



10,441
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享2024年4月27日,2024 Elastic Meetup 重庆站活动成功举行。本次会议由 Elastic、新智锦绣联合举办,为广大开发人员及技术爱好者提供了分享技术经验和互相学习的平台。

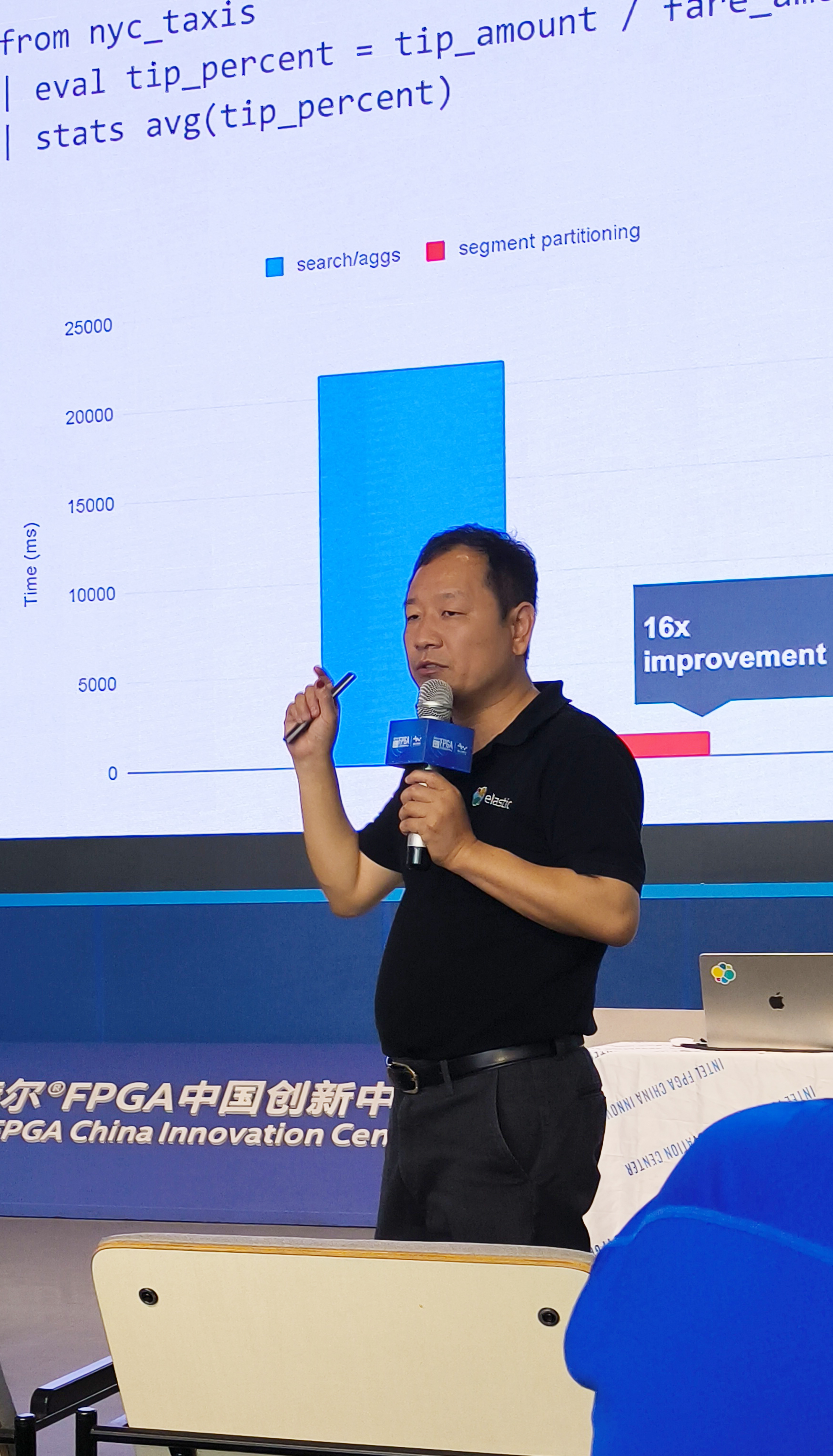
本次 Meetup 共有4个主题分享,Elastic 中国区首席布道师刘晓国,DaoCloud 可观测性产品研发谭建,Elastic 首席解决方案架构师李捷、威登普慧首席系统架构师兰小伟,在会议上做了精彩分享。



本次 Meetup 设有茶歇、提问、抽奖等环节,为整个活动增添了更多的互动和乐趣。在茶歇环节,与会者们借此机会互相交流、分享心得;抽奖活动为现场气氛增添了一丝刺激与惊喜;问答环节让大家有机会深入了解自己感兴趣的话题,与专家面对面交流。

 回顾本次 Meetup,我们不仅感受到了科技的魅力,也加深了对技术发展趋势的认识。我们期待可以有更多这样的机会,共同探讨更多前沿科技话题,推动科技发展与创新。
回顾本次 Meetup,我们不仅感受到了科技的魅力,也加深了对技术发展趋势的认识。我们期待可以有更多这样的机会,共同探讨更多前沿科技话题,推动科技发展与创新。

无论是 Elastic 公司还是新智锦绣,都致力于为技术爱好者搭建更多的交流学习平台,推动科技进步。未来,让我们保持对技术的热忱,携手并进。
再次感谢各位的参与与支持!
敬请关注我们后续的活动,期待与您再次相遇!


