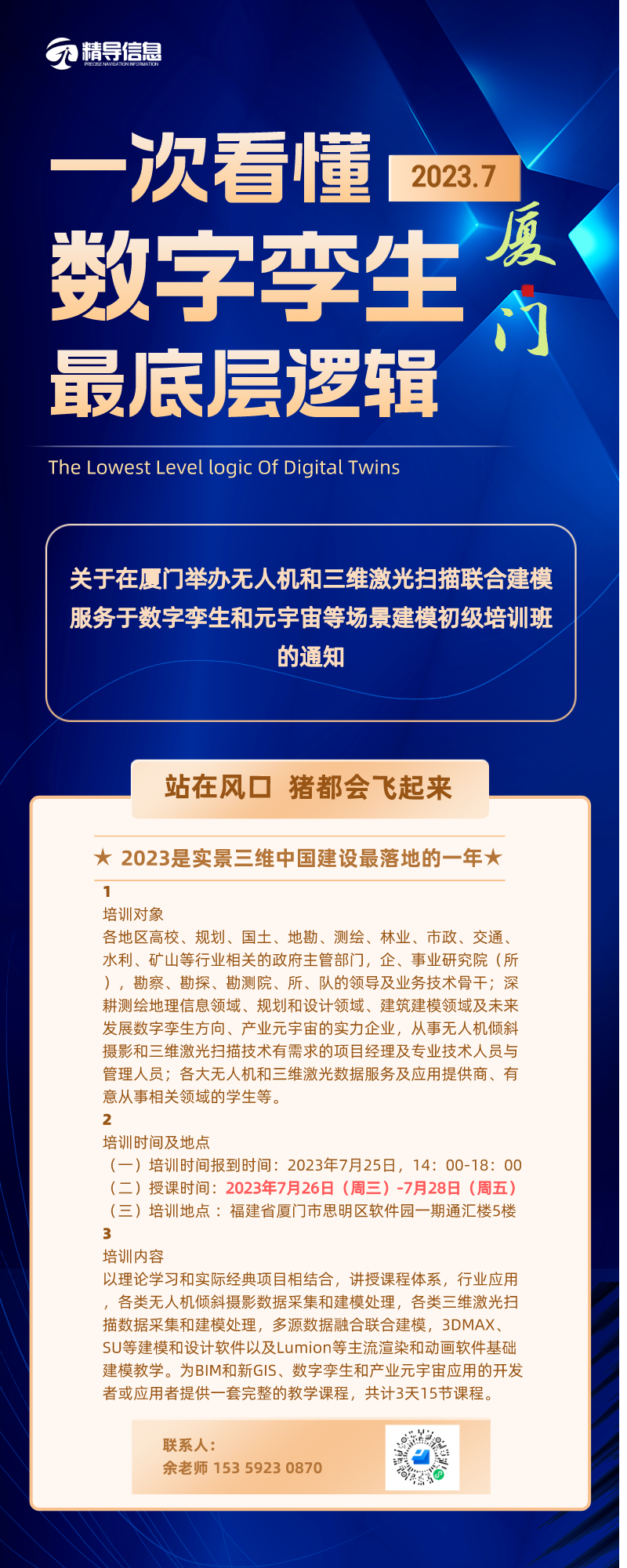
分享这个暑假怎么过?不妨来看看这场培训吧!大牛导师带队,带你玩转“数字孪生”底层逻辑——扫描建模。
2023年7月26日-28日,福建厦门,精导公司推出“关于在厦门举办无人机和三维激光扫描联合建模服务于数字孪生和元宇宙等场景建模”初级培训课程。以理论学习和实际经典项目相结合,讲授课程体系,行业应用,各类无人机倾斜摄影数据采集和建模处理,各类三维激光扫描数据采集和建模处理,多源数据融合联合建模,3DMAX、SU等建模和设计软件以及Lumion等主流渲染和动画软件基础建模教学。为BIM和新GIS、数字孪生和产业元宇宙应用的开发者或应用者提供一套完整的教学课程,共计3天15节课程。