高性能跨平台网络通信框架 HP-Socket v6.0.3

v6.0.3 更新
一、主要更新
- 优化Linux通信组件多路复用处理架构,避免“惊群”问题,提升性能。
- 自动为 HP-Socket 工作线程设置唯一线程名称,方便跟踪调试。
- TCP Client/Agent 以同步方式连接服务端时,支持通过
SetSyncConnectTimeout() 设置连接超时时间。 - 支持定时回收垃圾内存和被动回收垃圾内存(默认使用定时回收,回收间隔 15 秒)。
- Windows版本支持在没有安装 MFC 的环境下编译。
二、第三方库更新
- openssl 升级到 3.0.15 版本
- llhttp 升级到 9.2.1 版本
- mimalloc 升级到 2.1.7 版本
- zlib 升级到 1.3.1 版本
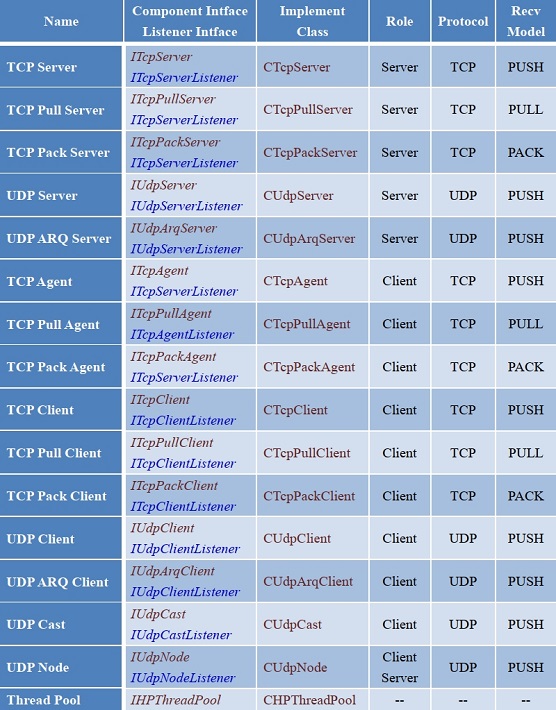
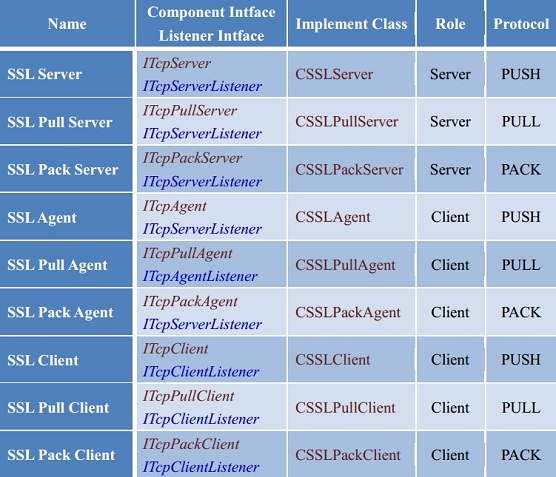
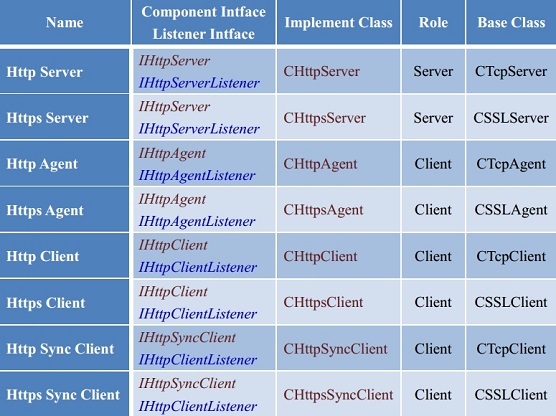
HP-Socket 组件列表



 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享