社区
Access
帖子详情
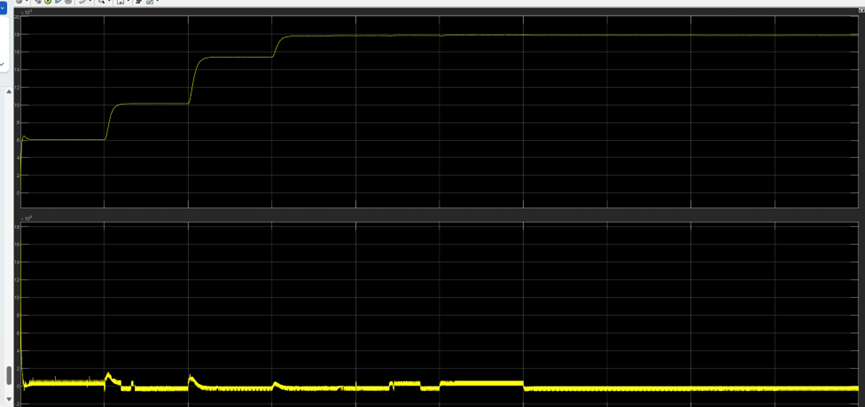
simulink积分器输入为负,积分值上升或者不变
花 椰 菜
2023-08-15 17:24:25
...全文
869
1
打赏
收藏
simulink积分器输入为负,积分值上升或者不变
[图片]
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
1 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
CSDN-Ada助手
2023-08-15
精选
打赏
举报
回复
您的问题已经帮您同步至问答, 链接:
https://ask.csdn.net/questions/7989155
, 请您保持关注, 如果回答有帮助解决此问题, 麻烦您动动小手给相关的回答点赞, Ada会在评论区为您更新结题状态
Access
7,732
社区成员
28,799
社区内容
发帖
与我相关
我的任务
Access
Microsoft Office Access是由微软发布的关系数据库管理系统。它结合了 MicrosoftJet Database Engine 和 图形用户界面两项特点。
复制链接
扫一扫
分享
社区描述
Microsoft Office Access是由微软发布的关系数据库管理系统。它结合了 MicrosoftJet Database Engine 和 图形用户界面两项特点。
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享

