
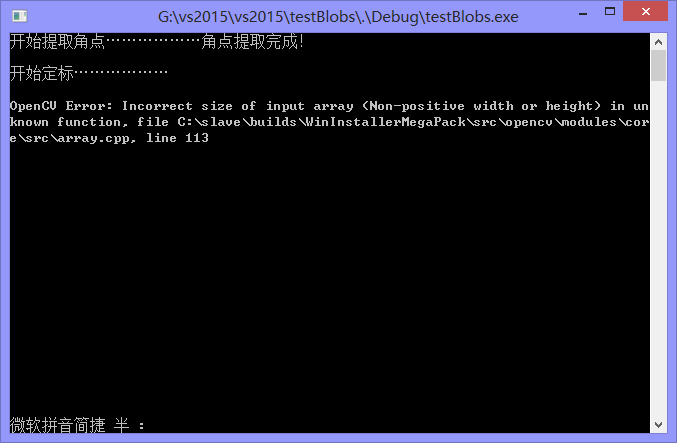
大神们帮看看是啥问题,感激不尽!
源码如下:
#include "cvut.h"
#include <iostream>
#include <fstream>
#include <string>
using namespace cvut;
using namespace std;
void main() {
ifstream fin("calibdata.txt");
ofstream fout("caliberation_result.txt");
cout<<"开始提取角点………………";
int image_count=0;
CvSize image_size;
CvSize board_size = cvSize(5,7);
CvPoint2D32f * image_points_buf = new CvPoint2D32f[board_size.width*board_size.height];
Seq<CvPoint2D32f> image_points_seq;
string filename;
while (std::getline(fin,filename))
{
cout<<"\n 将鼠标焦点移到标定图像所在窗口并输入回车进行下一幅图像的角点提取 \n";
image_count++;
int count;
Image<uchar> view(filename);
if (image_count == 1)
{
image_size.width = view.size().width;
image_size.height = view.size().height;
}
if (0 == cvFindChessboardCorners( view.cvimage, board_size,
image_points_buf, &count, CV_CALIB_CB_ADAPTIVE_THRESH ))
{
cout<<"can not find chessboard corners!\n";
exit(1);
}
else {
Image<uchar> view_gray(view.size(),8,1);
rgb2gray(view,view_gray);
cvFindCornerSubPix( view_gray.cvimage, image_points_buf, count, cvSize(11,11),
cvSize(-1,-1), cvTermCriteria( CV_TERMCRIT_EPS+CV_TERMCRIT_ITER, 30, 0.1 ));
image_points_seq.push_back(image_points_buf,count);
cvDrawChessboardCorners( view.cvimage, board_size, image_points_buf, count, 1);
view.show("calib");
cvWaitKey();
view.close();
}
}
delete []image_points_buf;
cout<<"角点提取完成!\n"<<endl;
cout<<"开始定标………………"<<"\n"<<endl;
CvSize square_size = cvSize(10,10);
Matrix<double> object_points(1,board_size.width*board_size.height*image_count,3);
Matrix<double> image_points(1,image_points_seq.cvseq->total,2);
Matrix<int> point_counts(1,image_count,1);
Matrix<double> intrinsic_matrix(3,3,1);
Matrix<double> distortion_coeffs(1,4,1);
Matrix<double> rotation_vectors(1,image_count,3);
Matrix<double> translation_vectors(1,image_count,3);
int i,j,t;
for (t=0;t<image_count;t++) {
for (i=0;i<board_size.height;i++) {
for (j=0;j<board_size.width;j++) {
object_points(0,t*board_size.height*board_size.width + i*board_size.width + j,0) = i*square_size.width;
object_points(0,t*board_size.height*board_size.width + i*board_size.width + j,1) = j*square_size.height;
object_points(0,t*board_size.height*board_size.width + i*board_size.width + j,2) = 0;
}
}
}
char str[10];
itoa(image_points_seq.cvseq->total,str,10);
cout<<str<<"\n"<<endl;
for (i=0;i<image_points_seq.cvseq->total;i++)
{
image_points(0,i,0) = image_points_seq[i].x;
image_points(0,i,1) = image_points_seq[i].y;
}
for (i=0;i<image_count;i++)
point_counts(0,i) = board_size.width*board_size.height;
cvCalibrateCamera2(object_points.cvmat,
image_points.cvmat,
point_counts.cvmat,
image_size,
intrinsic_matrix.cvmat,
distortion_coeffs.cvmat,
rotation_vectors.cvmat,
translation_vectors.cvmat,
0);
cout<<"定标完成!\n";
cout<<"标定结果显示\n";
cout<<"*************************************************\n";
cout<<"相机内参intrinsic_matrix\n";
for(int h=0;h<3;h++)
{
cout<<"X:"<<intrinsic_matrix(h,0,0)<<"\tY:"<<intrinsic_matrix(h,1,0)<<"\tZ:"<<intrinsic_matrix(h,2,0)<<"\n";
}
cout<<"\n畸变系数:distortion_coeffs\n";
for(int ndis=0;ndis<4;ndis++)
{
cout<<distortion_coeffs(0,ndis,0)<<"\\";
}
cout<<"\n";
cout<<"\nrotation_vectors\n";
for(int rot=0;rot<7;rot++)
{
cout<<"X:"<<rotation_vectors(0,rot,0)<<"\tY:"<<rotation_vectors(0,rot,1)<<"\tZ:"<<rotation_vectors(0,rot,2)<<"\n";
}
cout<<"\ntranslation_vectors\n";
for(i=0;i<7;i++)
{
cout<<"第"<<i+1<<"张图"<<"\tX:"<<translation_vectors(0,i,0)<<"\tY:"<<translation_vectors(0,i,1)<<"\tZ:"<<translation_vectors(0,i,2)<<"\n";
}
cout<<"***************************************************\n";
cout<<"开始评价定标结果………………\n";
double total_err = 0.0;
double err = 0.0;
Matrix<double> image_points2(1,point_counts(0,0,0),2);
int temp_num = point_counts(0,0,0);
cout<<"\t每幅图像的定标误差:\n";
fout<<"每幅图像的定标误差:\n";
for (i=0;i<image_count;i++)
{
cvProjectPoints2(object_points.get_cols(i * point_counts(0,0,0),(i+1)*point_counts(0,0,0)-1).cvmat,
rotation_vectors.get_col(i).cvmat,
translation_vectors.get_col(i).cvmat,
intrinsic_matrix.cvmat,
distortion_coeffs.cvmat,
image_points2.cvmat,
0,0,0,0);
err = cvNorm(image_points.get_cols(i*point_counts(0,0,0),(i+1)*point_counts(0,0,0)-1).cvmat,
image_points2.cvmat,
CV_L1);
total_err += err/=point_counts(0,0,0);
cout<<"******************************************************************\n";
cout<<"\t\t第"<<i+1<<"幅图像的平均误差:"<<err<<"像素"<<'\n';
fout<<"\t第"<<i+1<<"幅图像的平均误差:"<<err<<"像素"<<'\n';
cout<<"显示image_point2\n";
for(int ih=0;ih<7;ih++)
{
cout<<"X:"<<image_points2(0,ih,0)<<"\tY:"<<image_points2(0,ih,1)<<"\n";
}
cout<<"显示object_Points\n";
for(int iw=0;iw<7;iw++)
{
cout<<"X:"<<image_points.get_cols(i*point_counts(0,0,0),(i+1)*point_counts(0,0,0)-1)(0,iw,0)
<<"\tY:"<<image_points.get_cols(i*point_counts(0,0,0),(i+1)*point_counts(0,0,0)-1)(0,iw,1)<<"\n";
}
}
cout<<"\t总体平均误差:"<<total_err/image_count<<"像素"<<'\n';
fout<<"总体平均误差:"<<total_err/image_count<<"像素"<<'\n'<<'\n';
cout<<"评价完成!\n";
cout<<"开始保存定标结果………………";
Matrix<double> rotation_vector(3,1);
Matrix<double> rotation_matrix(3,3);
fout<<"相机内参数矩阵:\n";
fout<<intrinsic_matrix<<'\n';
fout<<"畸变系数:\n";
fout<<distortion_coeffs<<'\n';
for (i=0;i<image_count;i++) {
fout<<"第"<<i+1<<"幅图像的旋转向量:\n";
fout<<rotation_vectors.get_col(i);
for (j=0;j<3;j++) {
rotation_vector(j,0,0) = rotation_vectors(0,i,j);
}
cvRodrigues2(rotation_vector.cvmat,rotation_matrix.cvmat);
fout<<"第"<<i+1<<"幅图像的旋转矩阵:\n";
fout<<rotation_matrix;
fout<<"第"<<i+1<<"幅图像的平移向量:\n";
fout<<translation_vectors.get_col(i)<<'\n';
}
cout<<"完成保存\n";
}





 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享




