1,040
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享作用:在不确定环境中做出最优决策
随机过程:
其研究对象是随时间演变的随机现象。随机现象在某时刻的状态用St表示。因此P(St+1)=P(St+1|S1,S2,…,St) ,表示已知S1,S2,…,St时下一个时刻状态的概率。
马尔可夫过程:
具有马尔可夫性质(某时刻的状态只取决于上一时刻的状态)的随机过程。通常用元组<S,P>来描述。其中P指状态转移矩阵(函数)。
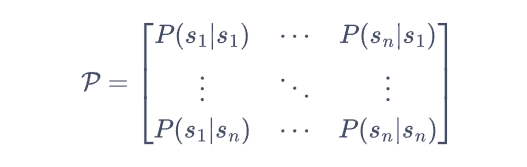
P(Sj|Si):第i行第j列元素表示从状态Si转移到Sj状态的概率。
需要注意的是:从某个状态出发,到达其他状态的概率和必须为 1,即状态转移矩阵的每一行的和为 1。
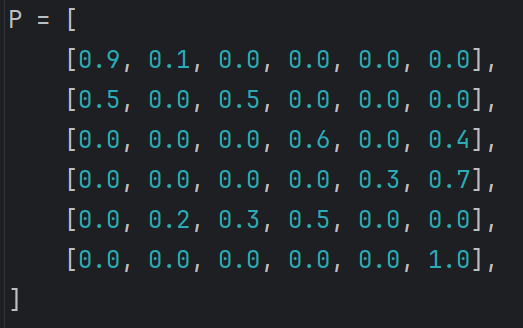
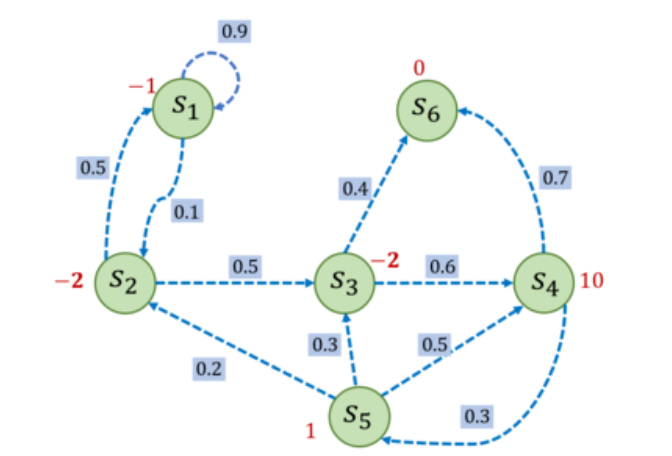
比如我们以下图的一个随机过程为例子:
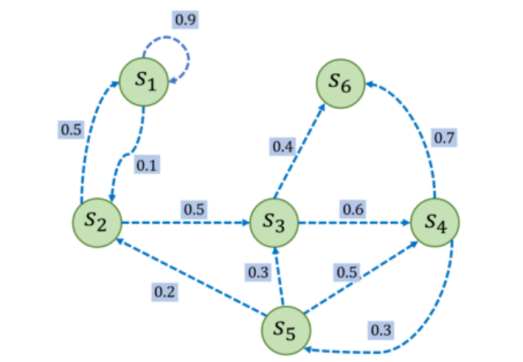
我们就可以写出其P(状态转移矩阵):
马尔可夫奖励过程(MRP)
我们在马尔可夫过程过程上
加入奖励函数r和折扣因子γ,
就是MRP

引入γ为的是降低远期收益的影响
Gt表示:从第St时刻状态开始,直到终止状态时,所有奖励的衰减之和称为回报
Rt表示:在t时刻时获得的奖励
有了上述公式
理论上就可以通过遍历所有路线从而计算出从S1开始,直到S6的最佳回报了
但是这样的话时间复杂度为O(n!),几乎不适用于复杂项目,而且适用性很低
因此我们需要引入价值函数V(s):直接估算出每个状态的回报
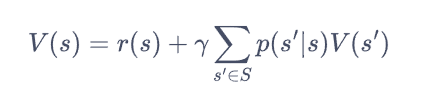
上述式子便是:贝尔曼方程
我们将r(s)写成列向量的R,从而有下述解析式:
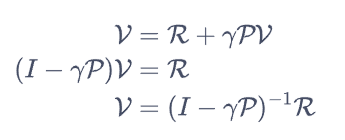
解得各个状态的估算回报,并且将时间复杂度降低为O(n3)。具体代码如下

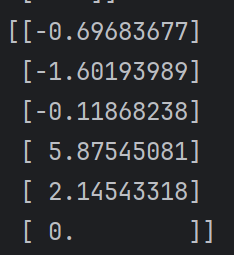
运行后有:
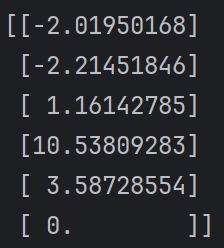
这时我们就可以清晰的观察到每个状态St到达S6时应有的回报
相比回报算法的来说,更为精确
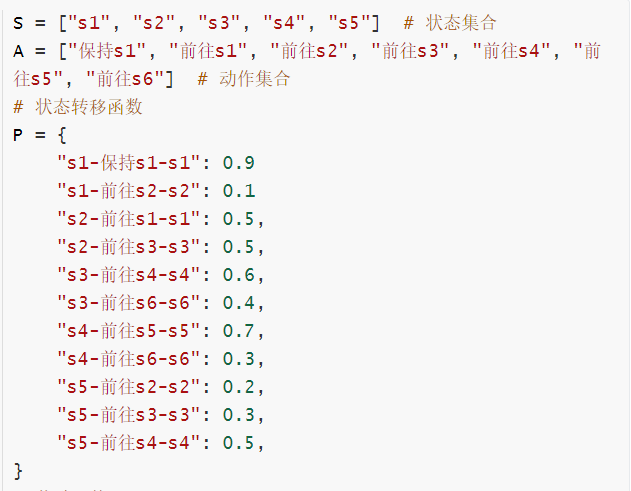
上述所讲的均是自发改变的随机过程,若我们引入一个动作变量a
则就是马尔可夫决策过程(MDP)
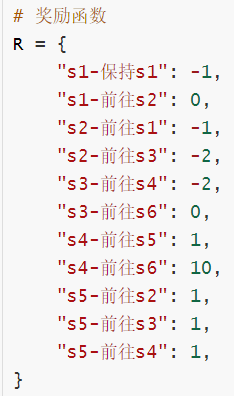
MRP中的奖励函数r和转移矩阵(函数)P将增加一个变量a,变成:

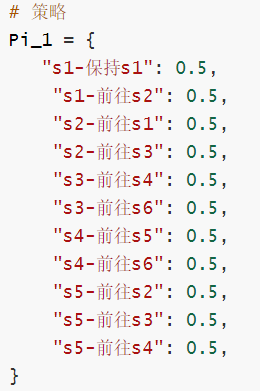
再引入概念 策略:

表示在输入状态s情况下采取动作a的概率
从而得到的MDP的过程图如图所示:
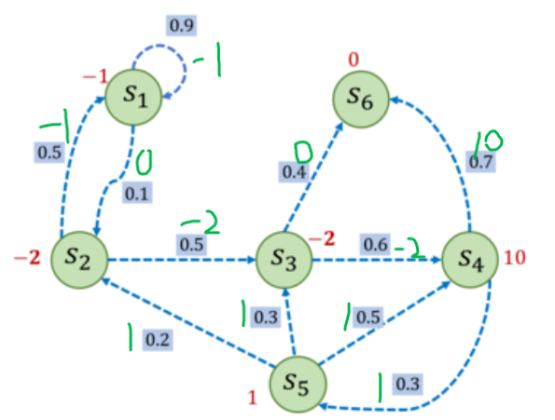
绿色为执行动作得到的奖励 红色为到达状态S得到的奖励 方框为执行状态转移的概率
最后引入 状态价值函数

状态s出发遵循策略Π能获得的期望回报
引入 动作价值函数

遵循策略Π时,当前状态s执行动作a得到的期望回报
从而得到贝尔曼期望方程



据MDP过程图片 可以给出如下表示
 根
根
可以看到此处使用的策略为随机策略
此时,我们若想要计算MDP的每个状态的回报
就需要将将其转化为MRP
方法则是:将策略的动作选择进行边缘化,就可以得到没有动作的 MRP 了。
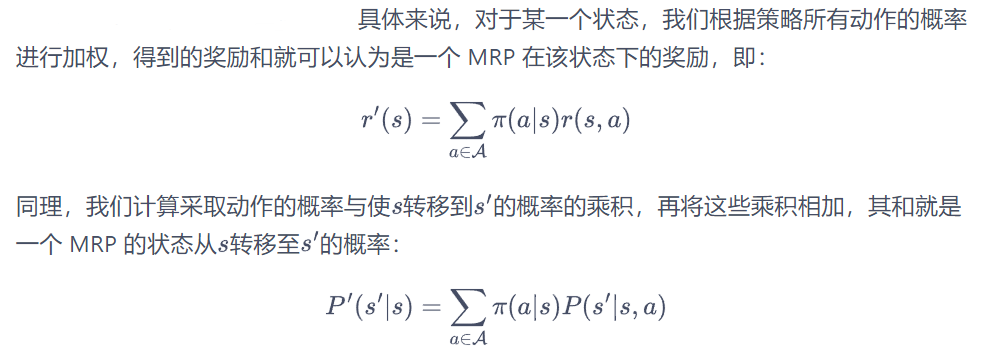
具体如下:
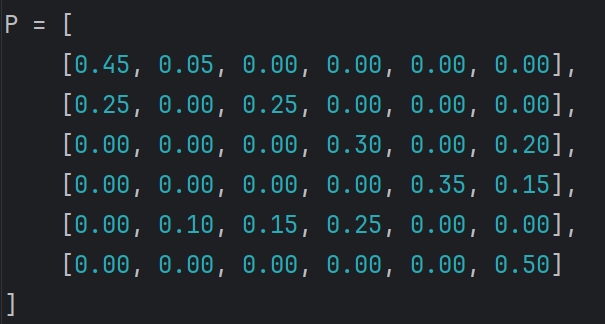
得到有:
转移矩阵
奖励函数

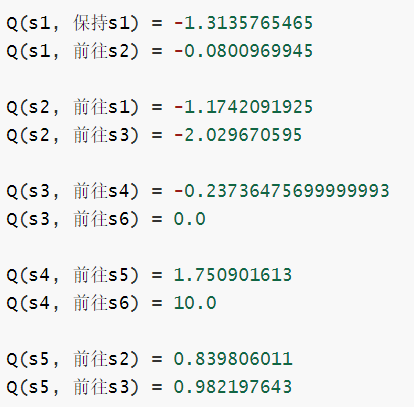
最终输出状态奖励函数:
便可以得出动作价值函数: