


39
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享目录
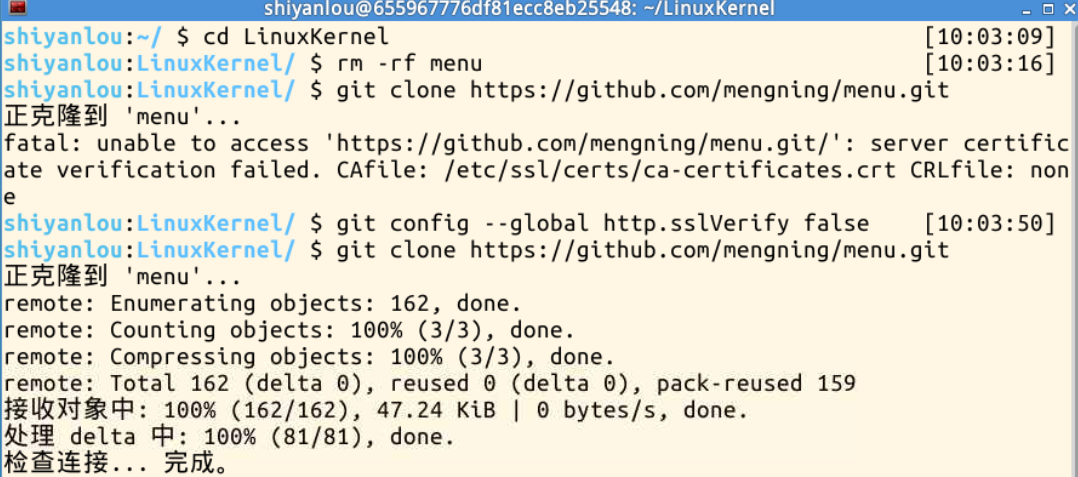
删除实验楼初始的menu并重新克隆编译
在当前文件夹下通过以下命令启动QEMU
qemu -kernel linux-3.18.6/arch/x86/boot/bzImage -initrd rootfs.img -S -s

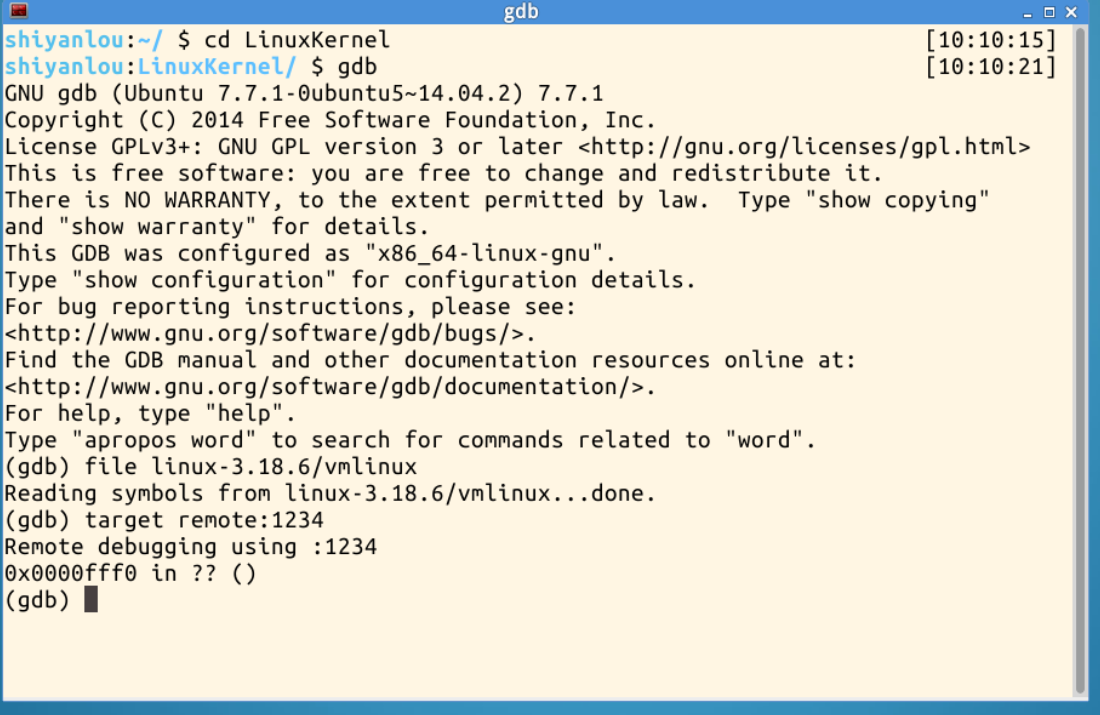
另开一个终端,使用gdb进行调试
cd ./LinuxKernel
gdb
file linux-3.18.6/vmlinux
target remote:1234
然后在schedule、context_switch、switch_to、pick_next_task处设置断点
b schedule
b context_switch
b switch_to
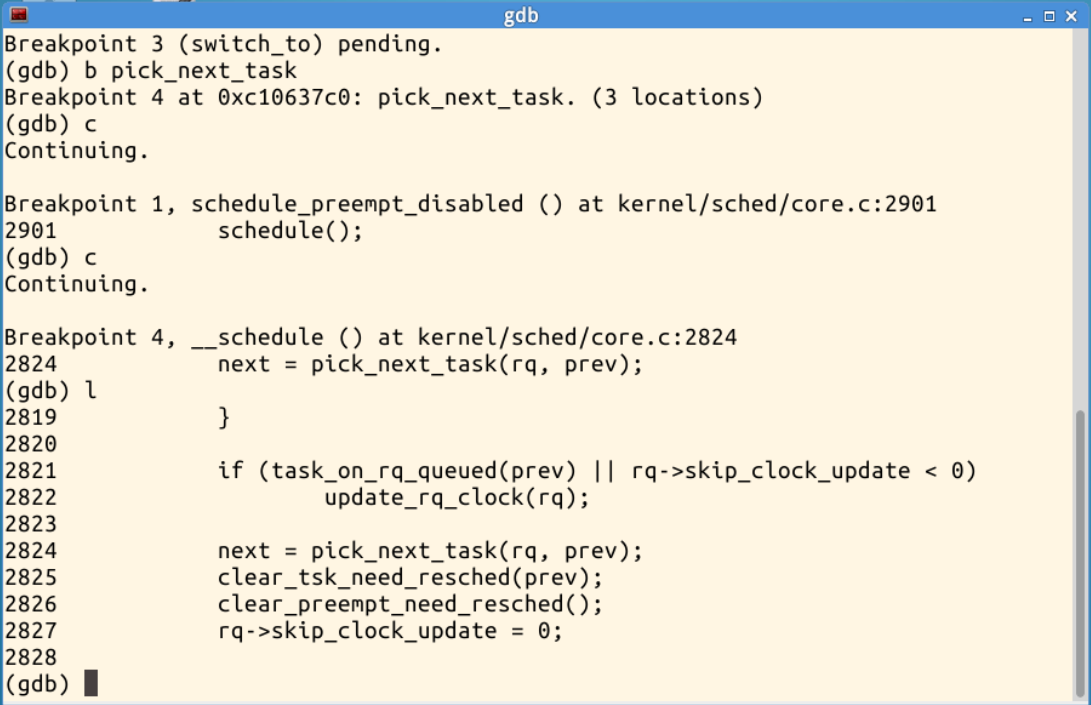
b pick_next_task
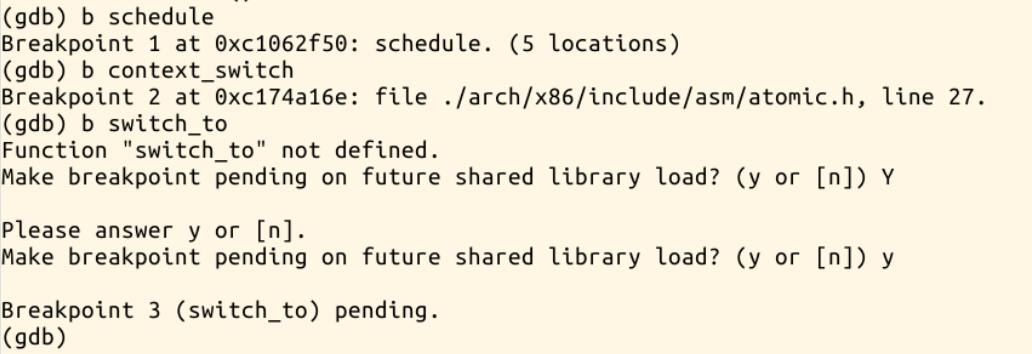
switch_to为宏定义,不能设置断点。
接着开始运行,观察断点情况。
pich_next_task函数负责根据调度策略和调度算法选择下一个进程。pich_next_task函数断点如下:
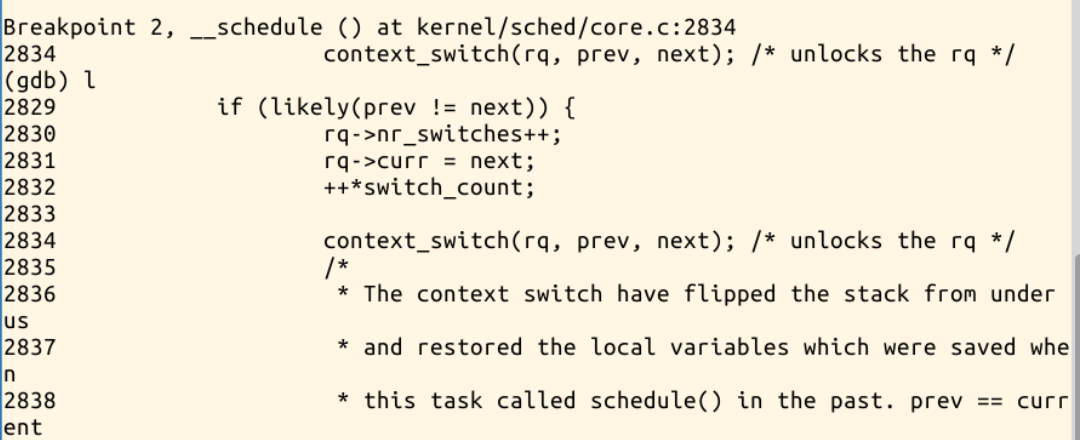
context_switch函数实现进程切换。context_switch函数断点如下:
switch_to为宏定义,不能设置断点,查看其内联汇编代码:
asm volatile(
"pushfl\n\t" //保存当前进程flags
"pushl %%ebp\n\t" //当前进程堆栈基址压栈
"movl %%esp,%[prev_sp]\n\t" //保存ESP,将当前堆栈栈顶保存起来
"movl %[next_sp],%%esp\n\t" //更新ESP,将下一栈顶保存到ESP中
// 完成内核堆栈的切换
"movl $1f,%[prev_ip]\n\t" //保存当前进程的EIP
"pushl %[next_ip]\n\t" //将next进程起点压入堆栈,即next进程的栈顶为起点
__switch_canary //next_ip一般为$1f,对于新创建的子进程是ret_from_fork
"jmp __switch_to\n" //prve进程中,设置next进程堆栈,jmp与call不同,是通过寄存器传递参数(call通过堆栈),所以ret时弹出的是之前压入栈顶的next进程起点
//完成EIP的切换
"1:\t" //next进程开始执行
"popl %%ebp\n\t" //restore EBP
"popfl\n" //restore flags
//输出量
: [prev_sp] "=m" (prev->thread.sp), //保存当前进程的esp
[prev_ip] "=m" (prev->thread.ip), //保存当前进仓的eip
"=a" (last),
//要破坏的寄存器
"=b" (ebx), "=c" (ecx), "=d" (edx),
"=S" (esi), "=D" (edi)
__switch_canary_oparam
//输入量
: [next_sp] "m" (next->thread.sp), //next进程的内核堆栈栈顶地址,即esp
[next_ip] "m" (next->thread.ip), //next进程的eip
// regparm parameters for __switch_to():
[prev] "a" (prev),
[next] "d" (next)
__switch_canary_iparam
: //重新加载段寄存器
"memory");



