


43
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享

2.电池:2至3节18650电池(可升压降压,升降配散热)
3.主控芯片(单片机):STM32(常用),Arduino(常用),ESP32,Pi Pico,Pi 3/4B
4.车轮电机:
(1).电机配减速箱,a. 通过齿轮达到减速的目的。b. 提高力矩,减速比越大,力矩也越大

(2).电机种类:
a.无刷电机:优点: 没有损耗,有刷电机有寿命 ,静音;

b.有刷电机:首先考虑转速和额定电压

(3).连接车轮与驱动模块(常用:L298N)
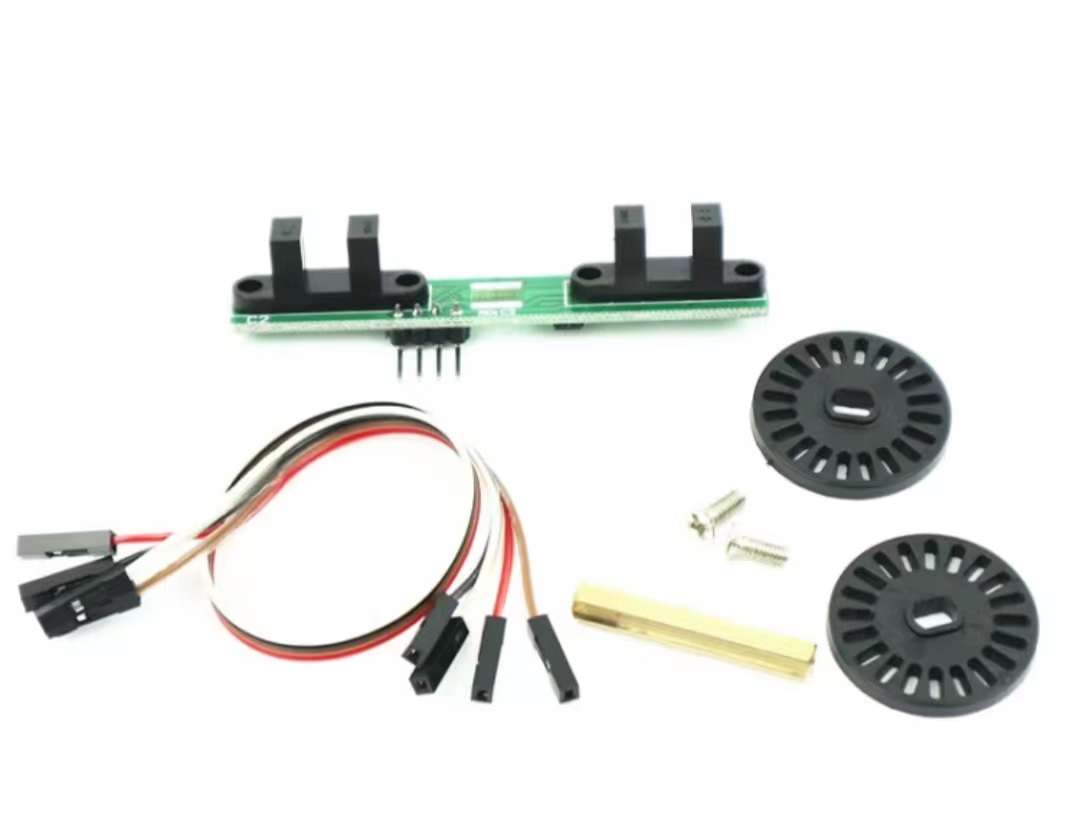
5.测速:
(1).霍尔传感器(优:a.固态设备,而且没有活动部件,所以不会出现摩擦及磨损,理论上有无限寿命;b.稳固,高重复性,几乎免维护;c.不受振动,灰尘和水的影响;缺:易受磁场影响;高温影响灵敏度)

(2).光电传感器(优:a.暂态响应范围宽,谐波测量能力强;b.数字接口,通信能力强;c.体积小,重量轻、易升级,满足变电站小型化与紧凑型的要求;缺:易受强光影响)
6.避障:
(1).红外循迹(受光影响大,低处测距),
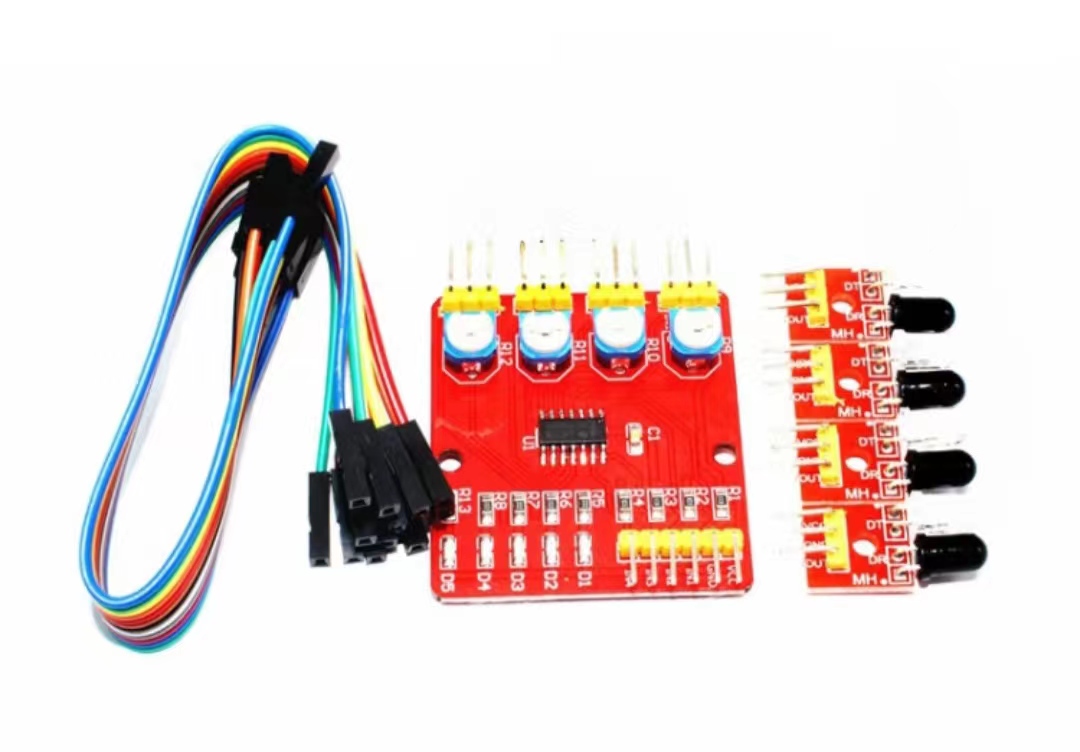
(2).超声波传感器(大而突兀,直线测距) (两者可联合使用)

7.其他(蓝牙小车:蓝牙模块;声控小车:声控模块)


