



35,874
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享@
霸道 STM32F103 是野火推出的一款基于 ARM Cortex-M3 内核的开发板,最高主频为 72Mhz,该开发板具有丰富的板载资源,可以充分发挥 STM32F103 的芯片性能。
开发板外观如下图所示:
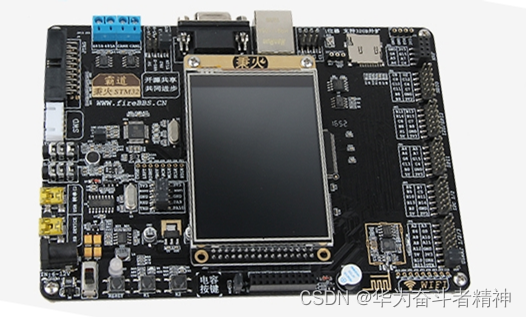
该开发板常用 板载资源 如下:
MCU:STM32F103ZET6,主频 72MHz,512KB FLASH ,64KB RAM
外部 RAM:IS62WV51216BLL(SRAM,1MB)
外部 FLASH:W25Q64(SPI,8MB)
常用外设
LED:1个RGB灯;2个普通LED,D4(蓝色,PF7),D5(蓝色,PF8)
按键:2个,K1(兼具唤醒功能,PA0),K2(PC13)
常用接口:USB 转串口、SD 卡接口、以太网接口、LCD 接口
调试接口,标准 JTAG/SWD
开发板更多详细信息请参考 野火官方淘宝店铺宝贝介绍。
野火霸道 STM32F103 板级支持包提供 MDK4、MDK5 和 IAR 工程,并且支持 GCC 开发环境,下面以 MDK5 开发环境为例,介绍如何将示例程序运行起来。运行示例程序前需要做如下准备工作:
需要安装 MDK-ARM 5.24 (正式版或评估版,5.14 版本及以上版本均可),这个版本也是当前比较新的版本,它能够提供相对比较完善的调试功能。安装方法可以参考 Keil MDK安装。
从 Github 获取 或 从 Gitee 获取。
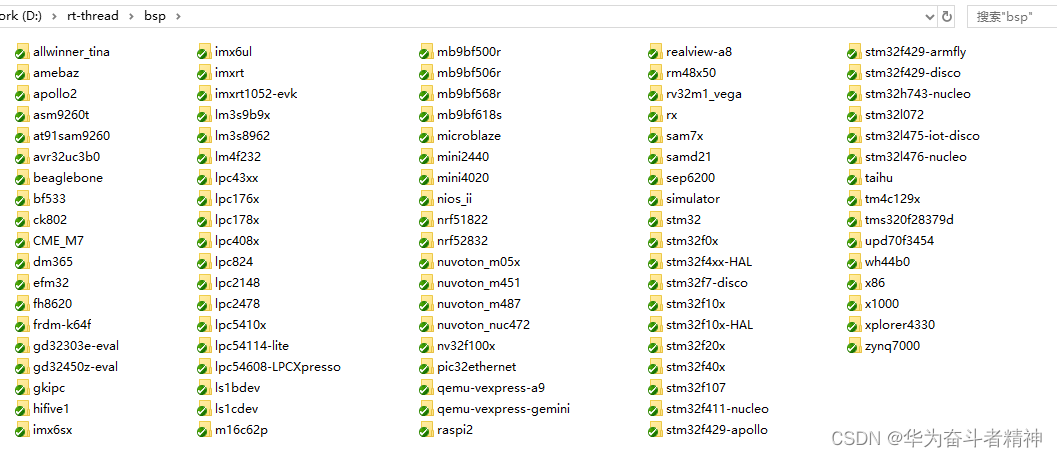
下图是打开 rt-thread 源码的目录,下表是该目录的简单说明。

目录名 描述
bsp Board support package,RT-Thread 板级支持包
(IAR/MDK 工程在 BSP 目录下的具体的 BSP 中)
components RT-Thread 的各个组件目录
documentation 一些说明文件,如代码风格说明
include RT-Thread 内核的头文件
libcpu 各类芯片的移植代码,此处包含了 STM32 的移植文件
src RT-Thread 内核的源文件
tools RT-Thread 命令构建工具的脚本文件
BSP 目录
打开 BSP 目录,里面包含 RT-Thread 已经支持的所有 bsp

如打开bsp stm32f407-atk-explorer,下表是该目录的简单说明。
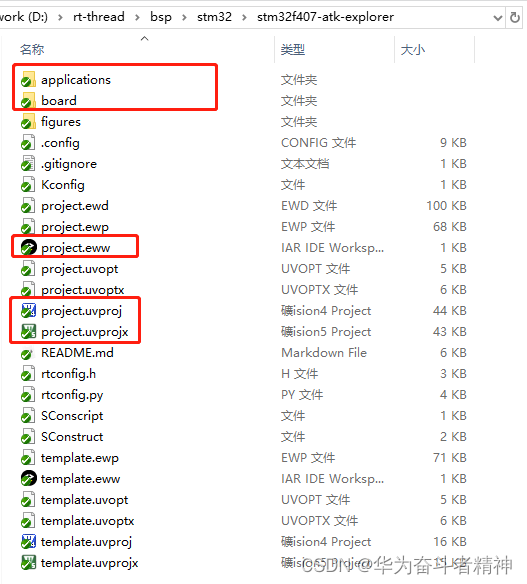
目录名 描述
applications RT-Thread 应用程序
board 与开发板相关的配置文件
project.eww
project.uvproj
project.uvprojx iar 的工程文件
keil4 工程文件
keil5 工程文件

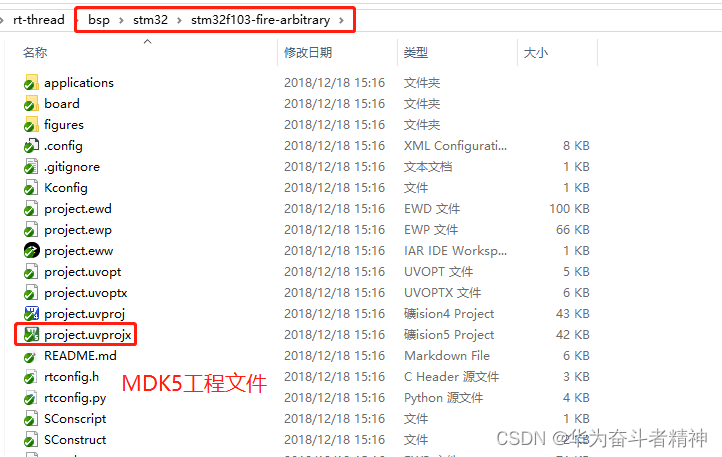
进入到 rt-thread\bsp\stm32\stm32f103-fire-arbitrary 文件夹中,双击 project.uvprojx 文件,打开 MDK5 工程。
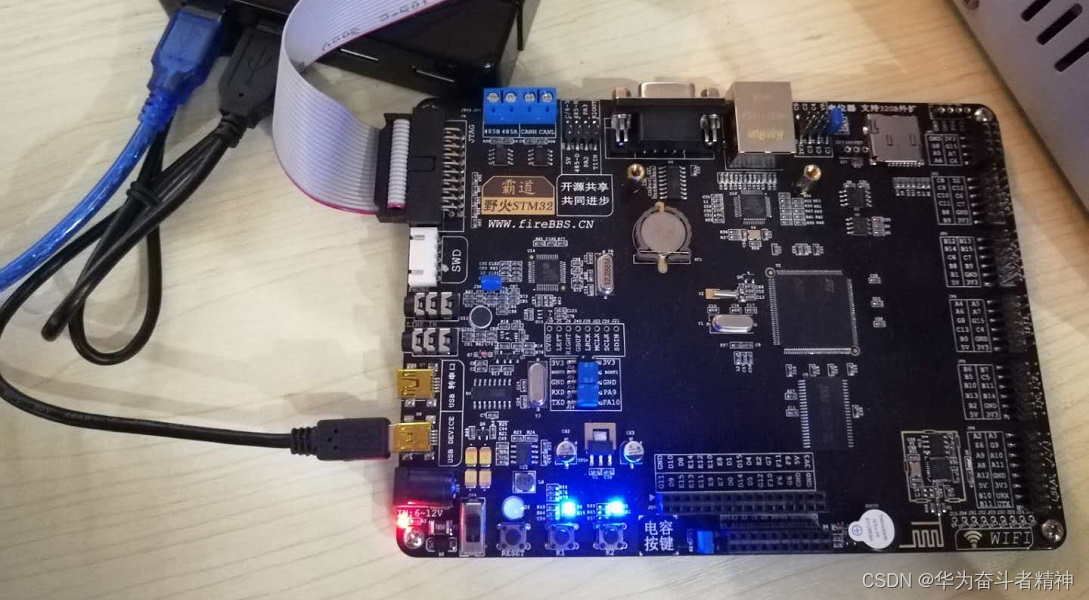
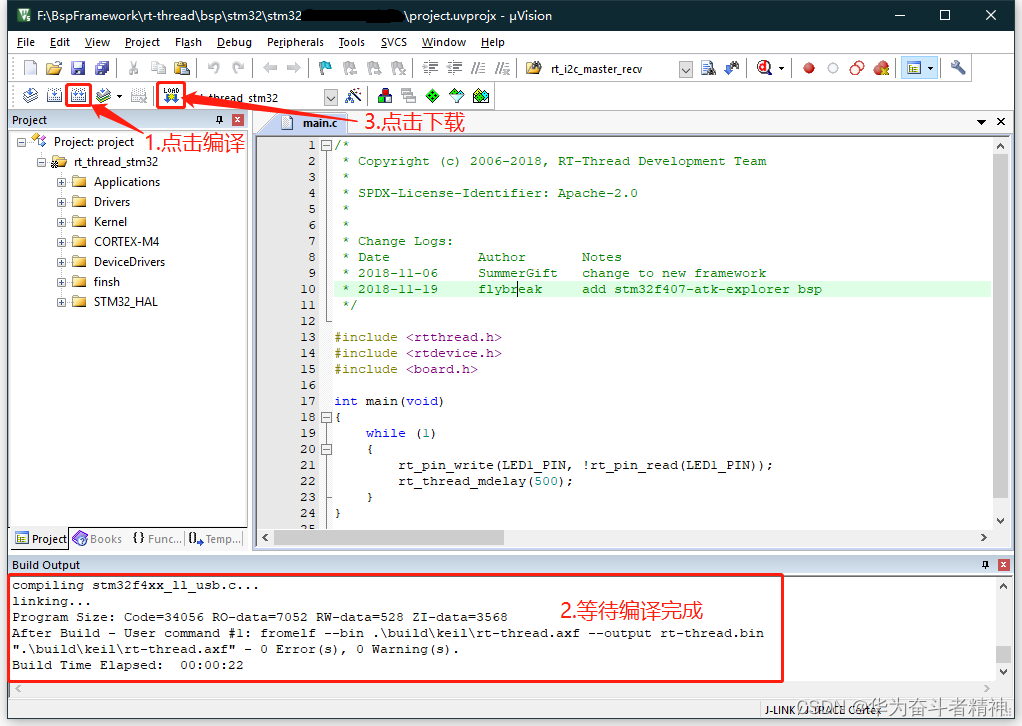
执行编译,编译完成后,点击下载按钮将固件下载至开发板,下载完成后,程序会自动开始运行,观察程序运行状况。
提示:工程默认配置使用 JLink 下载程序,在通过 JLink 连接开发板的基础上,点击下载按钮即可下载程序到开发板
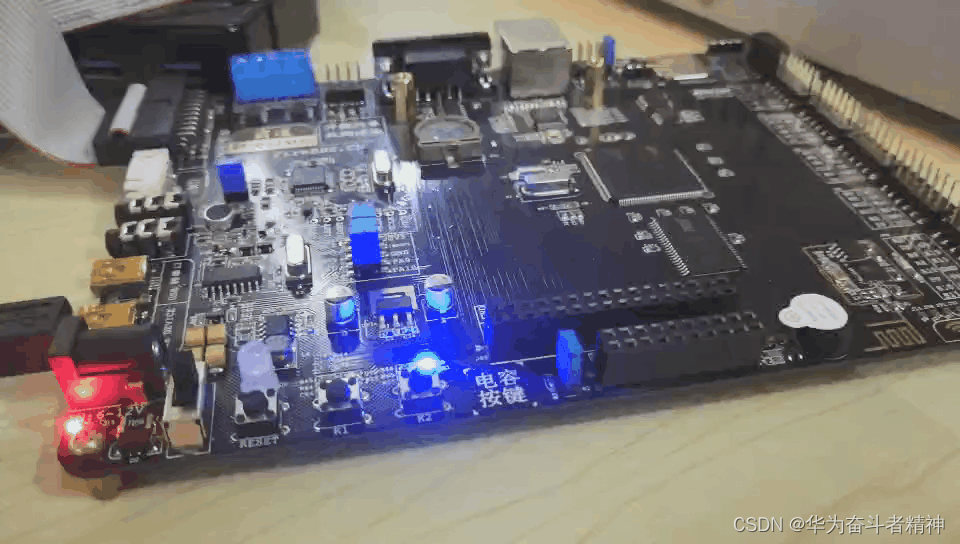
如没有自动运行,按下复位按键重启开发板,观察开发板上 LED 的实际效果。正常运行后,LED 灯会周期性闪烁,如下图所示:
连接开发板对应串口到 PC , 在串口工具里打开相应的串口(115200-8-1-N) ,复位设备后,可以看到 RT-Thread 的输出信息:
提示:注:野火一键下载电路和终端工具冲突,在使用终端工具如:PuTTy、XShell 时,会出现系统不能启动的问题,推荐使用串口调试助手如:sscom
\ | /
- RT - Thread Operating System
/ | \ 3.1.1 build Nov 19 2018
2006 - 2018 Copyright by rt-thread team
msh >
已完成 RT-Thread 快速上手!点击这里进行 内核学习 。
/*
* Copyright (c) 2006-2023, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2006-03-17 Bernard the first version
* 2006-04-28 Bernard fix the scheduler algorthm
* 2006-04-30 Bernard add SCHEDULER_DEBUG
* 2006-05-27 Bernard fix the scheduler algorthm for same priority
* thread schedule
* 2006-06-04 Bernard rewrite the scheduler algorithm
* 2006-08-03 Bernard add hook support
* 2006-09-05 Bernard add 32 priority level support
* 2006-09-24 Bernard add rt_system_scheduler_start function
* 2009-09-16 Bernard fix _rt_scheduler_stack_check
* 2010-04-11 yi.qiu add module feature
* 2010-07-13 Bernard fix the maximal number of rt_scheduler_lock_nest
* issue found by kuronca
* 2010-12-13 Bernard add defunct list initialization even if not use heap.
* 2011-05-10 Bernard clean scheduler debug log.
* 2013-12-21 Grissiom add rt_critical_level
* 2018-11-22 Jesven remove the current task from ready queue
* add per cpu ready queue
* add _scheduler_get_highest_priority_thread to find highest priority task
* rt_schedule_insert_thread won't insert current task to ready queue
* in smp version, rt_hw_context_switch_interrupt maybe switch to
* new task directly
* 2022-01-07 Gabriel Moving __on_rt_xxxxx_hook to scheduler.c
* 2023-03-27 rose_man Split into scheduler upc and scheduler_mp.c
* 2023-10-17 ChuShicheng Modify the timing of clearing RT_THREAD_STAT_YIELD flag bits
*/
#include <rtthread.h>
#include <rthw.h>
#define DBG_TAG "kernel.scheduler"
#define DBG_LVL DBG_INFO
#include <rtdbg.h>
rt_list_t rt_thread_priority_table[RT_THREAD_PRIORITY_MAX];
rt_uint32_t rt_thread_ready_priority_group;
#if RT_THREAD_PRIORITY_MAX > 32
/* Maximum priority level, 256 */
rt_uint8_t rt_thread_ready_table[32];
#endif /* RT_THREAD_PRIORITY_MAX > 32 */
extern volatile rt_uint8_t rt_interrupt_nest;
static rt_int16_t rt_scheduler_lock_nest;
struct rt_thread *rt_current_thread = RT_NULL;
rt_uint8_t rt_current_priority;
#ifndef __on_rt_scheduler_hook
#define __on_rt_scheduler_hook(from, to) __ON_HOOK_ARGS(rt_scheduler_hook, (from, to))
#endif
#ifndef __on_rt_scheduler_switch_hook
#define __on_rt_scheduler_switch_hook(tid) __ON_HOOK_ARGS(rt_scheduler_switch_hook, (tid))
#endif
#if defined(RT_USING_HOOK) && defined(RT_HOOK_USING_FUNC_PTR)
static void (*rt_scheduler_hook)(struct rt_thread *from, struct rt_thread *to);
static void (*rt_scheduler_switch_hook)(struct rt_thread *tid);
/**
* @addtogroup Hook
*/
/**@{*/
/**
* @brief This function will set a hook function, which will be invoked when thread
* switch happens.
*
* @param hook is the hook function.
*/
void rt_scheduler_sethook(void (*hook)(struct rt_thread *from, struct rt_thread *to))
{
rt_scheduler_hook = hook;
}
/**
* @brief This function will set a hook function, which will be invoked when context
* switch happens.
*
* @param hook is the hook function.
*/
void rt_scheduler_switch_sethook(void (*hook)(struct rt_thread *tid))
{
rt_scheduler_switch_hook = hook;
}
/**@}*/
#endif /* RT_USING_HOOK */
#ifdef RT_USING_OVERFLOW_CHECK
static void _scheduler_stack_check(struct rt_thread *thread)
{
RT_ASSERT(thread != RT_NULL);
#ifdef RT_USING_SMART
#ifndef ARCH_MM_MMU
struct rt_lwp *lwp = thread ? (struct rt_lwp *)thread->lwp : 0;
/* if stack pointer locate in user data section skip stack check. */
if (lwp && ((rt_uint32_t)thread->sp > (rt_uint32_t)lwp->data_entry &&
(rt_uint32_t)thread->sp <= (rt_uint32_t)lwp->data_entry + (rt_uint32_t)lwp->data_size))
{
return;
}
#endif /* not defined ARCH_MM_MMU */
#endif /* RT_USING_SMART */
#ifndef RT_USING_HW_STACK_GUARD
#ifdef ARCH_CPU_STACK_GROWS_UPWARD
if (*((rt_uint8_t *)((rt_ubase_t)thread->stack_addr + thread->stack_size - 1)) != '#' ||
#else
if (*((rt_uint8_t *)thread->stack_addr) != '#' ||
#endif /* ARCH_CPU_STACK_GROWS_UPWARD */
(rt_ubase_t)thread->sp <= (rt_ubase_t)thread->stack_addr ||
(rt_ubase_t)thread->sp >
(rt_ubase_t)thread->stack_addr + (rt_ubase_t)thread->stack_size)
{
rt_base_t level;
rt_kprintf("thread:%s stack overflow\n", thread->parent.name);
level = rt_hw_interrupt_disable();
while (level);
}
#endif
#ifdef ARCH_CPU_STACK_GROWS_UPWARD
#ifndef RT_USING_HW_STACK_GUARD
else if ((rt_ubase_t)thread->sp > ((rt_ubase_t)thread->stack_addr + thread->stack_size))
#else
if ((rt_ubase_t)thread->sp > ((rt_ubase_t)thread->stack_addr + thread->stack_size))
#endif
{
rt_kprintf("warning: %s stack is close to the top of stack address.\n",
thread->parent.name);
}
#else
#ifndef RT_USING_HW_STACK_GUARD
else if ((rt_ubase_t)thread->sp <= ((rt_ubase_t)thread->stack_addr + 32))
#else
if ((rt_ubase_t)thread->sp <= ((rt_ubase_t)thread->stack_addr + 32))
#endif
{
rt_kprintf("warning: %s stack is close to end of stack address.\n",
thread->parent.name);
}
#endif /* ARCH_CPU_STACK_GROWS_UPWARD */
}
#endif /* RT_USING_OVERFLOW_CHECK */
static struct rt_thread* _scheduler_get_highest_priority_thread(rt_ubase_t *highest_prio)
{
struct rt_thread *highest_priority_thread;
rt_ubase_t highest_ready_priority;
#if RT_THREAD_PRIORITY_MAX > 32
rt_ubase_t number;
number = __rt_ffs(rt_thread_ready_priority_group) - 1;
highest_ready_priority = (number << 3) + __rt_ffs(rt_thread_ready_table[number]) - 1;
#else
highest_ready_priority = __rt_ffs(rt_thread_ready_priority_group) - 1;
#endif /* RT_THREAD_PRIORITY_MAX > 32 */
/* get highest ready priority thread */
highest_priority_thread = rt_list_entry(rt_thread_priority_table[highest_ready_priority].next,
struct rt_thread,
tlist);
*highest_prio = highest_ready_priority;
return highest_priority_thread;
}
/**
* @brief This function will initialize the system scheduler.
*/
void rt_system_scheduler_init(void)
{
rt_base_t offset;
rt_scheduler_lock_nest = 0;
LOG_D("start scheduler: max priority 0x%02x",
RT_THREAD_PRIORITY_MAX);
for (offset = 0; offset < RT_THREAD_PRIORITY_MAX; offset ++)
{
rt_list_init(&rt_thread_priority_table[offset]);
}
/* initialize ready priority group */
rt_thread_ready_priority_group = 0;
#if RT_THREAD_PRIORITY_MAX > 32
/* initialize ready table */
rt_memset(rt_thread_ready_table, 0, sizeof(rt_thread_ready_table));
#endif /* RT_THREAD_PRIORITY_MAX > 32 */
}
/**
* @brief This function will startup the scheduler. It will select one thread
* with the highest priority level, then switch to it.
*/
void rt_system_scheduler_start(void)
{
struct rt_thread *to_thread;
rt_ubase_t highest_ready_priority;
to_thread = _scheduler_get_highest_priority_thread(&highest_ready_priority);
rt_current_thread = to_thread;
rt_schedule_remove_thread(to_thread);
to_thread->stat = RT_THREAD_RUNNING;
/* switch to new thread */
rt_hw_context_switch_to((rt_ubase_t)&to_thread->sp);
/* never come back */
}
/**
* @addtogroup Thread
* @cond
*/
/**@{*/



