社区
高通开发者论坛
帖子详情
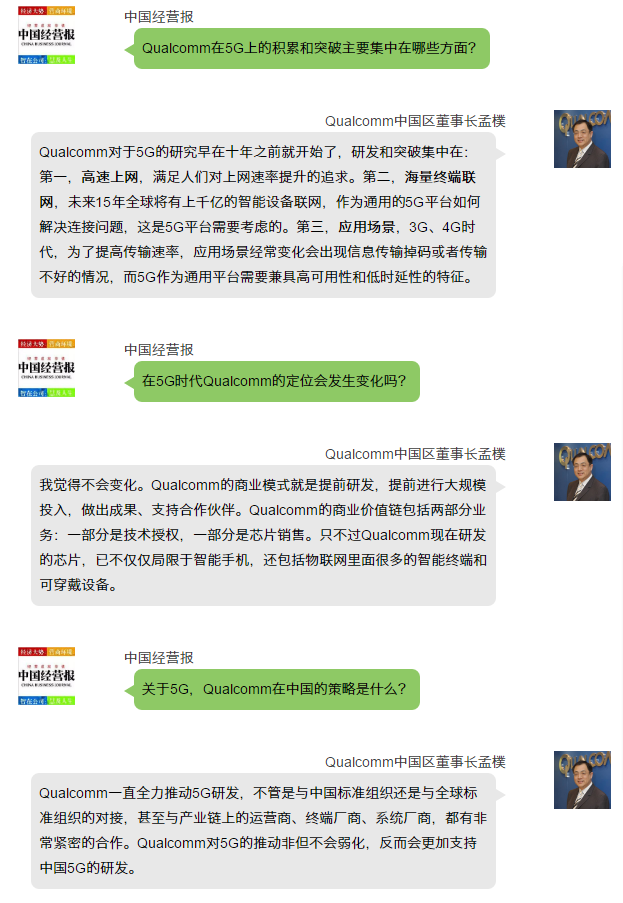
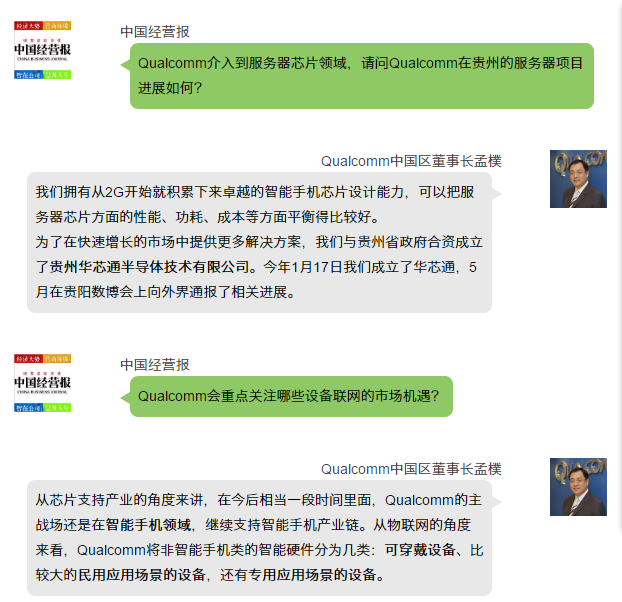
Qualcomm中国区董事长孟樸谈5G时代物联网
东风玖哥
2016-11-03 01:00:53
...全文
2037
4
打赏
收藏
Qualcomm中国区董事长孟樸谈5G时代物联网
[图片]
复制链接
扫一扫
分享
转发到动态
举报
AI
作业
写回复
配置赞助广告
用AI写文章
4 条
回复
切换为时间正序
请发表友善的回复…
发表回复
打赏红包
成续缘
2016-11-14
打赏
举报
回复
5g时代上网费用会更加低廉吗?
zekelove
2016-11-09
打赏
举报
回复
5G来了网速是不是更快,更稳定呢
_明月
2016-11-03
打赏
举报
回复
5G好像要使用一种短途信号发射器。 嗯,据我所知,5G时代到临时,那时将会出现真正的“无线时代”。
东风玖哥
2016-11-03
打赏
举报
回复
Qual
com
m
中国区
董事长
孟樸
:
5G
成就智能新
时代
本次GMIC 2017上,
Qual
com
m
中国区
董事长
孟樸
发表了《
5G
成就智能
时代
》主题演讲,详细阐述了
5G
对我们生活的改变以及高通在
5G
建设之路上所做的努力。
Qual
com
m
中国区
董事长
孟樸
过去30年是互联网飞速发展的30年,前...
大咖说 |
Qual
com
m
中国区
董事长
孟樸
谈
5G
在通信领域,下一个10年将是
5G
的
时代
而相比这个10年已实现普及的4G ...面对即将开启的
5G
时代
,第一财经CBNweekly采访了
Qual
com
m
中国区
董事长
孟樸
,对于
5G
,来看
孟樸
怎么说。 在
孟樸
看来,
5G
带给我们的想象...
爱立信CTO在乌镇:“
5G
与
物联网
推动互联网未来发展”
爱立信亚太区首席技术官Magnus Ewerbring在本次大会移动互联论坛上发表题为《人工智能——
5G
与
物联网
共同推进的互联网未来》的主题演讲,分享了爱立信不断发力
5G
与
物联网
,支持工业互联网持续发展,并介绍了许多实际...
5G
物联网
创新计划发布,
Qual
com
m携合作伙伴共绘生态蓝图
今天,“聚众智 惠百业 创未来”
Qual
com
m
5G
物联网
生态合作产业峰会举行,为产业界带来了一场云端生态盛宴。
Qual
com
m携手运营商、模组厂商、终端厂商和解决方案商等产业链上下游合作伙伴,共同展示了
5G
物联网
最新...
高通
孟樸
:
5G
技术将会改变很多行业的格局
Qual
com
m
中国区
董事长
孟樸
近日,2017年中国电子信息博览会在深圳举行,业内知名无线通信和芯片制造商
Qual
com
m(以下简称“高通”)携未来通信的
5G
技术方案以及相关产品出席展会。期间,高通
中国区
董事长
孟樸
接受媒体...
高通开发者论坛
5,369
社区成员
5,923
社区内容
发帖
与我相关
我的任务
高通开发者论坛
本论坛以AI、WoS 、XR、IoT、Auto、生成式AI等核心板块组成,为开发者提供便捷及高效的学习和交流平台。 高通开发者专区主页:https://qualcomm.csdn.net/
复制链接
扫一扫
分享
社区描述
本论坛以AI、WoS 、XR、IoT、Auto、生成式AI等核心板块组成,为开发者提供便捷及高效的学习和交流平台。 高通开发者专区主页:https://qualcomm.csdn.net/
人工智能
物联网
机器学习
技术论坛(原bbs)
北京·东城区
社区管理员
加入社区
获取链接或二维码
近7日
近30日
至今
加载中
查看更多榜单
社区公告
暂无公告
试试用AI创作助手写篇文章吧
+ 用AI写文章







 发帖
发帖 与我相关
与我相关 我的任务
我的任务
 分享
分享
