opencv initundistortrectifymap()函数,为什么是在相机坐标系下去畸变
 一棹烟波 2016-11-24 11:16:40
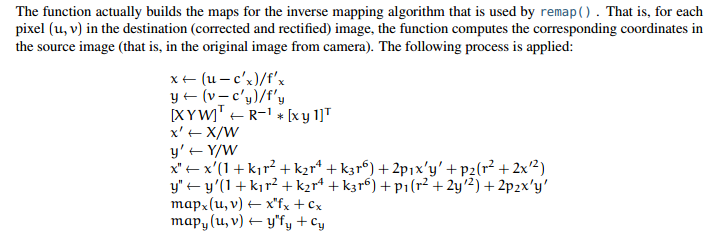
一棹烟波 2016-11-24 11:16:40 最近在看张正友标定和畸变校正的的Opencv源代码, 求出畸变系数后利用initundistortrectifymap()函数和remap()函数进行畸变校正。但是有一点不明白的就是,在initundistortrectifymap()函数中,是先将图像坐标(u, v)转换摄像机坐标系,再到世界坐标(X, Y, Z),然后在转换到摄像机坐标系(x', y', 1),在摄像机坐标系中利用畸变校正模型得到去畸变后的坐标(x'', y'', 1),然后再转换到图像坐标系(u', v'),这是什么原理呢?求大神指导,如果能够详细的解释整个过程,更是感激不尽!!


 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享
 看了半天被绕晕了
看了半天被绕晕了







 undistort是我说的两个函数的组合,大侠有兴趣了互相探讨一下。[/quote]
2625812497 这是我扣扣号,,不过,我是用的比较多,,,原理什么的弄明白的少
undistort是我说的两个函数的组合,大侠有兴趣了互相探讨一下。[/quote]
2625812497 这是我扣扣号,,不过,我是用的比较多,,,原理什么的弄明白的少