请问大家有没有做过GPS的项目?
自己在测试接收到的一帧GPS数据是否正确时,始终检查不到帧头,不知道怎么回事?不知道是不是自己程序逻辑有问题。
采用的是串口中断接收数据,是将接收到的数据放到接受缓存器U2RBR里面的,读GPS的时候就是读的U2RBR的内容,GPS的协议是标准的NMEA0813协议,我用串口发一帧数据如$BDRMC,133413.00,A,4717.13981,N,00833.86256,E,2.584,151.37,190203,,,A*6A
单片机用的是LPC1768,采用的ucosii系统,之前自己想的是在串口接受中断触发后,就发一个信号量给一个任务,让这个任务读GPS和处理GPS。而且中断里面发信号量要死机。在测试的时候是不是也不能在一帧数据的中间打断点测试??代码不好看就发图片的哦
****读取Gps通信任务如下*************************************************************************************************
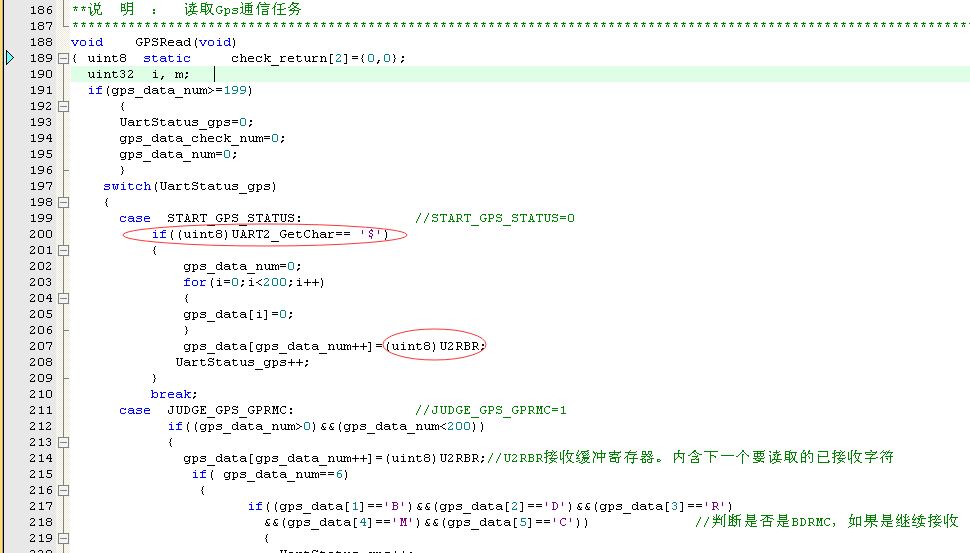
void GPSRead(void)
{
uint8 static check_return[2]={0,0};
uint32 i, m;
if(gps_data_num>=199)
{
UartStatus_gps=0;
gps_data_check_num=0;
gps_data_num=0;
}
switch(UartStatus_gps)
{
case START_GPS_STATUS: //START_GPS_STATUS=0
if((uint8)UART2_GetChar== '$')
{
gps_data_num=0;
for(i=0;i<200;i++)
{
gps_data[i]=0;
}
gps_data[gps_data_num++]=(uint8)U2RBR;
UartStatus_gps++;
}
break;
case JUDGE_GPS_GPRMC: //JUDGE_GPS_GPRMC=1
if((gps_data_num>0)&&(gps_data_num<200))
{
gps_data[gps_data_num++]=(uint8)U2RBR;//U2RBR接收缓冲寄存器。内含下一个要读取的已接收字符
if( gps_data_num==6)
{
if((gps_data[1]=='B')&&(gps_data[2]=='D')&&(gps_data[3]=='R')
&&(gps_data[4]=='M')&&(gps_data[5]=='C')) //判断是否是BDRMC,如果是继续接收 {
UartStatus_gps++;
}
else
{
UartStatus_gps=0;
gps_data_num=0;
}
}
}
else
{
UartStatus_gps=0;
gps_data_num=0;
}
break;
串口2接受函数如下:
int UART2_GetChar (void)
{
while (!(U2LSR & 0x01)); /*读bit0 0为空,1为接收到数据 */
return (U2RBR); /*读取接收数据 接收缓冲寄存器,内含下一个要读取的已接收字符*/
}
串口接受中断函数如下:
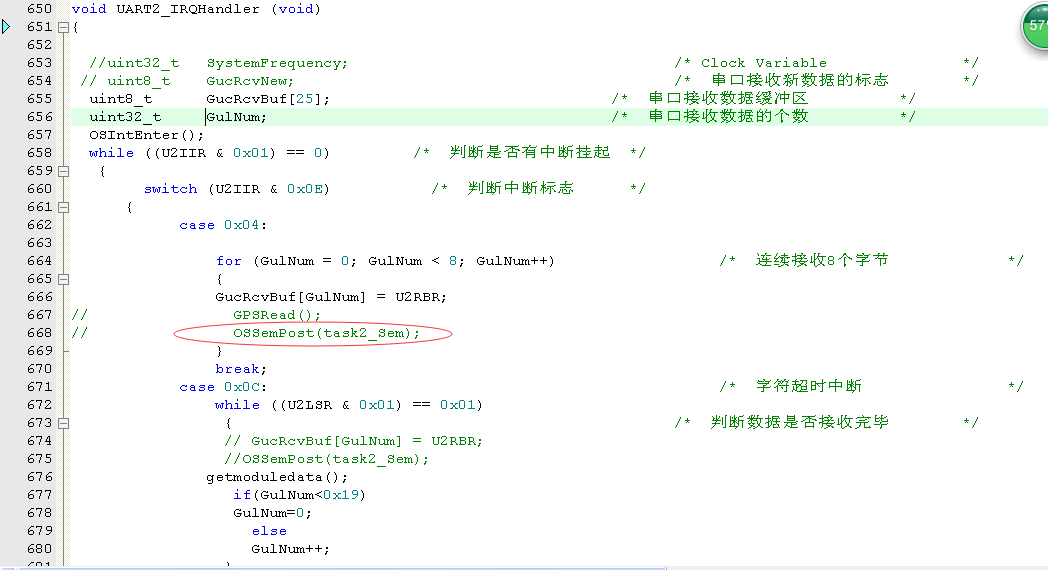
void UART2_IRQHandler (void)
{
//uint32_t SystemFrequency; /* Clock Variable */
// uint8_t GucRcvNew; /* 串口接收新数据的标志 */
uint8_t GucRcvBuf[25]; /* 串口接收数据缓冲区 */
uint32_t GulNum; /* 串口接收数据的个数 */
OSIntEnter();
while ((U2IIR & 0x01) == 0) /* 判断是否有中断挂起 */
{
switch (U2IIR & 0x0E) /* 判断中断标志 */
{
case 0x04: /* 接收数据中断 */
for (GulNum = 0; GulNum < 8; GulNum++) /* 连续接收8个字节 */
{
GucRcvBuf[GulNum] = U2RBR;
// OSSemPost(task2_Sem);
}
break;
case 0x0C: /* 字符超时中断 */
while ((U2LSR & 0x01) == 0x01)
{ /* 判断数据是否接收完毕 */
// GucRcvBuf[GulNum] = U2RBR;
//OSSemPost(task2_Sem);
if(GulNum<0x19)
GulNum=0;
else
GulNum++;
}
break;
default:
break;
}
}
OSIntExit();
}





 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享



