Learning ROS for Robotics Programming Second Edition
笔记一记录了一些常用的基本命令(cmd),笔记二介绍一些可视化的编译调试工具(tool)。
--roscore
--roslaunch chapter2_tutorials chapter2.launch
--rosnode list
/chap2_example1_a
/chap2_example1_b
/rosout
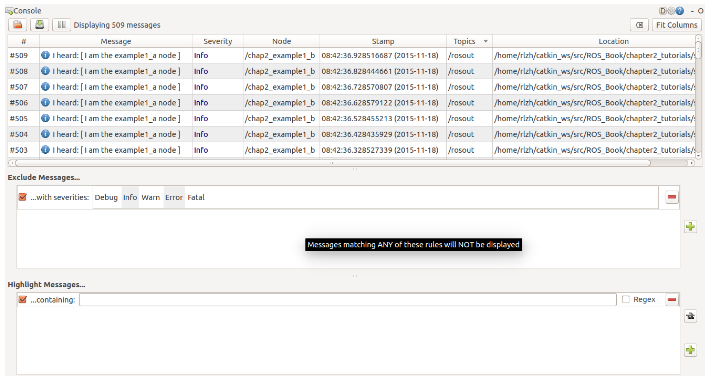
--rqt_console
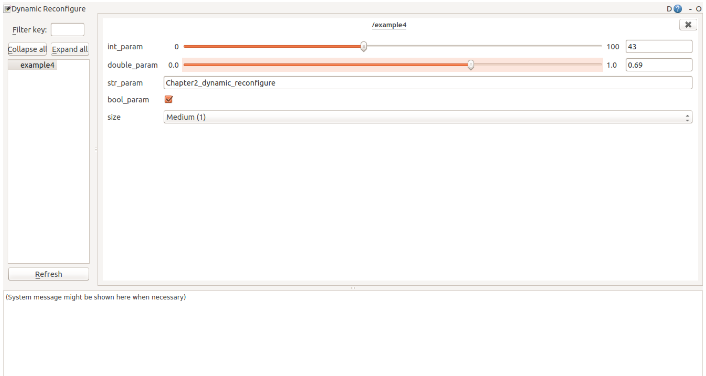
--rosrun chapter2_tutorials chap2_example4
[ INFO] [1447807491.472441519]: Reconfigure Request: 1 0.100000 Chapter2_dynamic_reconfigure True 1
[ INFO] [1447807491.479674316]: Spinning node
--rosrun rqt_reconfigure rqt_reconfigure
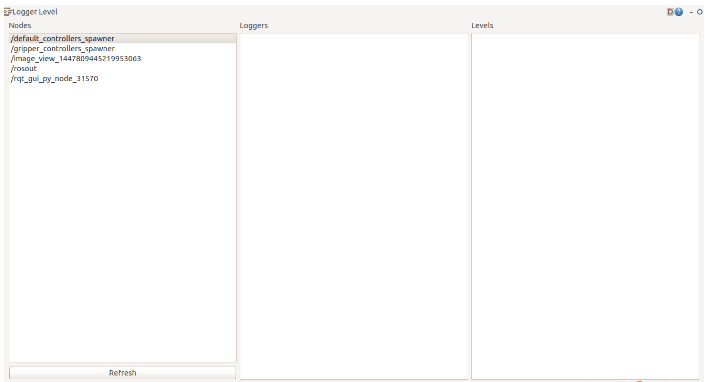
--rosrun rqt_logger_level rqt_logger_level




 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享

