


1,401
社区成员
 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享近日,CCF泛在操作系统开放社区发布《具身智能操作系统技术白皮书》。白皮书从当前具身智能产业的发展现状出发,系统梳理并分析了当前具身智能软件系统开发中的若干问题,提出了一种面向具身智能的新型操作系统设计,旨在以操作系统范式重构具身智能的工程基础,并为构建大规模、可持续的具身智能产业生态提供支撑。
白皮书摘要
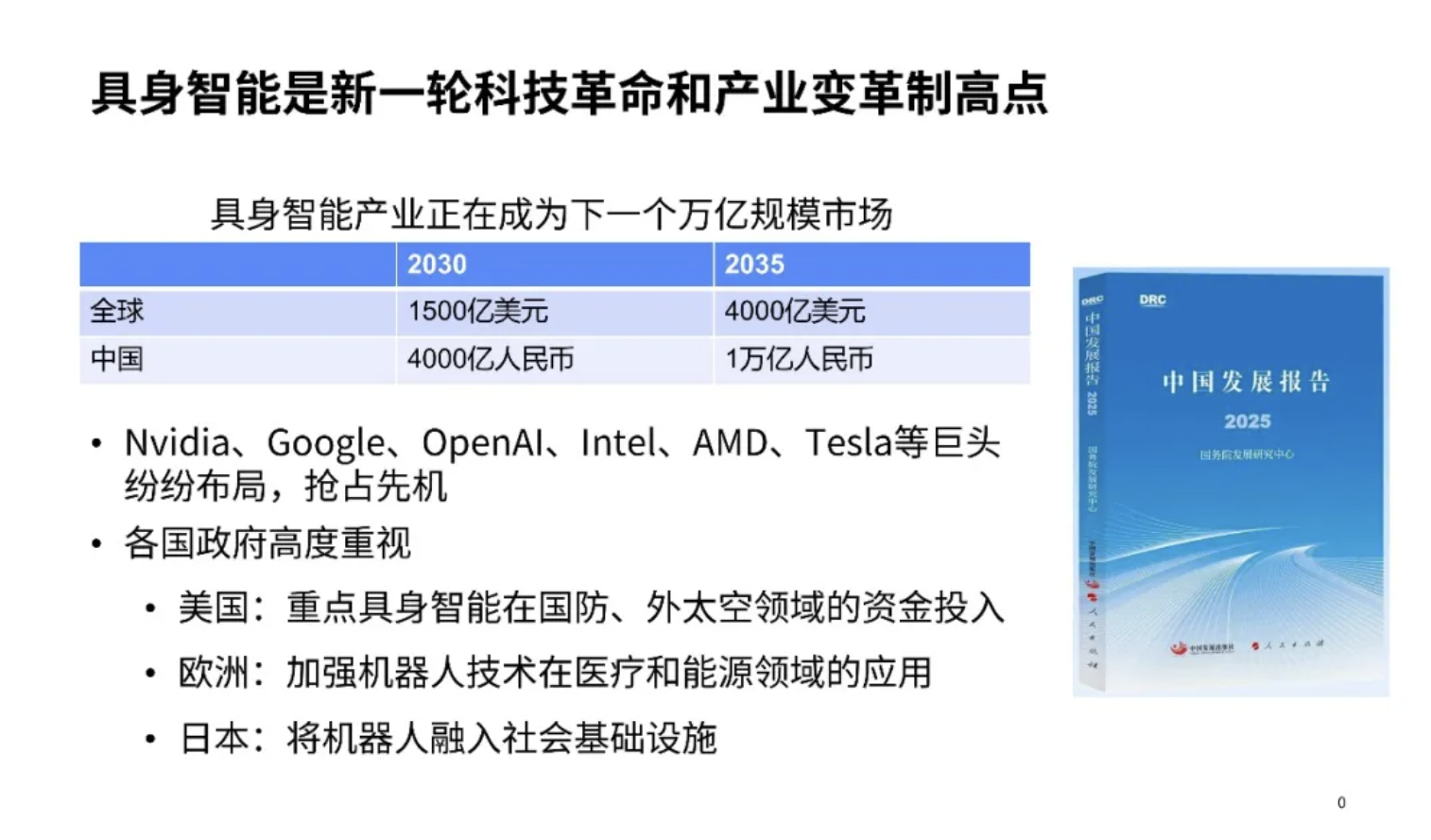
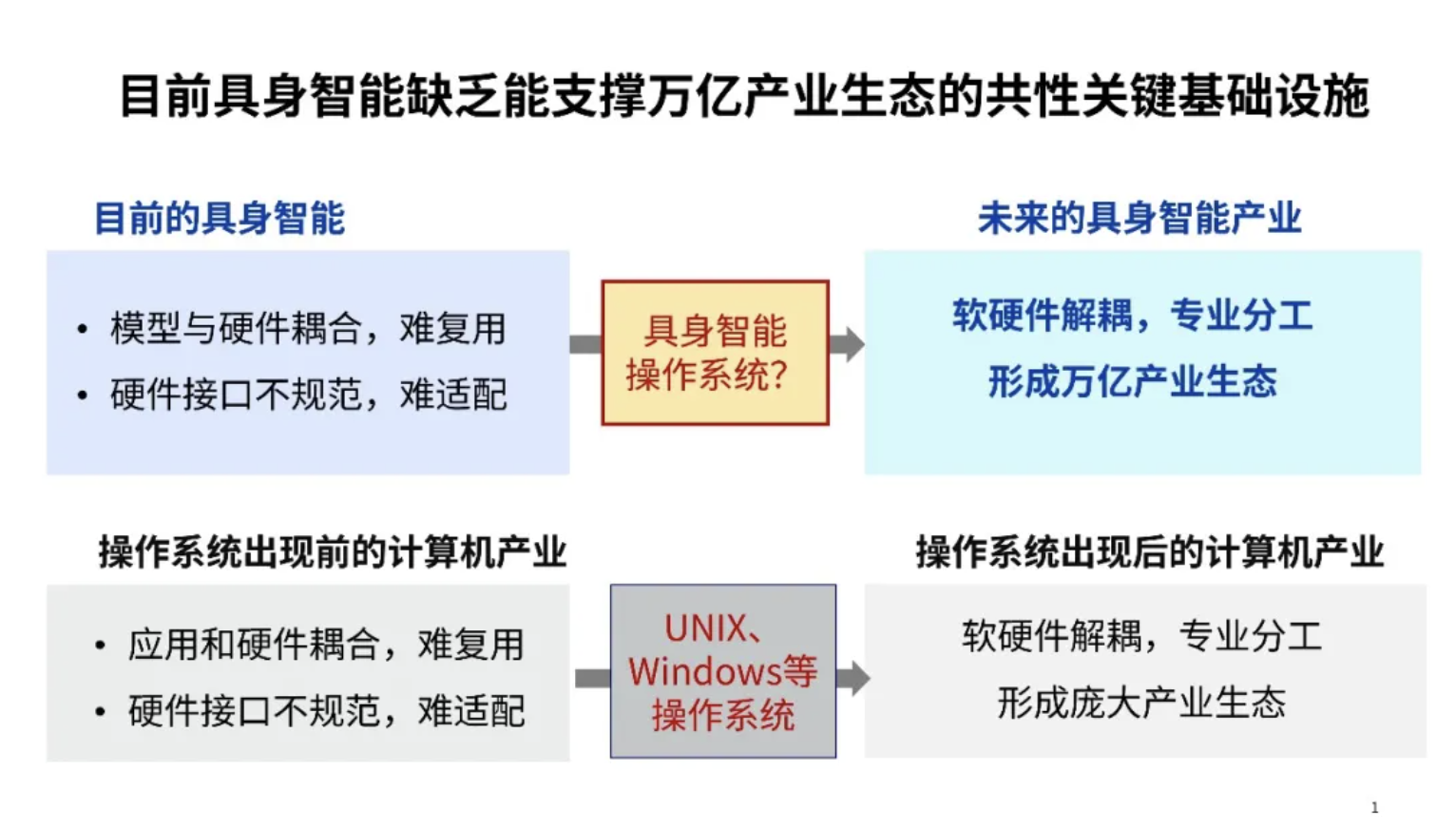
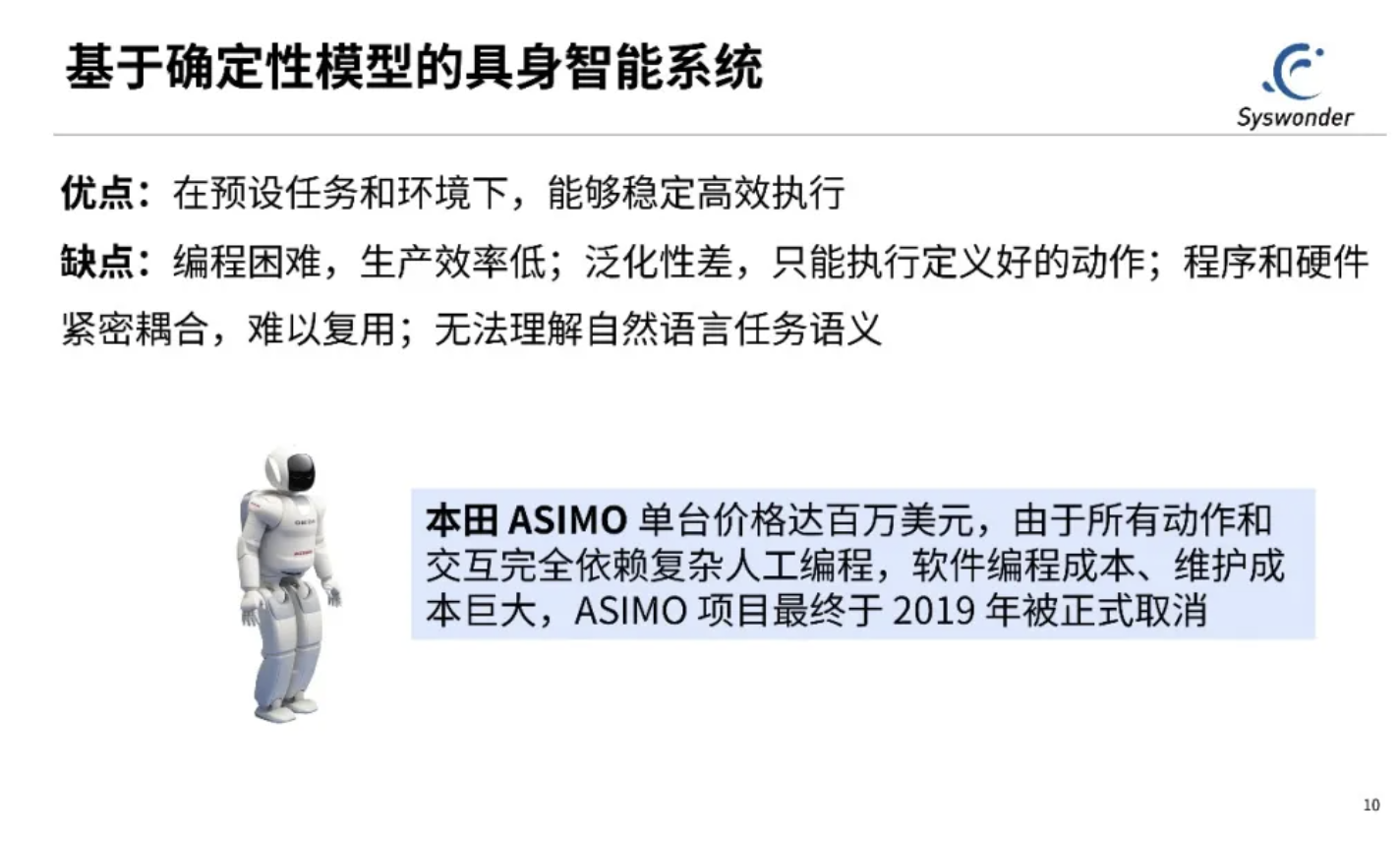
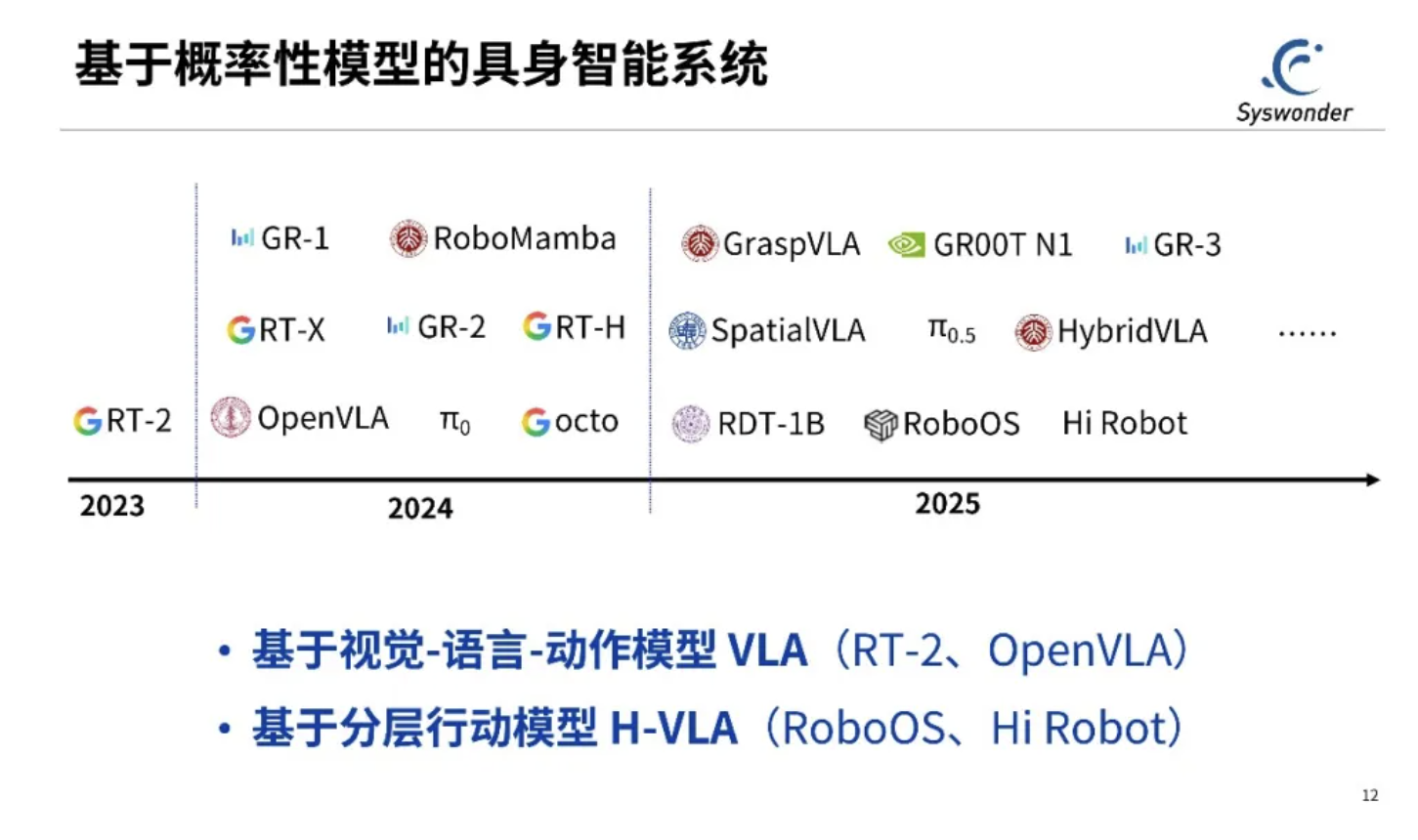
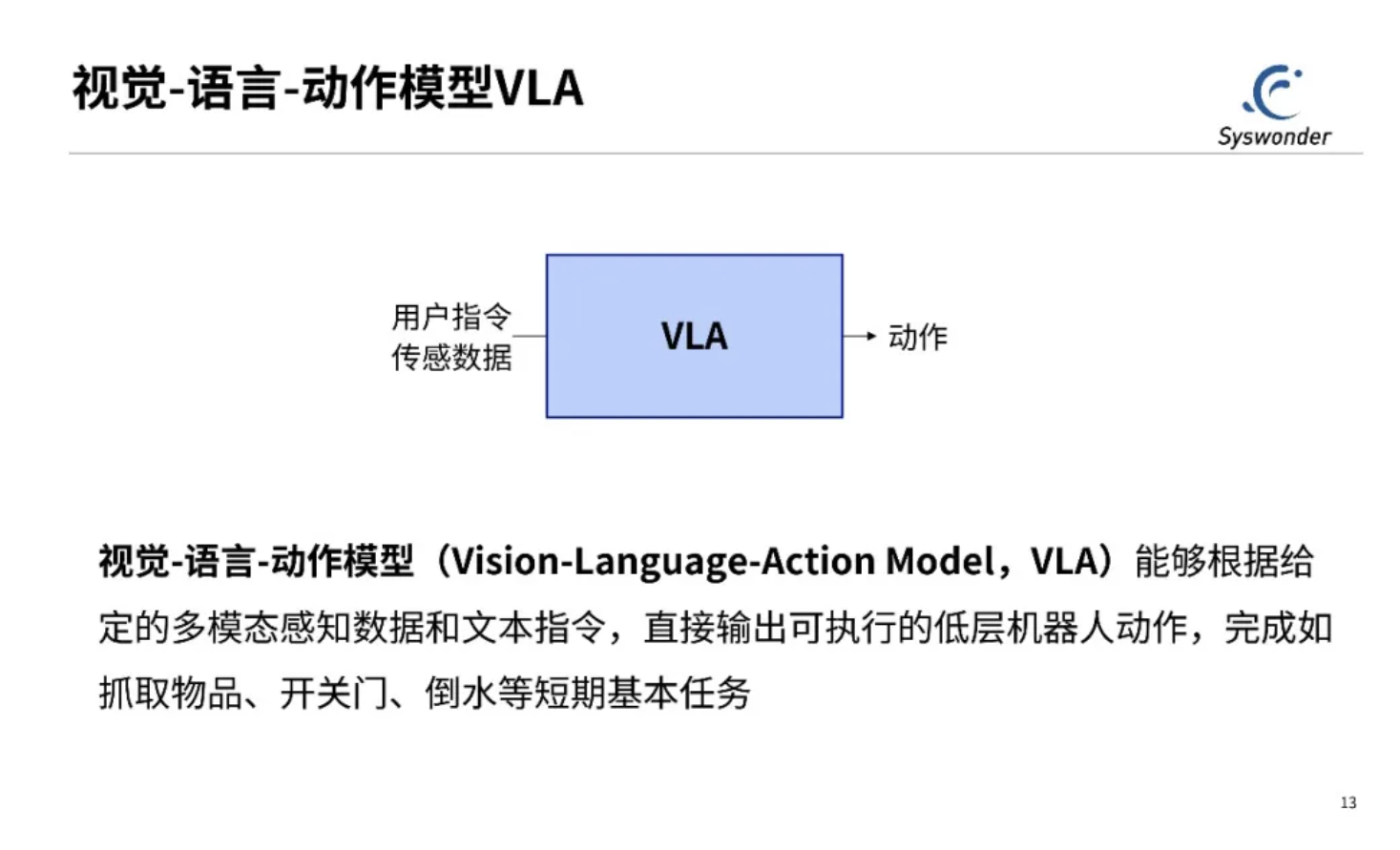
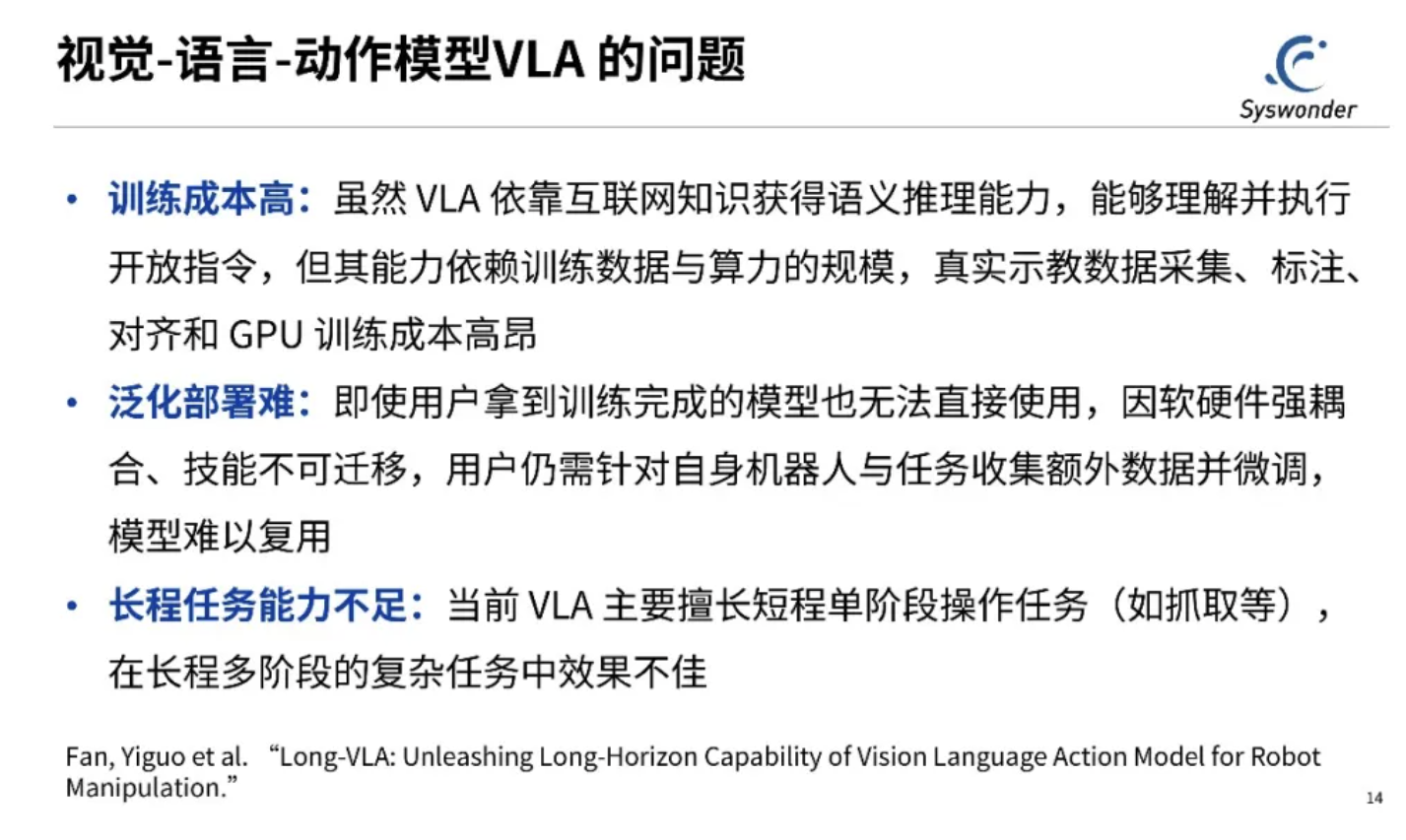
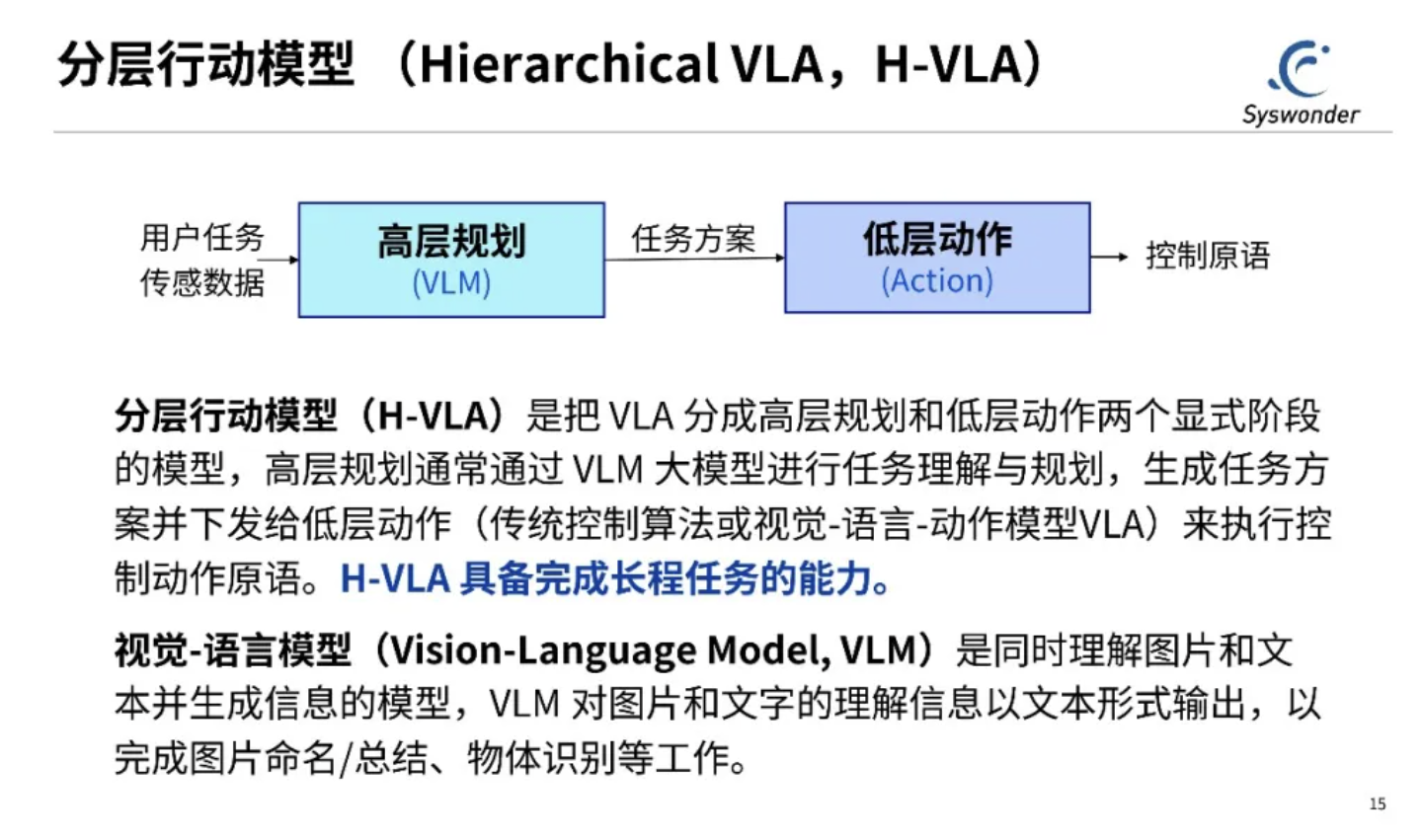
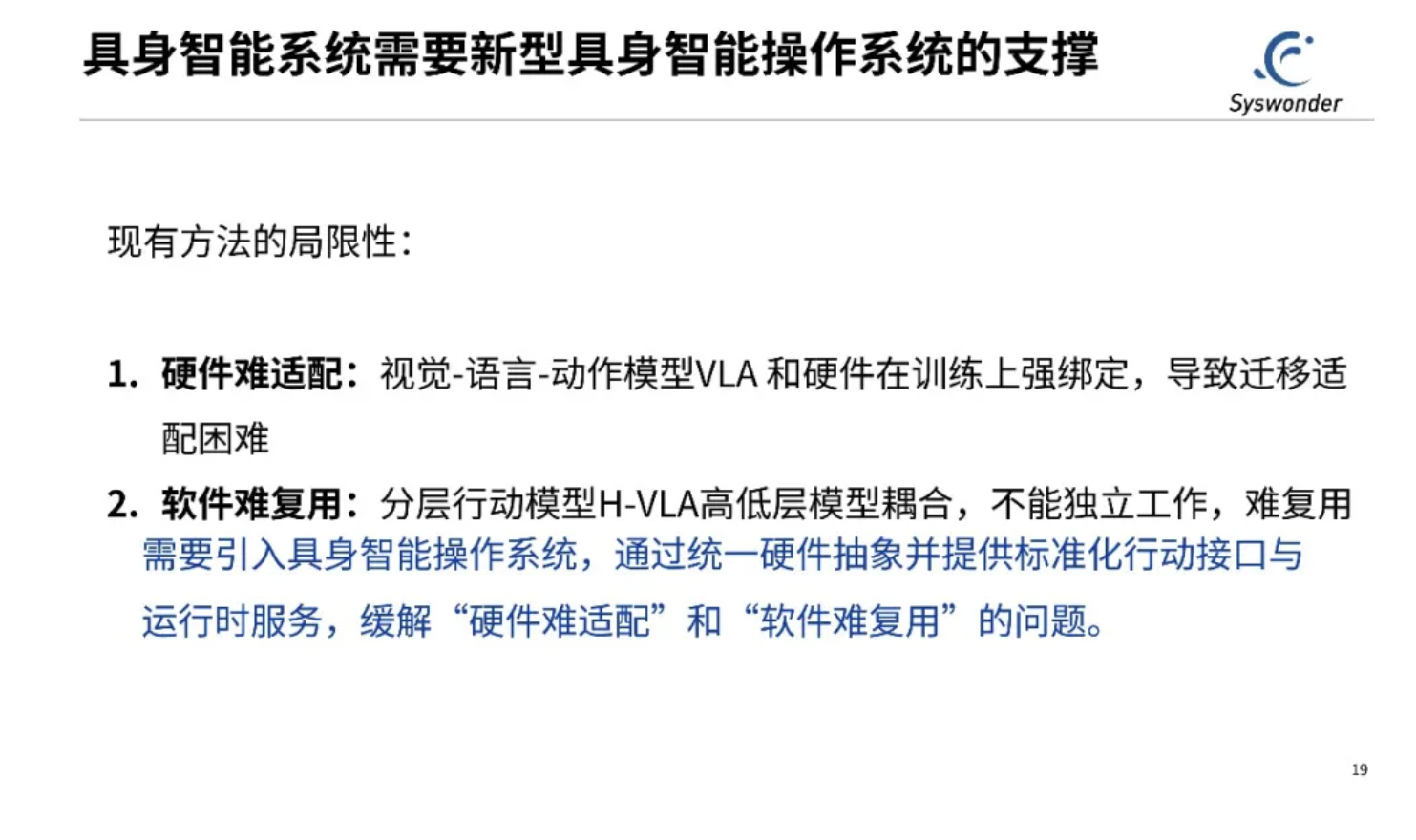
具身智能正处于快速发展阶段,随着VLA(视觉-语言-动作)大模型等关键技术的突破,机器人的通用感知、规划决策与行动执行等能力显著提升,应用前景极为广阔,具身智能有望成为万亿级规模产业。然而,目前让具身智能机器人稳定、高效地执行真实任务、掌握所需技能,仍然高度依赖大量专业化、定制化的工程开发,效率低下,成本高昂。其根本原因在于当前具身智能的软件算法模型与硬件物理本体之间存在高度紧耦合关系,导致“硬件难适配、软件难复用”。
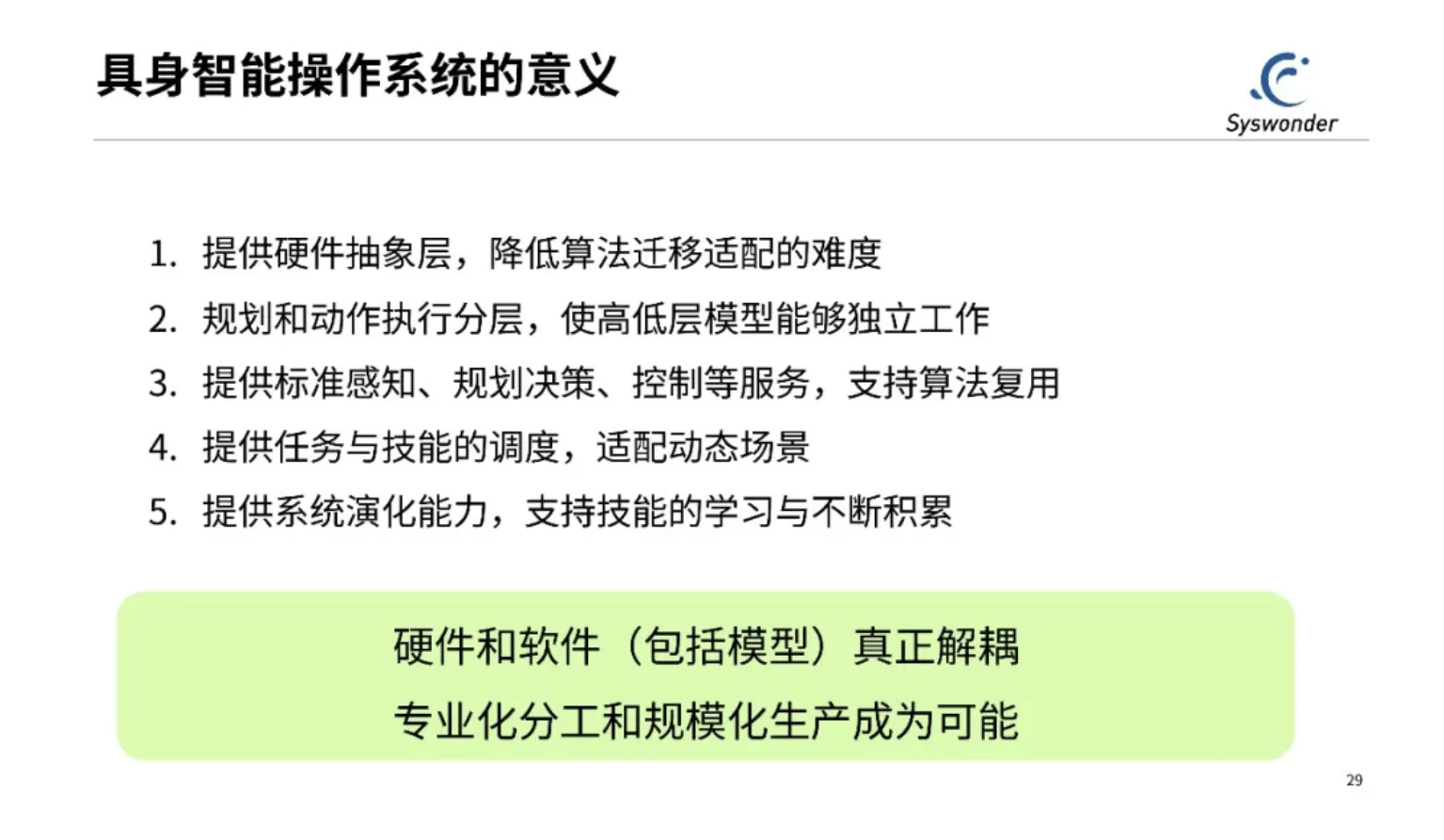
具身智能产业要迈向万亿级规模,必然需要类似于通用操作系统之于计算机产业那样的共性基础设施,将机器人硬件与软件解耦,支撑生态化分工、跨平台复用与规模化应用。
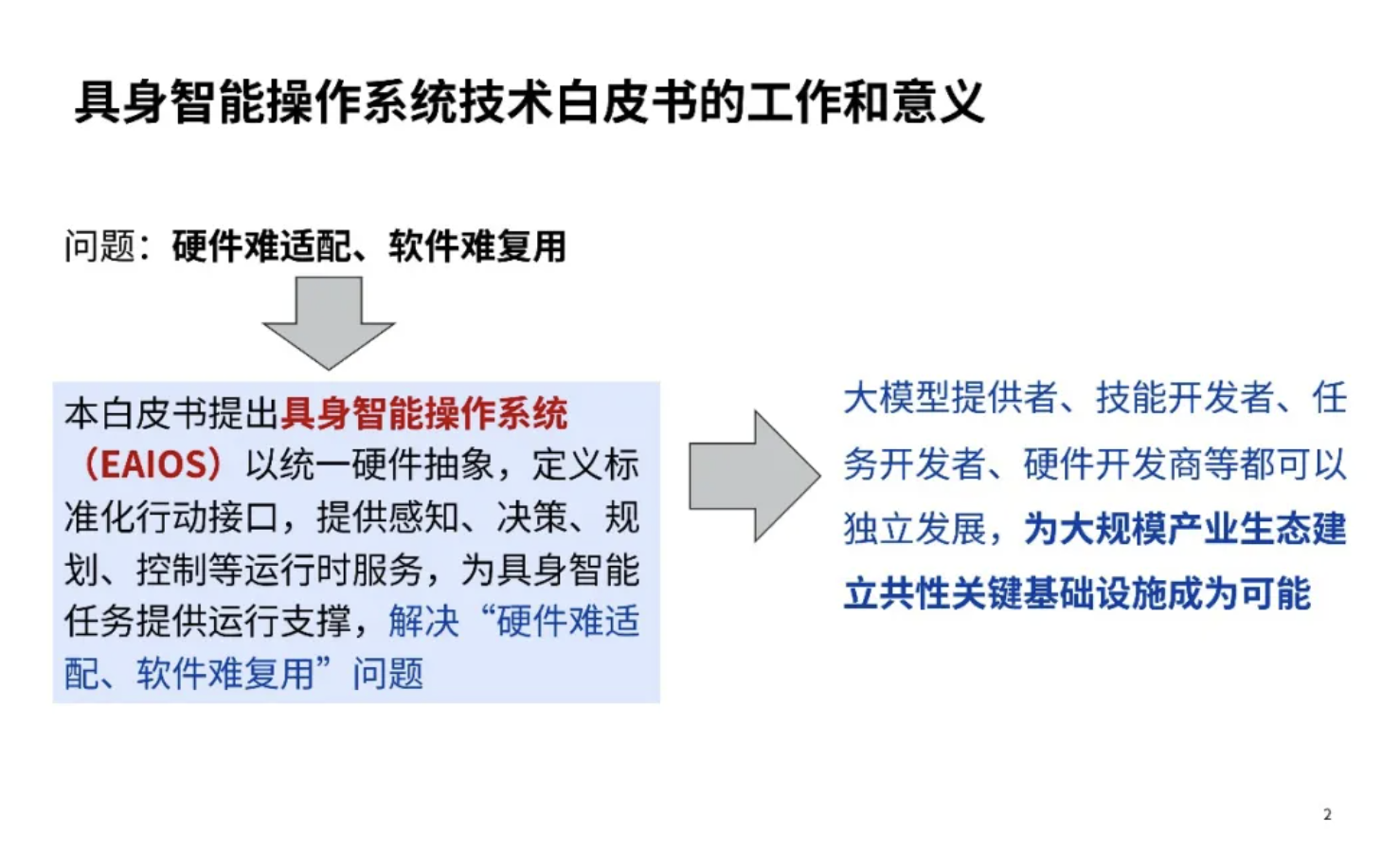
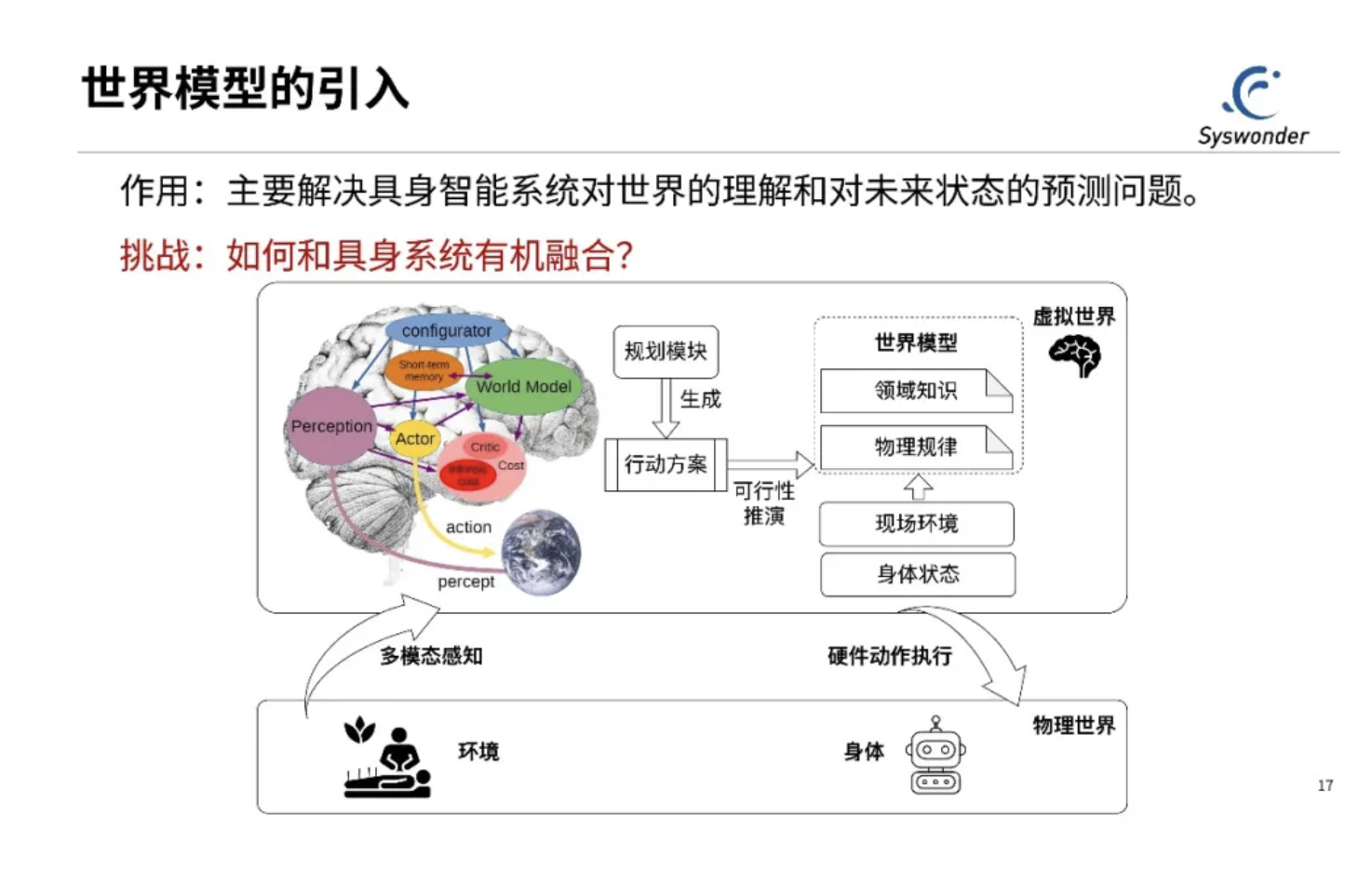
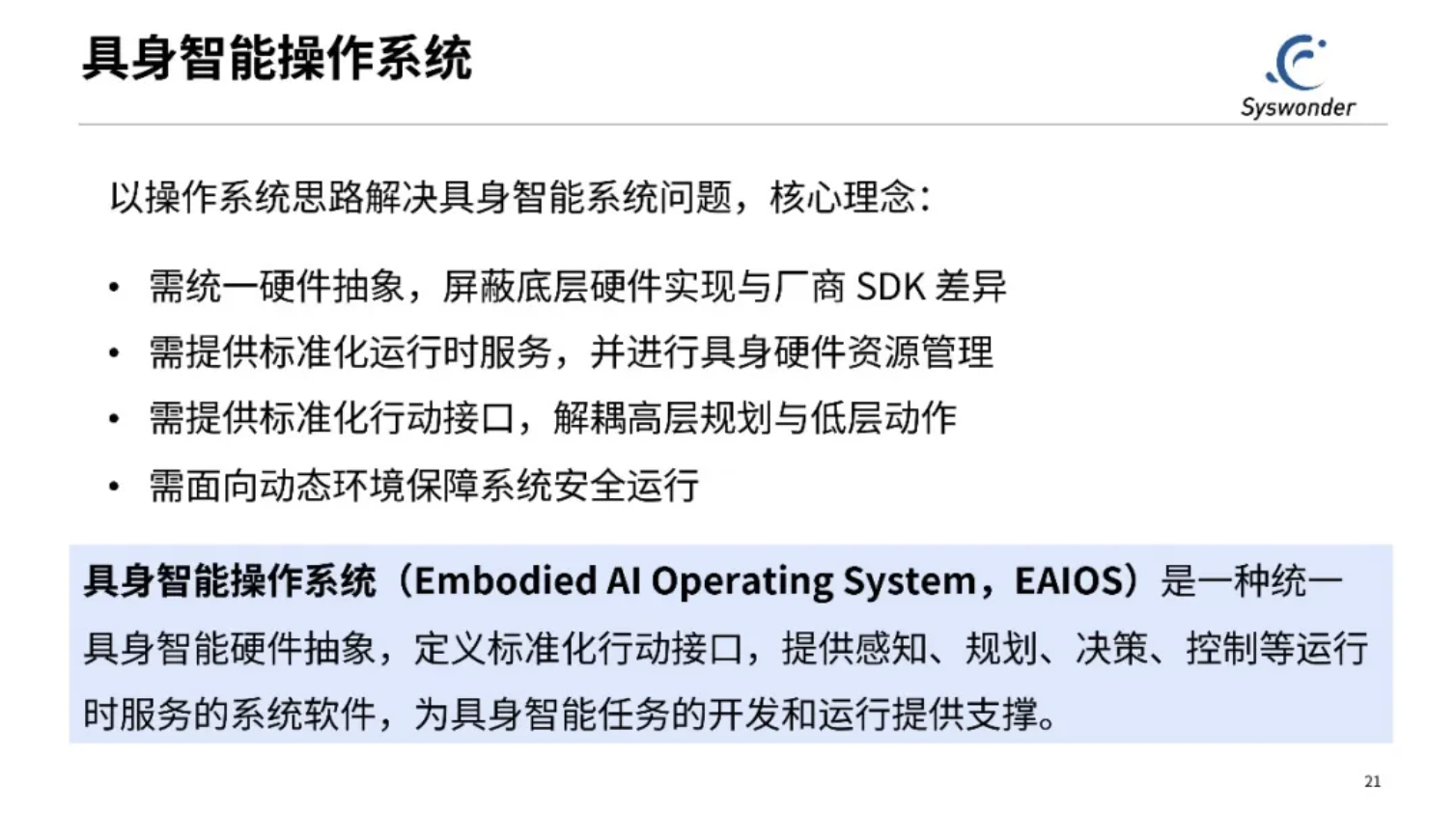
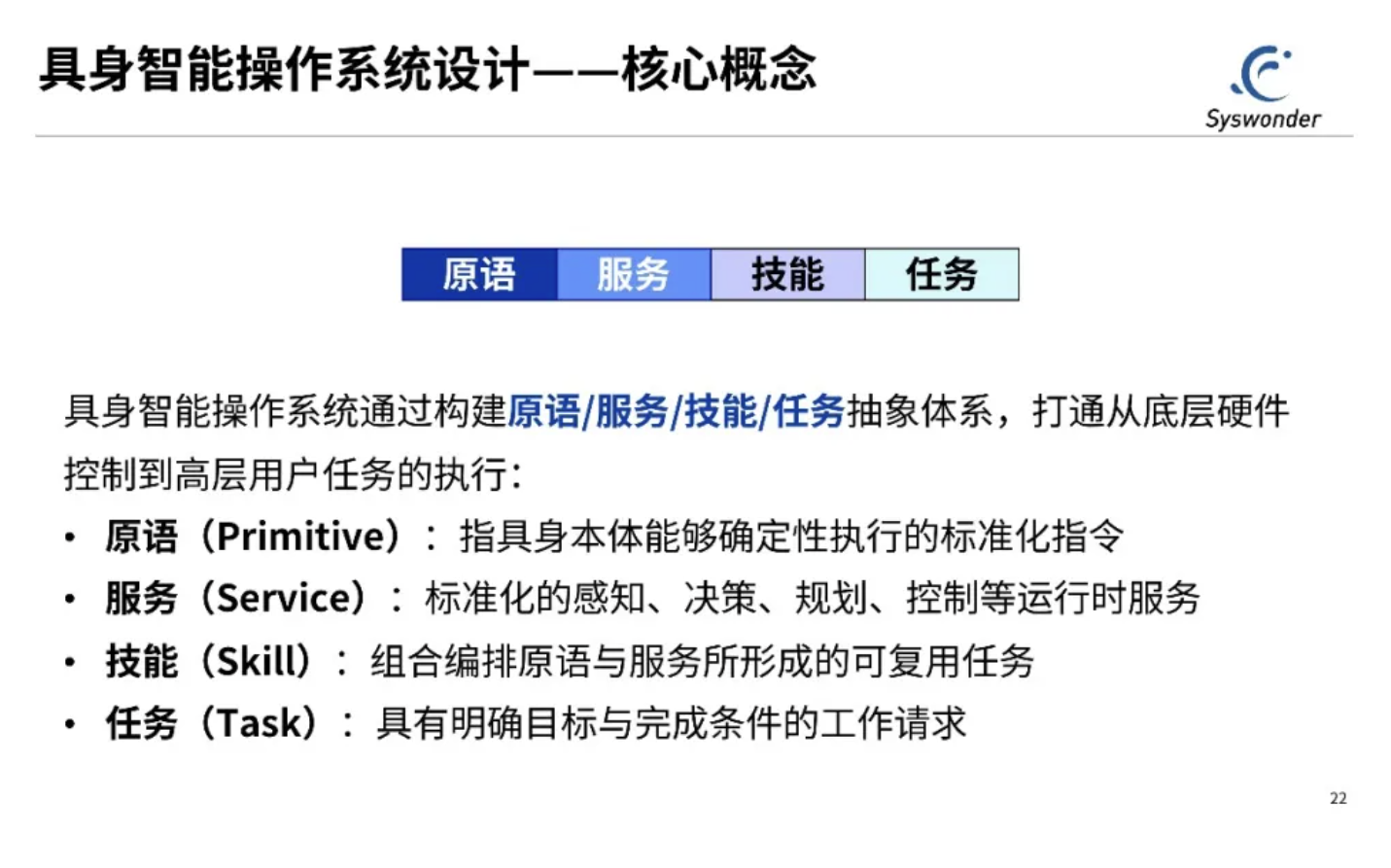
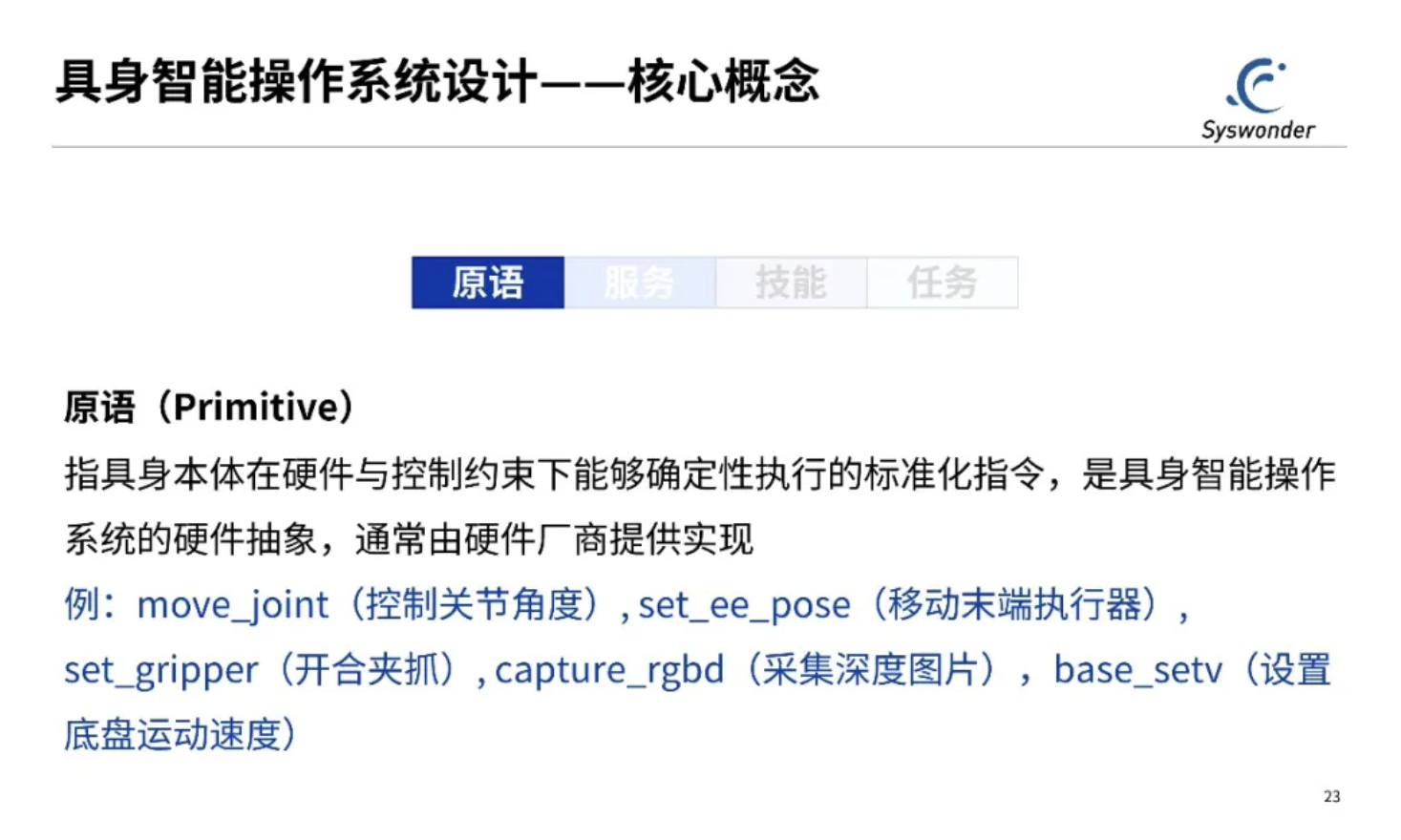
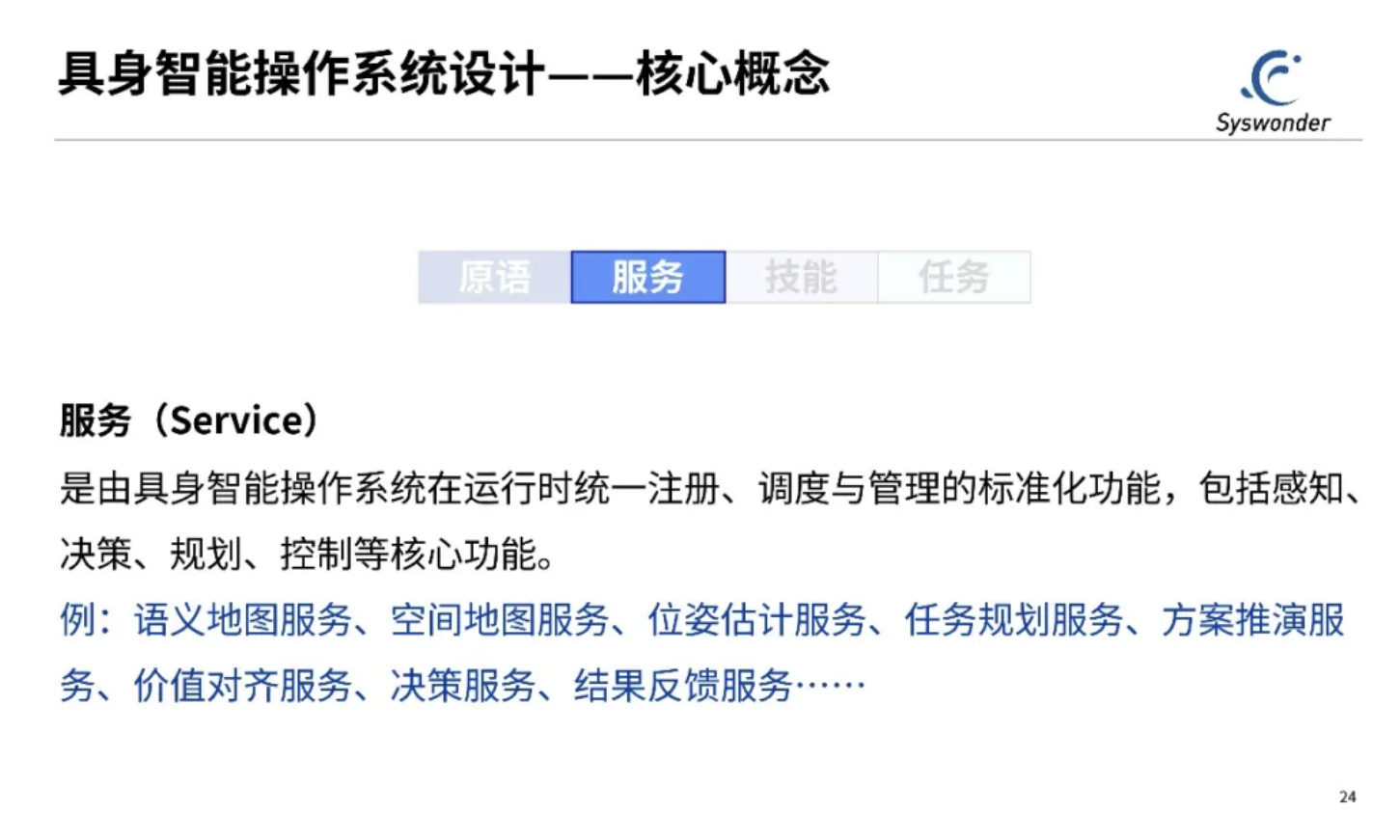
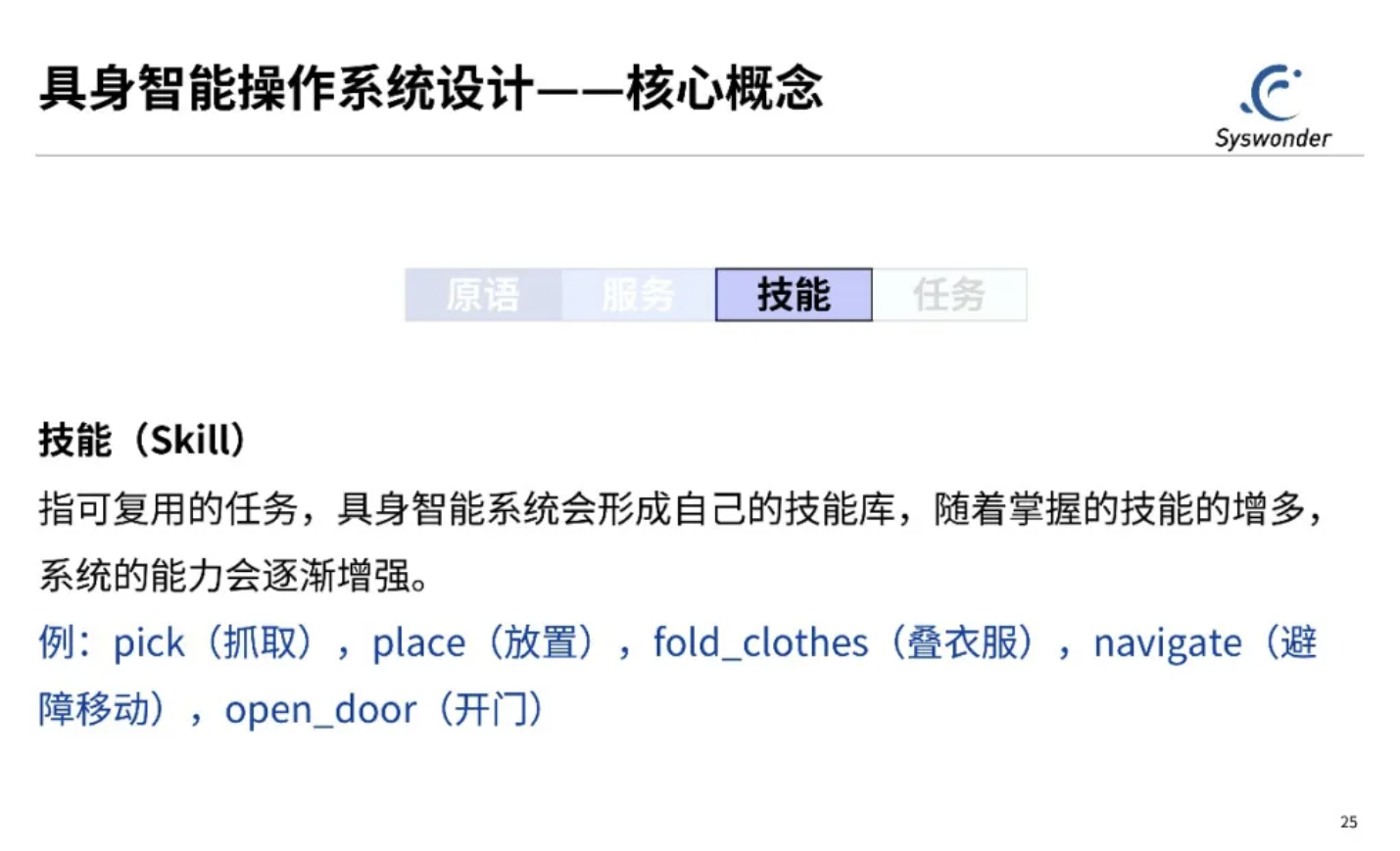
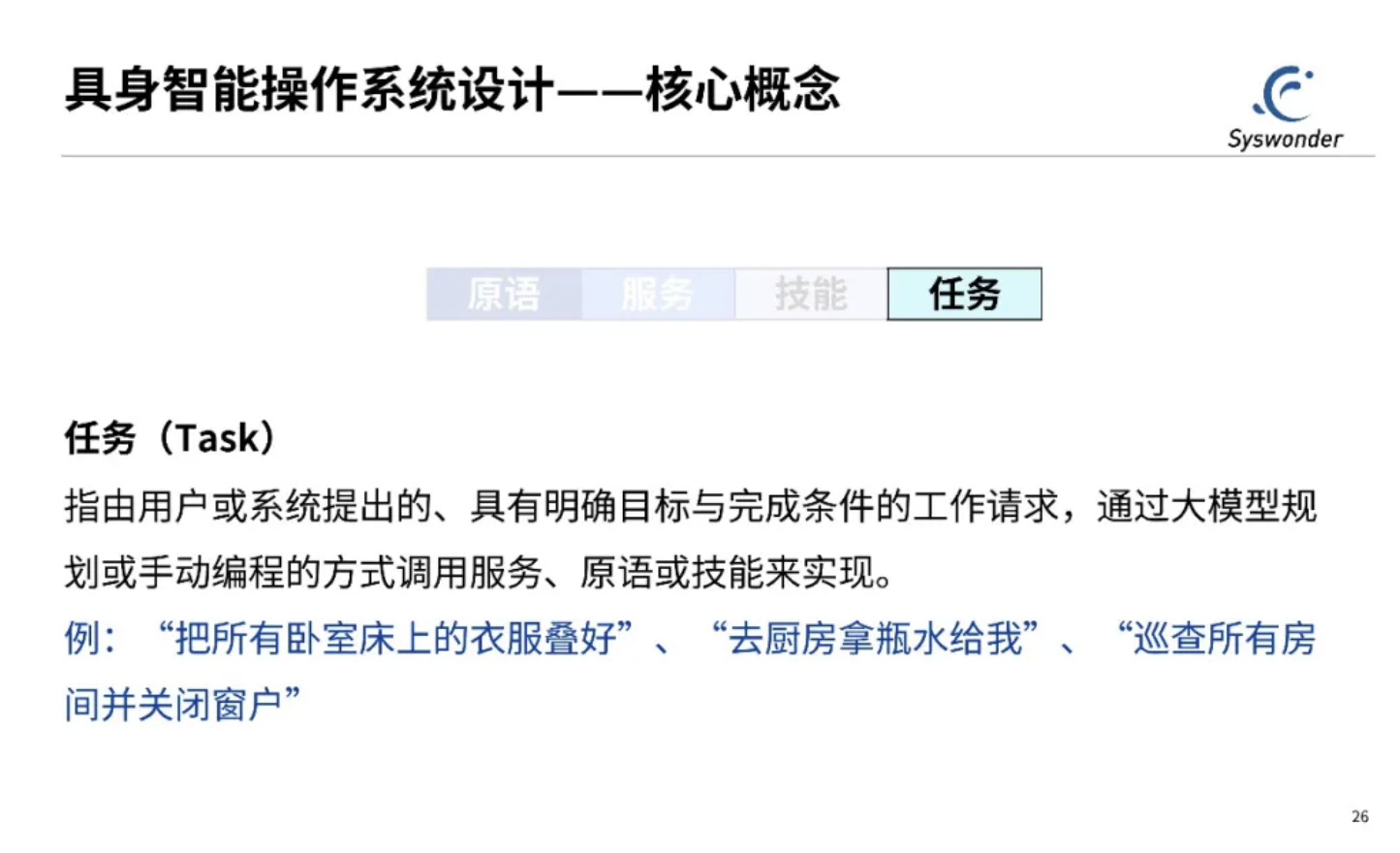
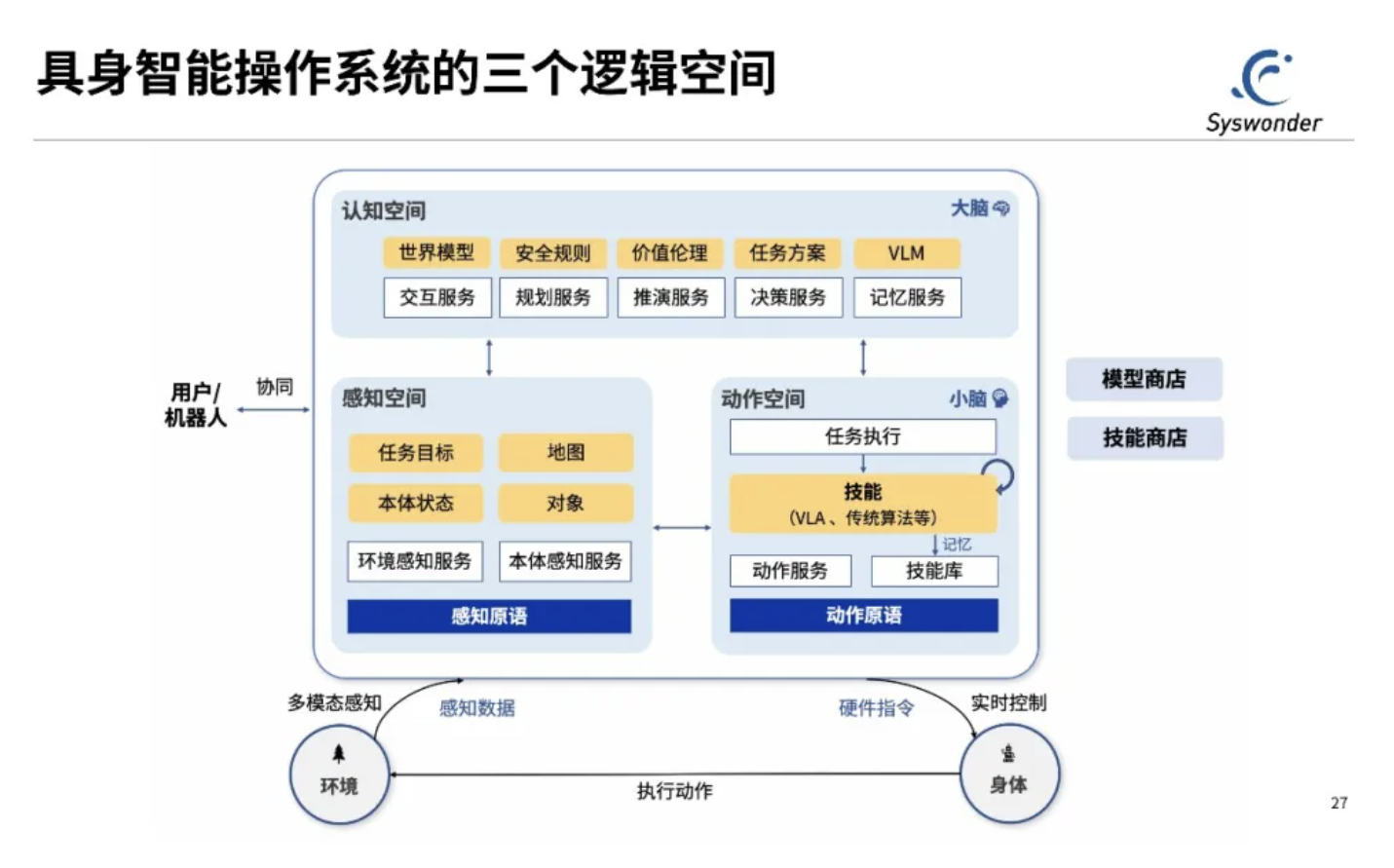
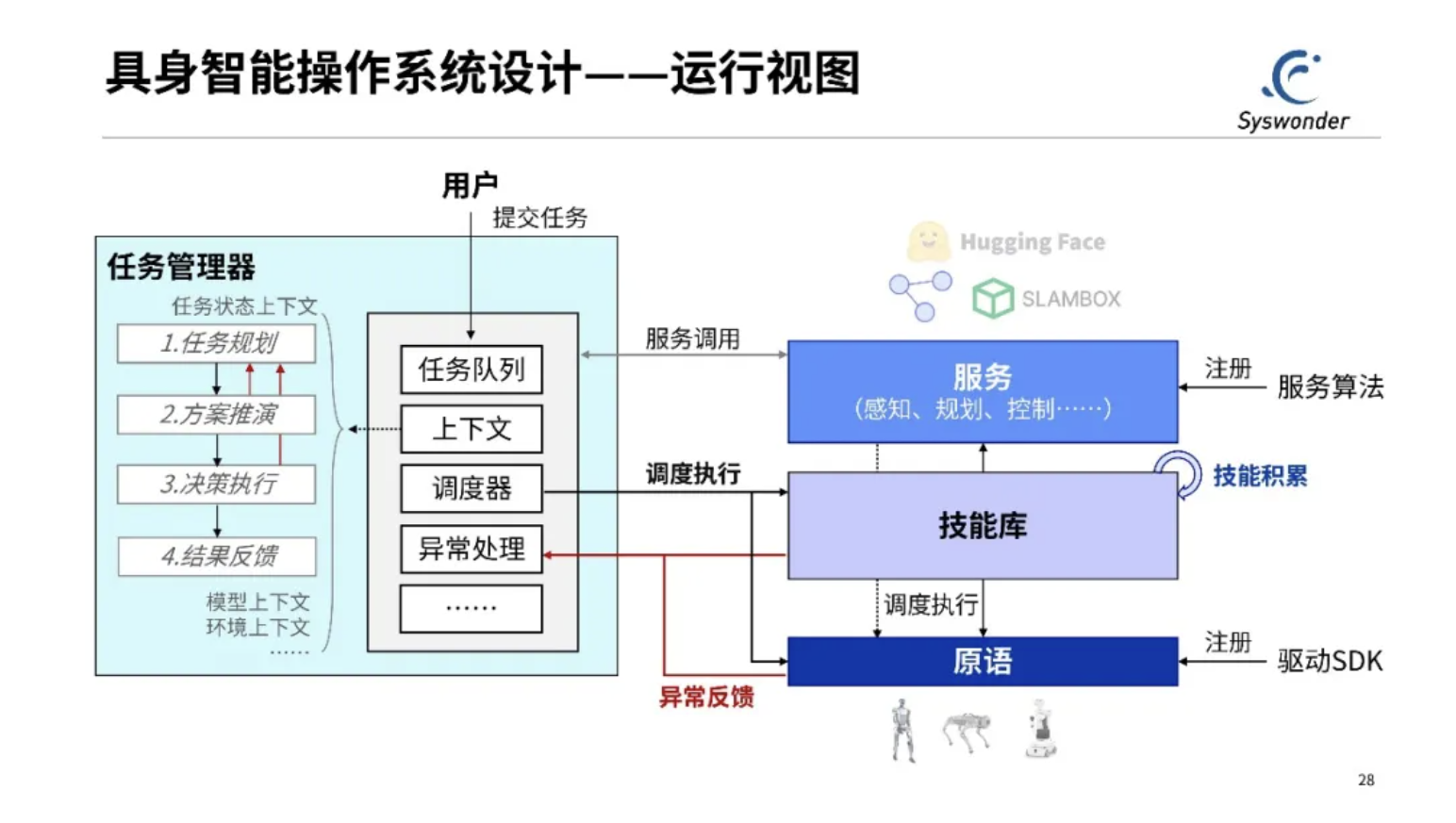
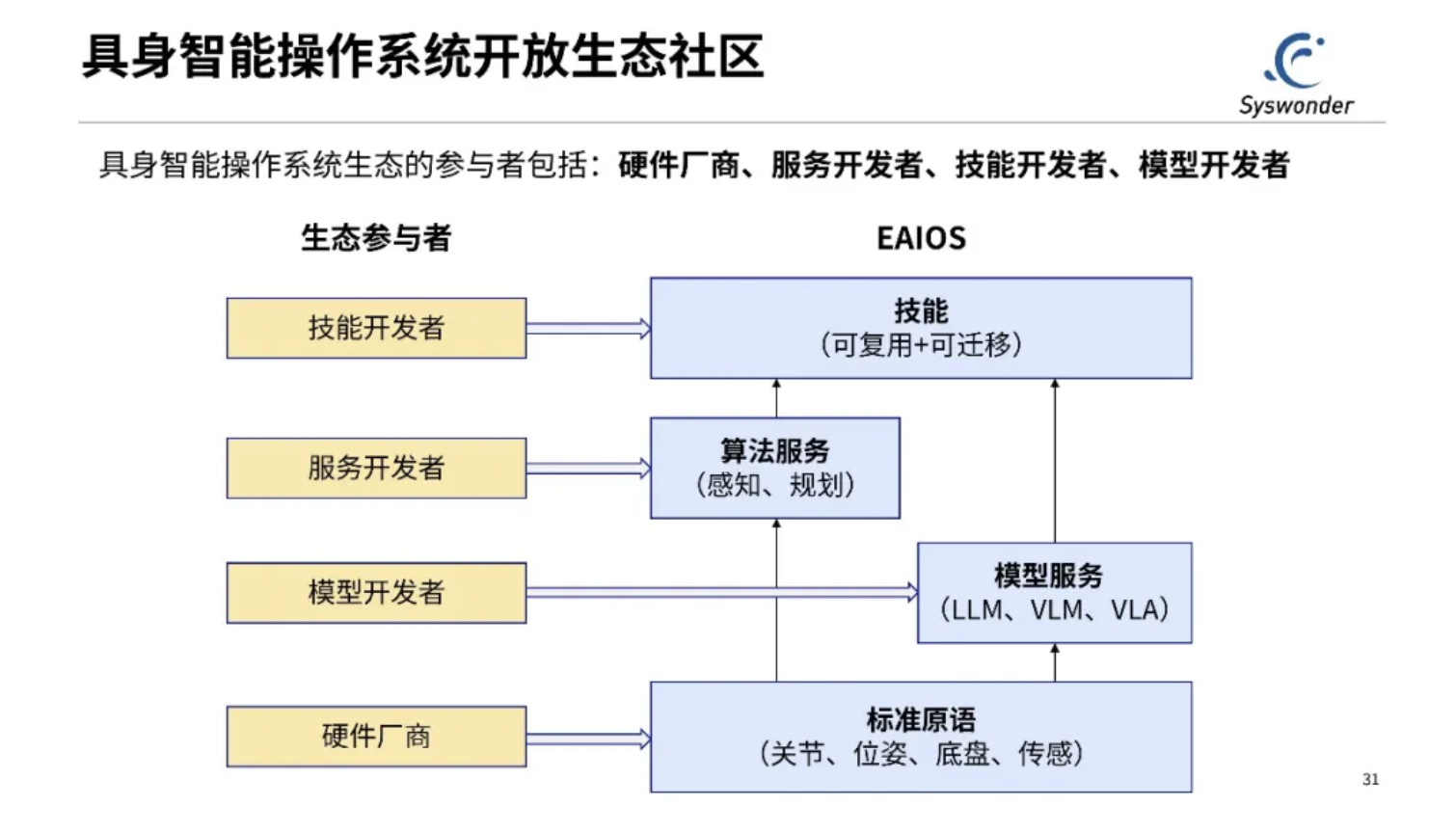
白皮书提出一种面向具身智能的新型操作系统设计——EAIOS(Embodied AI Operating System),试图以操作系统范式重构具身智能的工程基础。EAIOS 采用“原语–服务–技能–任务”对机器人的行动进行抽象,采用“对象”为基本单元构建映像外部世界的虚拟表征空间,引入世界模型(World Model)与安全内核作为核心运行时支撑,自底向上统一异构硬件抽象,并向上提供标准化的行动接口。
在执行层面, EAIOS 通过世界模型对大模型生成的规划与行为进行推演与验证,在物理执行前确保其满足安全约束与价值伦理要求,提升系统的可靠性与可控性。这种设计有效实现了具身智能中“身体”(硬件系统)与“大脑”(模型与软件系统)的解耦,使大模型提供者、技能开发者与硬件开发商能够独立分工发展,为构建大规模、可持续的具身智能产业生态提供基础支撑。白皮书将系统性阐述EAIOS 的整体架构、关键设计理念与接口规范。相关参考实现 Robonix 将以开源形式发布。
白皮书目录
一、引言
(1)具身智能有望形成新的万亿产业
(2)目前具身智能缺乏能支撑万亿产业生态的共性关键基础设施
(3)白皮书的工作与意义
二、具身智能系统技术现状
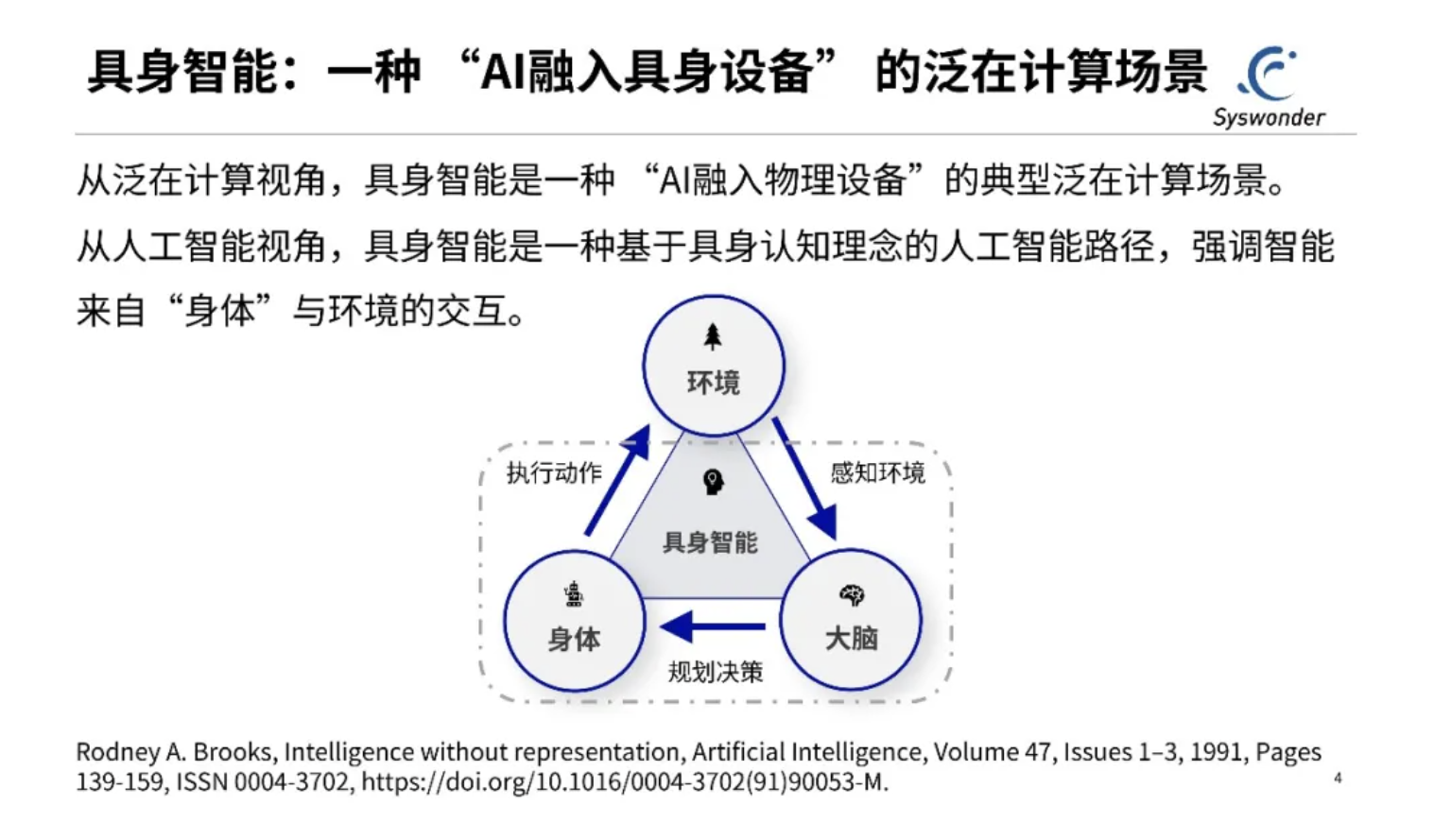
(1)具身智能的定义与范式
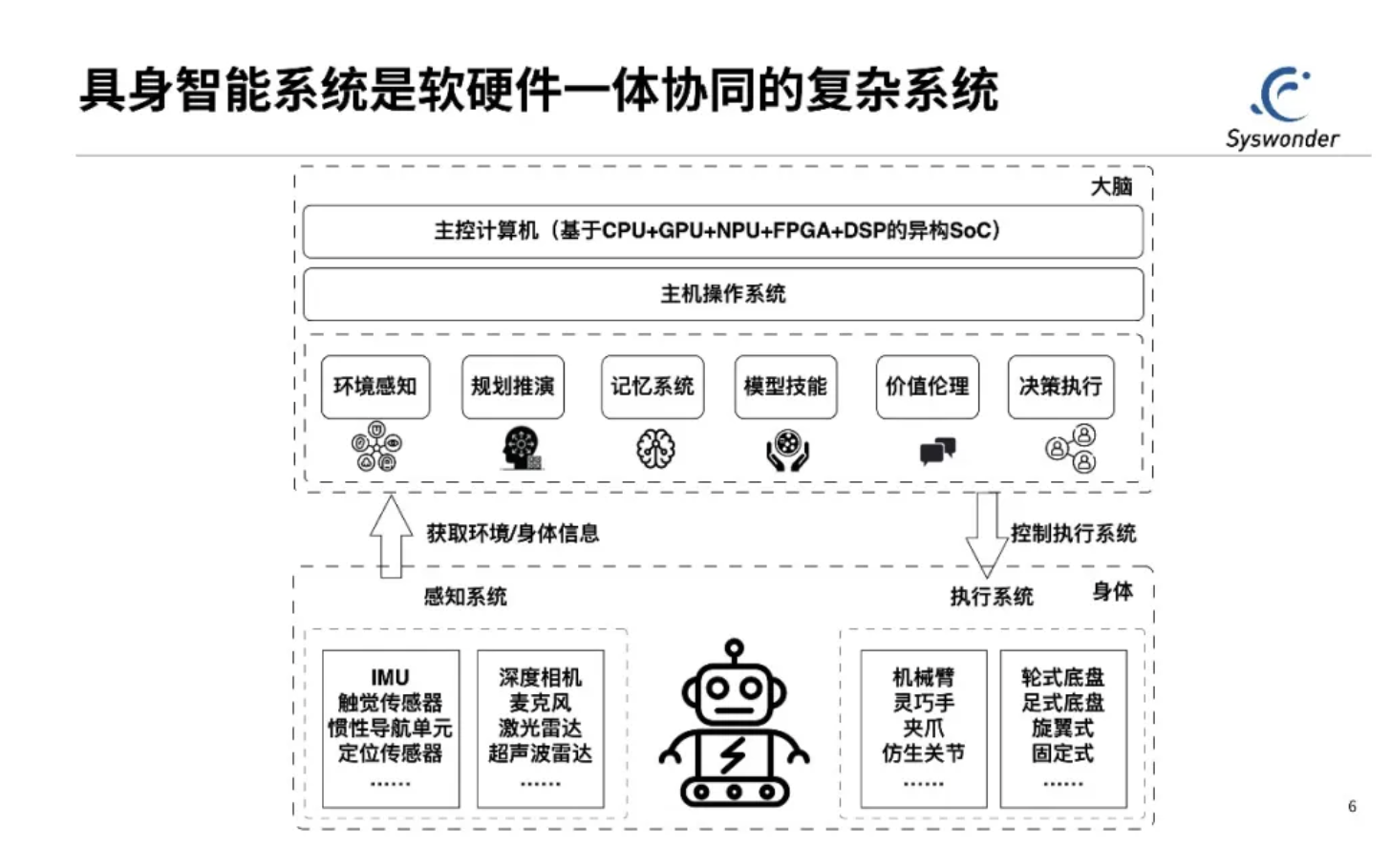
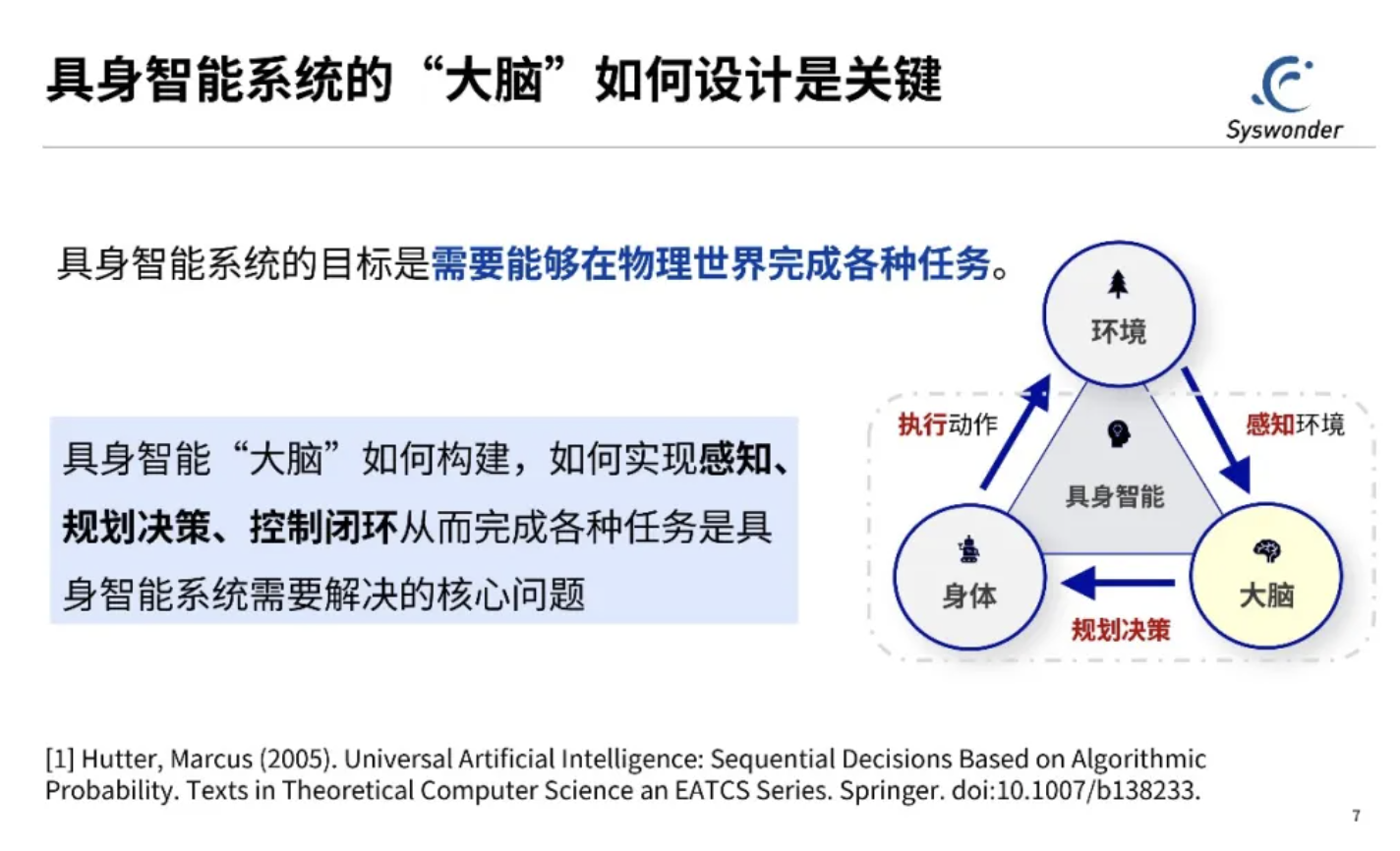
(2)具身智能系统
(3)具身智能软件系统的实现路径
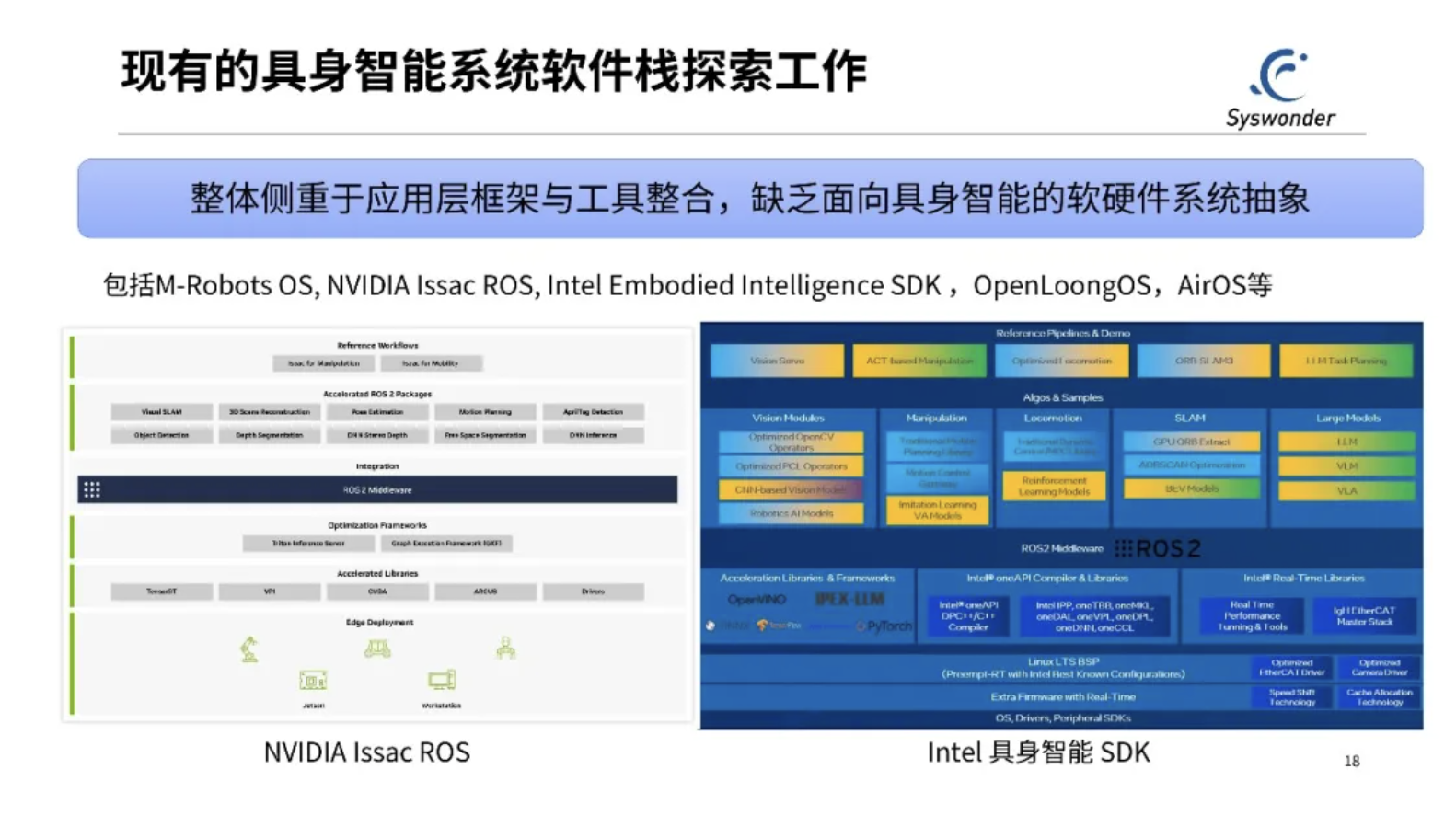
(4)具身智能软件系统现状
(5)具身智能系统对新型操作系统的迫切需求
三、具身智能操作系统的架构设计
(1)设计目标与核心定义
(2)核心概念与抽象体系
(3)感知空间:环境与本体的数字化重构
(4)认知空间
(5)动作空间
(6)具身模型与EAIOS 抽象概念的关系
(7)支持现场实时智能计算的安全内核
(8)运行视图
(9)案例:基于厂商VLA 模型的“室内巡检”
(10)案例:基于标准原语的“室内巡检”
四、新型具身智能计算硬件
(1)现有计算硬件的局限
(2)下一代具身智能计算硬件:原则、参考架构与接口
(3)基于虚拟机监控器的具身智能软硬件协同架构
五、测试与验证
(1)系统基本能力测试
(2)运行时行为与故障场景测试
(3)回归测试与基准用例集
六、开放生态与社区
七、典型应用场景
(1)酒店服务机器人
(2)巡检机器人(楼宇/园区/工厂)
(3)物流机器人(仓内搬运/转运)
(4)智能工业机器人(装配/协同/复杂工艺)
(5)移动操作机器人
(6)护理机器人(养老/助残/康复)
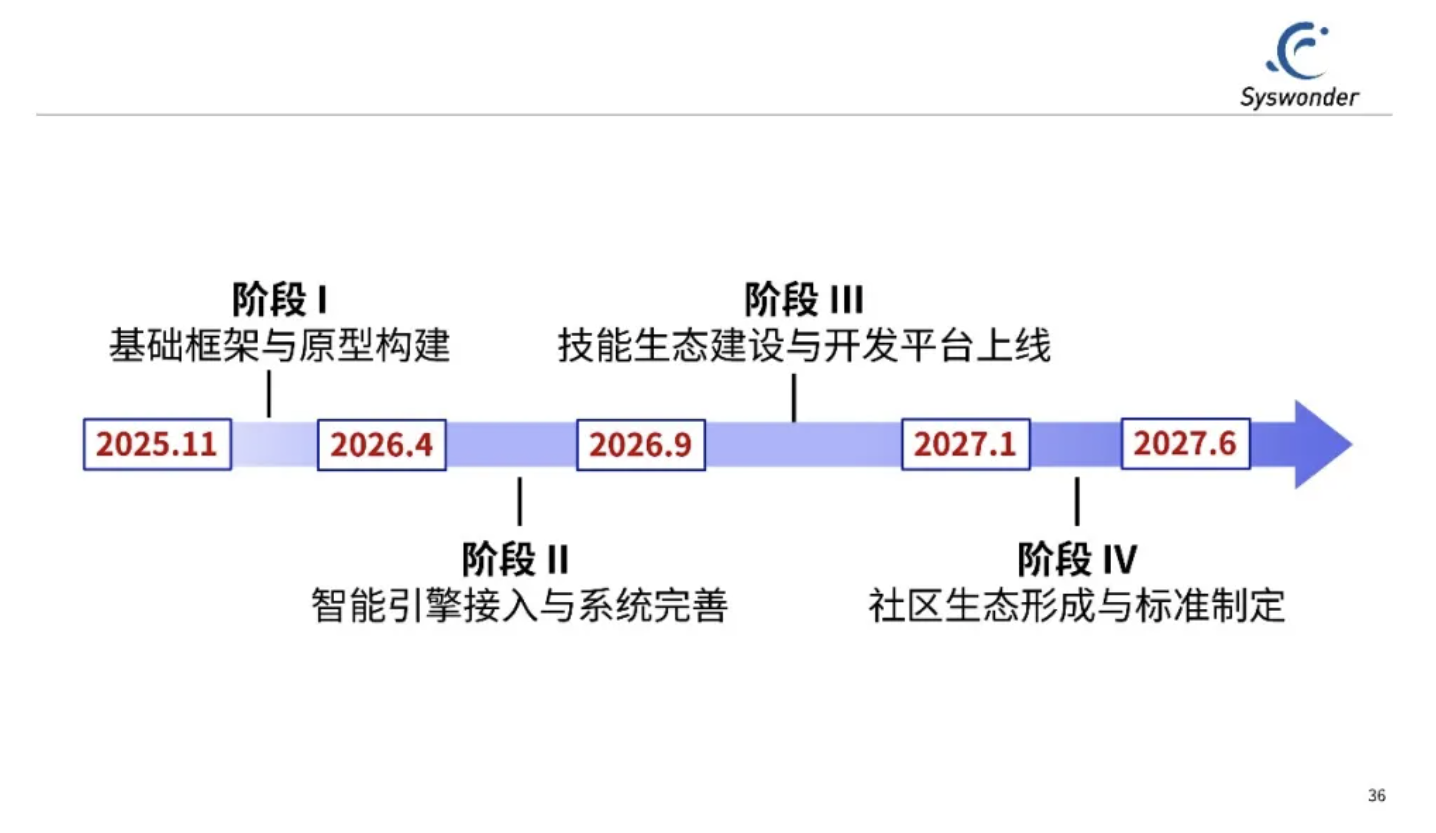
八、路线图
九、附录
(1)名词解释
(2)系统接口总览
十、致谢
下面是白皮书的一些要点,更多详细内容请获取原文阅读。







本文来源/资源获取:
《具身智能操作系统白皮书》由 CCF 泛在操作系统开放社区技术委员会指导,矽望开源社区组织编写完成。
白皮书v0.1版及更多资料,可访问矽望开源社区网站 syswonder.org 获取。


