社区
机器视觉
帖子详情
求帮助!为什么我通过视差图生成的点云形状诡异,是一团圆锥状的点云?
鲁中地区有小雨
2017-12-30 09:15:16
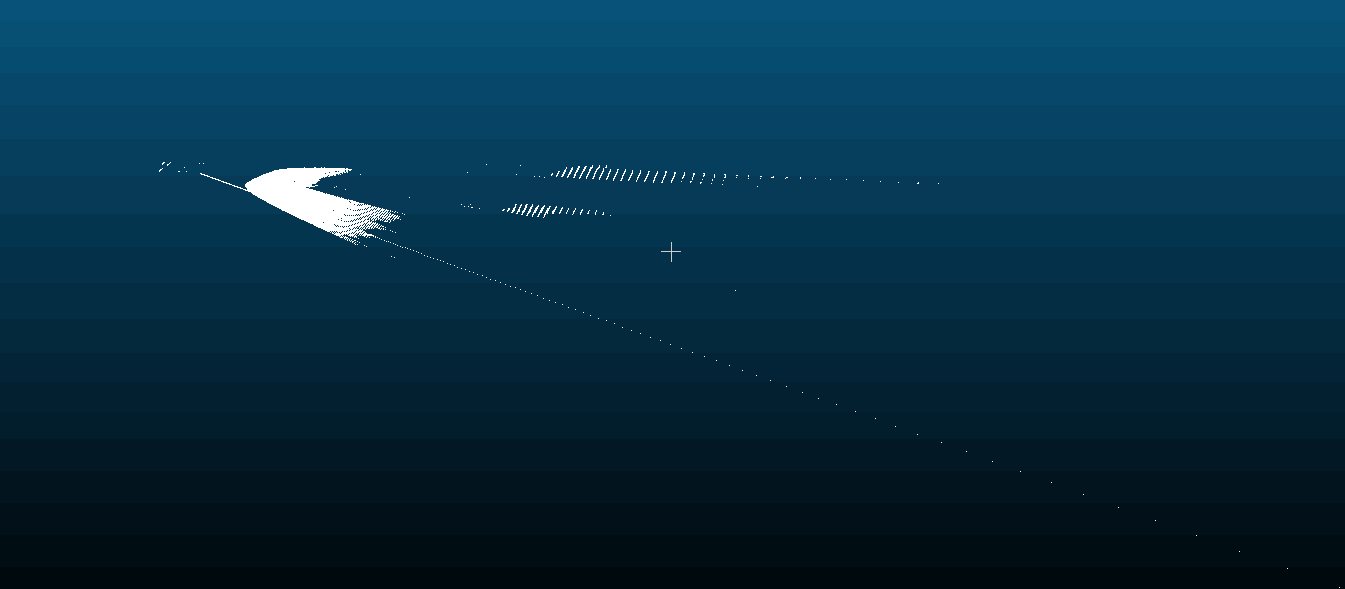
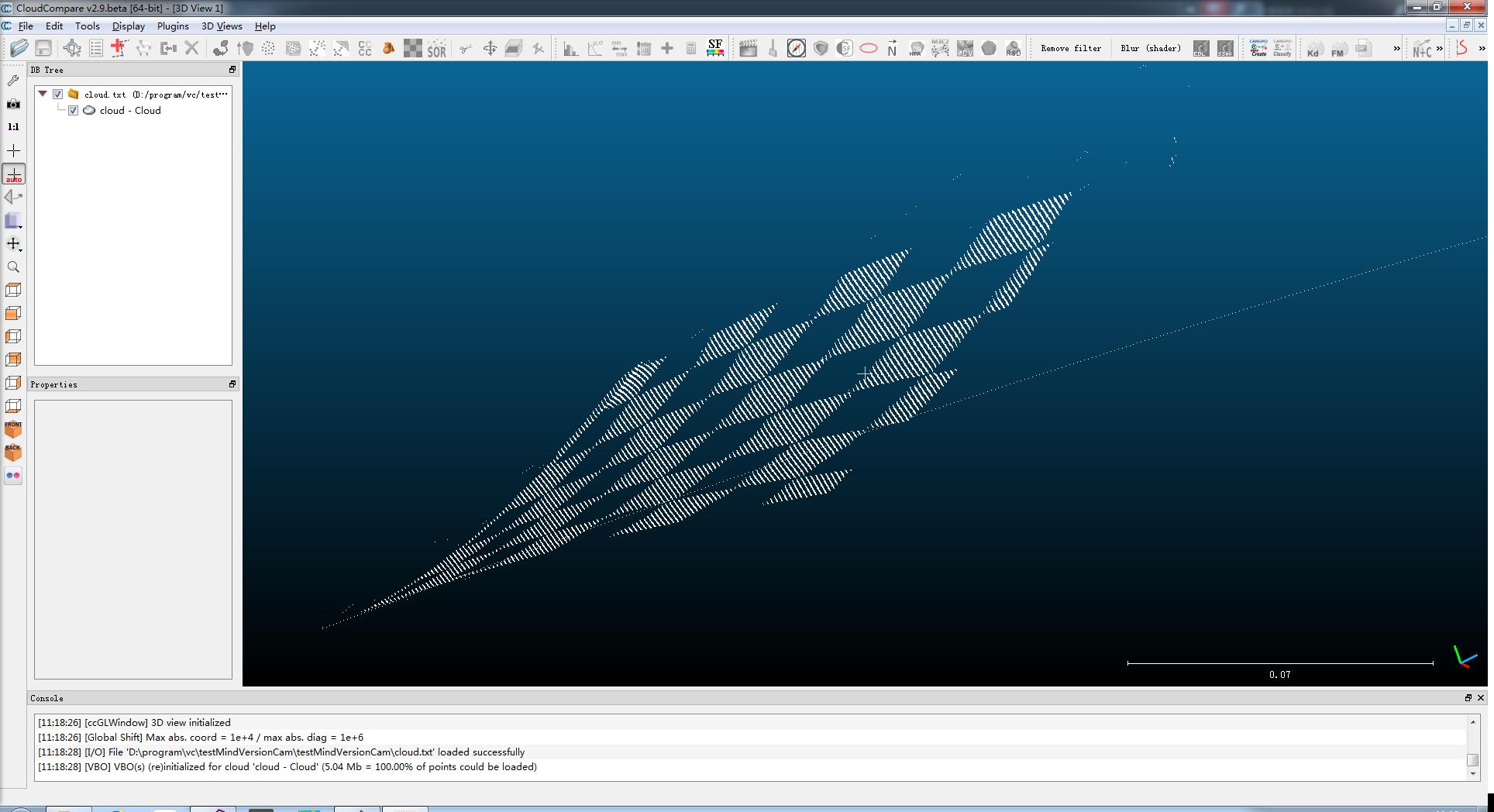
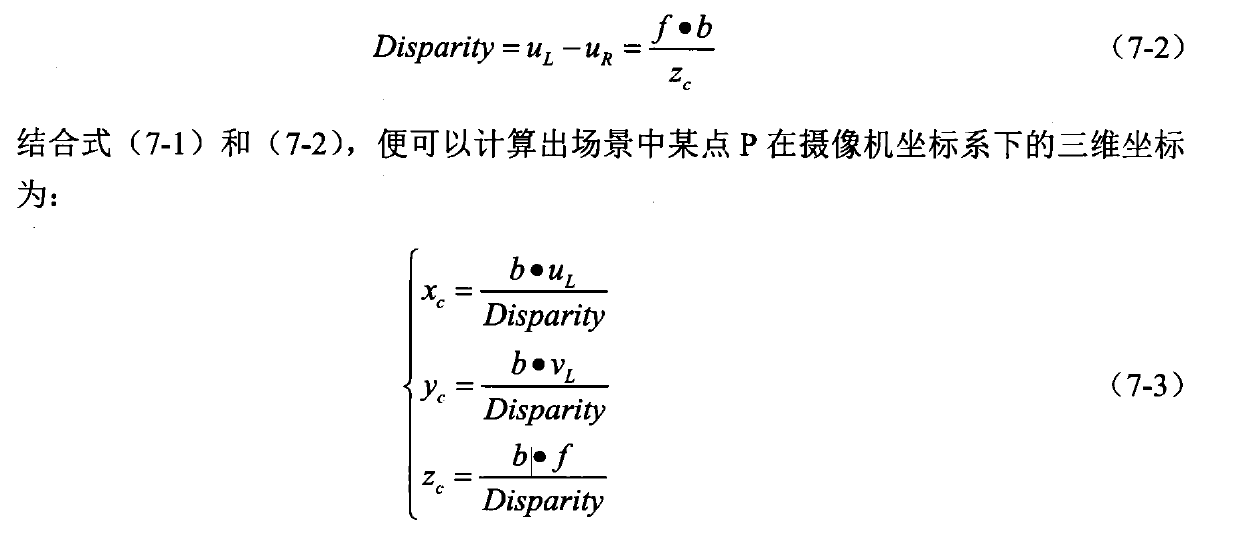
大四了在做毕设,题目是基于结构光的双目视觉测量系统,现在已经通过相位匹配得到了视差图,但是通过视差图计算三维坐标的时候,得出的点云却很不正常,像一个圆锥,计算方法如图,请问各位遇到过这个问题吗?应该如何解决呢?
...全文
804
回复
打赏
收藏
求帮助!为什么我通过视差图生成的点云形状诡异,是一团圆锥状的点云?
大四了在做毕设,题目是基于结构光的双目视觉测量系统,现在已经通过相位匹配得到了视差图,但是通过视差图计算三维坐标的时候,得出的点云却很不正常,像一个圆锥,计算方法如图,请问各位遇到过这个问题吗?应该如何解决呢?
复制链接
扫一扫
分享
转发到动态
举报
写回复
配置赞助广告
用AI写文章
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
Source code.rar_opencv 图片亮度_图像
生成
点云
_水平视差_立体匹配
点云
在opencv上实现双目测距主要步骤是: 1.双目校正和标定,获得摄像头的参数矩阵: 进行标定得出俩摄像头的参数矩阵 cvStereoRectify 执行双目校正 initUndistortRectifyMap 分别
生成
两个图像校正所需的像素映射矩阵 cvremap 分别对两个图像进行校正 2.立体匹配,获得
视差图
: stereoBM
生成
视差图
预处理: 图像归一化,减少亮度差别,增强纹理 匹配过程: 滑动sad窗口,沿着水平线进行匹配搜索,由于校正后左右图片平行,左图的特征可以在右图对应行找到最佳匹配 再过滤: 去除坏的匹配点 通过uniquenessratio 输出
视差图
disparity:如果左右匹配点比较稠密,匹配点多,得到的图像与原图相似度比较大, 如果匹配点比较稀疏,得到的点与原图 相似度比较小 3.得出测距: 把
生成
的
视差图
输入 reprojectImageTo3D()函数,
生成
3D
点云
,3D
点云
中保存有2D图像的三维坐标,再读出每帧图像的三维坐标中的z轴的值,就得出了距离数据。
从
视差图
重建3D
点云
MATLAB
用MATLAB实现从
视差图
重建3D
点云
并显示出来,得到的rgb+XYZ
双目立体
视差图
进行三维
点云
重建【OpenCV3.4.1+PCL1.8】
基于双目立体
视差图
进行三维
点云
的重建,并提供PFM文件转成Mat格式的接口。
点云
重建过程清晰明了、内含所需的所有文件,详情见:https://mp.csdn.net/mdeditor/86644361
视差图
转换物方
点云
(DSM)
根据
视差图
和外方位元素
生成
物方
点云
或数字表面模型
点云
生成
多视角深度图
需要配置PCL
点云
库、以及opencv函数库,记得启用openMP语言支持
机器视觉
4,447
社区成员
15,336
社区内容
发帖
与我相关
我的任务
机器视觉
图形图像/机器视觉
复制链接
扫一扫
分享
社区描述
图形图像/机器视觉
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章



 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享